一种传动机构及机械抓手的制作方法
本技术涉及机械手爪的,尤其涉及一种传动机构及机械抓手。
背景技术:
1、在工业生产过程中,经常会遇到一些情况,工作人员因为手臂长度或者场地的限制,无法去抓取指定物品,或者掉落在一些会伤害人身安全的液体中物体,人工无法进行拾取。
2、现在机械手大部分都是纯自动的,是对一些特定设备进行工作的,而对于突发状况难以去处理,这种机械手还比较缺乏,无法做到便携性。
技术实现思路
1、本部分的目的在于概述本实用新型的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
2、鉴于上述一种传动机构存在人工不便抓取的问题,提出了本实用新型。
3、因此,本实用新型目的是提供一种传动机构,其目的在于:方便工作人员去抓取物品。
4、为解决上述技术问题,本实用新型提供如下技术方案:一种传动机构,包括传递部件,其包括握把,设置于握把底部的柱状体,设置于所述柱状体内部的同步块,所述柱状体为中空圆柱体。
5、作为本实用新型所述传动机构的一种优选方案,其中:所述握把的底部设置有支撑柱,所述支撑柱对称设置有两个。
6、作为本实用新型所述传动机构的一种优选方案,其中:所述握把为中空结构,所述握把的内部设置有弹簧,所述弹簧设置有若干个。
7、作为本实用新型所述传动机构的一种优选方案,其中:所述柱状体的一侧设置有圆孔,所述同步块与所述柱状体通过所述圆孔滑动连接。
8、作为本实用新型所述传动机构的一种优选方案,其中:所述同步块的一侧设置有限位块,所述限位块设置有四个。
9、作为本实用新型所述传动机构的一种优选方案,其中:所述同步块的顶部设置有拉环,所述拉环固定连接于所述弹簧的底部。
10、作为本实用新型所述传动机构的一种优选方案,其中:所述柱状体的底部设置有连接件,所述连接件的一侧贯穿设置有方形孔。
11、作为本实用新型所述传动机构的一种优选方案,其中:所述柱状体的内部设置有传动件,所述传动件的一侧设置有螺纹孔。
12、本发明的有益效果:本实用新型通过拉环和同步块等装置进行配合,从而利用手的握力就可以拉动传动件进行移动,增加了工作人员的工作效率。
13、鉴于上述一种机械抓手存在无法便携的问题,提出了本实用新型。
14、因此,本实用新型目的是提供一种传动机构,其目的在于:方便工作人员去去任意场所去工作。
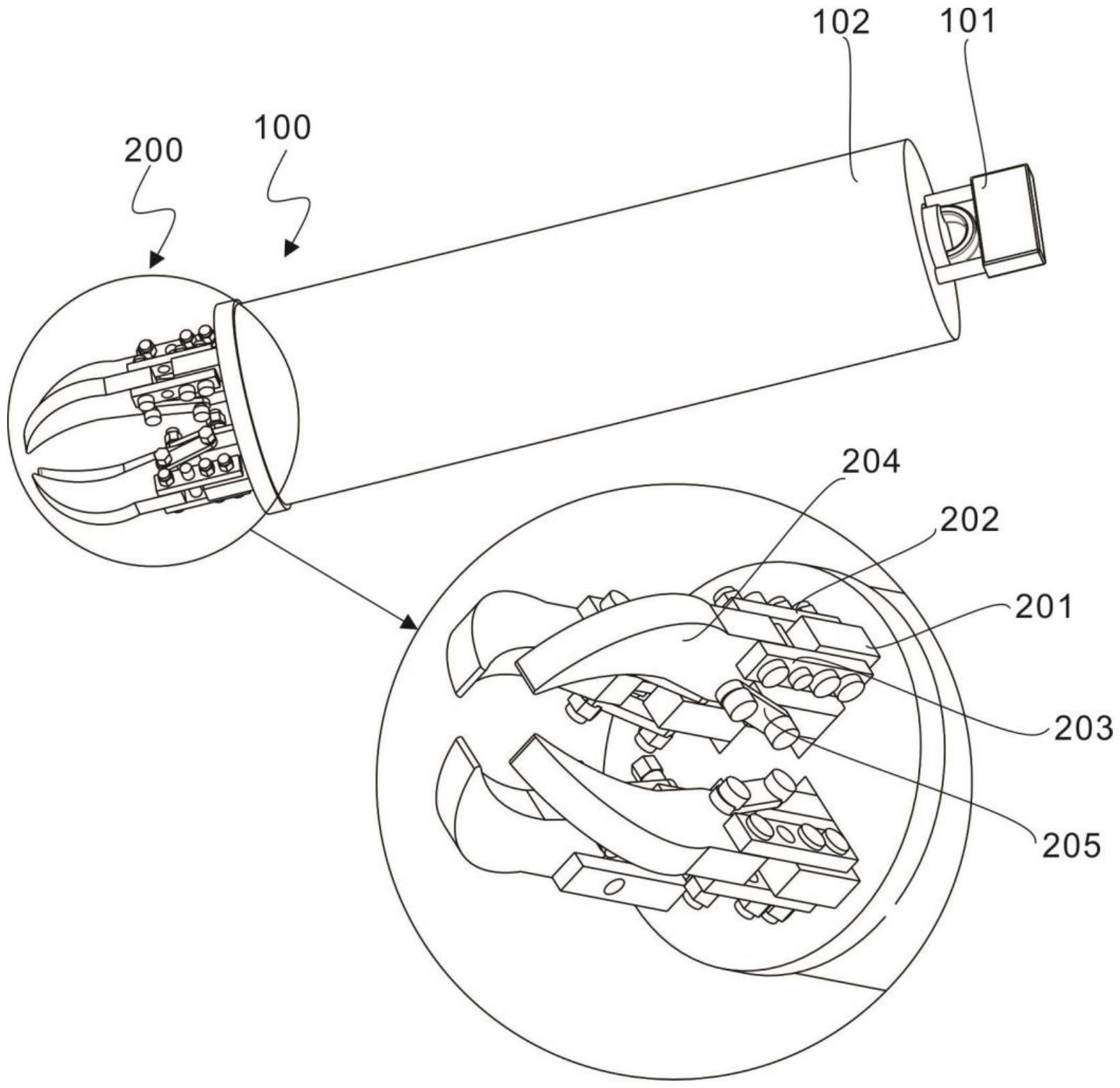
15、为解决上述技术问题,本实用新型提供如下技术方案:一种机械抓手,包括抓取部件,其包括设置于所述连接件一侧的支撑件,分别设置于所述支撑件两侧的第一矩形块和第二矩形块。
16、作为本实用新型所述机械抓手的一种优选方案,其中:述第一矩形块和所述第二矩形块的一侧设置有爪,设置于所述爪底部的传动块。
