自动对心定位爪子机构的制作方法
本技术涉及夹具,尤其是自动对心定位爪子机构。
背景技术:
1、在薄基板自动化产线上,对这种板状工件加工或测试时,首先需要对工件位置进行定位抓取,在工件抓取的过程中还要同时实现以下效果:
2、第一、能够实现对工件的夹持同时还能达到自动定心的功能;第二、由于薄基板容易损坏,因此在夹持时减少对工件的损坏损。
3、因此目前市场上通常采用人工的方式进行,但是人工操作效率太低。
4、为此,我们提出自动对心定位爪子机构。
技术实现思路
1、本申请人针对上述现有生产技术中的缺点,提供自动对心定位爪子机构,从而通过升降电机带动锥度头上升,多个滑动组件在拉簧的作用下向内收缩,从而带动夹爪对工件进行夹持,而且由于多个夹板的位置关系经过调节与工件的形状相同,因此在夹持时能够实现自定心的效果。
2、本实用新型所采用的技术方案如下:
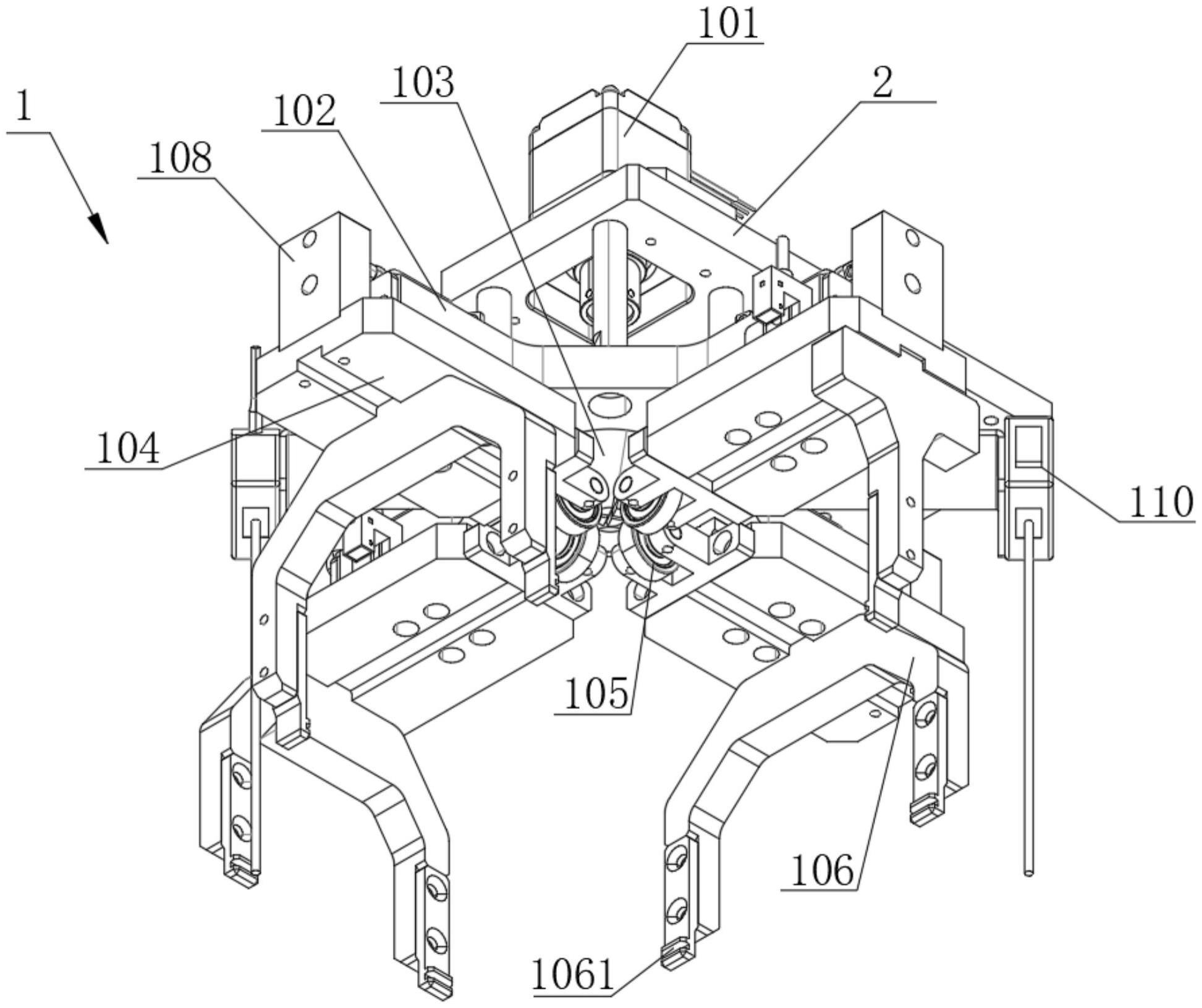
3、自动对心定位爪子机构,包括抓取机构,以及对抓取机构进行固定的桥板,所述抓取机构为层状结构,从上至下依次包括:
4、升降电机、滑块固定板、滑动在滑块固定板下端并位于不同方向的多个滑动组件,以及连接在滑动组件下端的夹板;
5、所述升降电机和滑块固定板均固定连接在桥板上,升降电机的驱动轴上连接有穿过滑块固定板并向下延伸的锥度头,且锥度头的周向抵触有多个滚轮,多个滚轮分别连接在对应的滑动组件上,并随着锥度头的下降带动多个夹板向外扩张,脱开工件;
6、所述滑动组件的端部连接有与滑块固定板的侧壁相对的限位块,且限位块与滑块固定板之间通过拉簧进行连接,带动多个夹板同步向内收缩,夹持工件。
7、其进一步特征在于:
8、所述桥板上连接有连接件,且桥板通过连接件与位移装置连接达到对任意位置的抓取。
9、所述滑块固定板为星形结构,即具备中心的主板以及向四周发散的支板,支板数量与工件形状相关,且滑动组件分别滑动在各个支板上。
10、所述滑块固定板上设置有与驱动轴相适应的导套。
11、所述拉簧的一端连接在滑块固定板的顶部,且拉簧的另一端连接在限位块上,以缩短行程。
12、所述滑动组件上设置与夹板相对应的排孔,继而方便根据工件的形状长宽调整夹板的位置。
13、所述夹板上连接有对工件进行夹持的夹爪,且夹爪上开设有对工件进行限位的卡槽。
14、所述滑动组件和滑块固定板连接有相对应的位移传感器。
15、所述滑块固定板的侧壁上通过连接板连接有多个用于检测工件位置的光电传感器。
16、所述桥板的侧壁上还连接有支撑板,且支