17、本实用新型的另一个有益效果:本实用新型通过手爪的设置可以帮助工作人员去抓取任何位置,极大的提升了便携性,方便工作人员去处理突发情况。
技术特征:
1.一种传动机构,其特征在于:包括,
2.根据权利要求1所述的传动机构,其特征在于:所述握把(101)的底部设置有支撑柱(101a),所述支撑柱(101a)对称设置有两个。
3.根据权利要求2所述的传动机构,其特征在于:所述握把(101)为中空结构,所述握把(101)的内部设置有弹簧(101b),所述弹簧(101b)设置有若干个。
4.根据权利要求3所述的传动机构,其特征在于:所述柱状体(102)的一侧设置有圆孔(102a),所述同步块(103)与所述柱状体(102)通过所述圆孔(102a)滑动连接。
5.根据权利要求4所述的传动机构,其特征在于:所述同步块(103)的一侧设置有限位块(103a),所述限位块(103a)设置有四个。
6.根据权利要求3~5任一所述的传动机构,其特征在于:所述同步块(103)的顶部设置有拉环(104),所述拉环(104)固定连接于所述弹簧(101b)的底部。
7.根据权利要求6所述的传动机构,其特征在于:所述柱状体(102)的底部设置有连接件(105),所述连接件(105)的一侧贯穿设置有方形孔(105a)。
8.根据权利要求5或7所述的传动机构,其特征在于:所述柱状体(102)的内部设置有传动件(106),所述传动件(106)的一侧设置有螺纹孔(106a)。
9.一种机械抓手,其特征在于:包括权利要求1~8任一所述的传动机构,还包括,
10.根据权利要求9所述的机械抓手,其特征在于:所述第一矩形块(202)和所述第二矩形块(203)的一侧设置有爪(204),设置于所述爪(204)底部的传动块(205)。
技术总结
本技术公开一种传动机构及机械抓手,包括传递部件,其包括握把,设置于握把底部的柱状体,设置于柱状体内部的同步块,柱状体为中空圆柱体,握把的底部设置有支撑柱,支撑柱对称设置有两个,握把为中空结构,握把的内部设置有弹簧,弹簧设置有若干个,柱状体的一侧设置有圆孔,同步块与柱状体通过圆孔滑动连接,同步块的一侧设置有限位块,限位块设置有四个,同步块的顶部设置有拉环,拉环固定连接于弹簧的底部,本技术通过拉环和同步块等装置进行配合,从而利用手的握力就可以拉动传动件进行移动,增加了工作人员的工作效率,通过手爪的设置可以帮助工作人员去抓取任何位置,极大的提升了便携性,方便工作人员去处理突发情况。
技术研发人员:迮有林,汤书兵,闵济保
受保护的技术使用者:江苏鼎鑫智造科技股份有限公司
技术研发日:20221231
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!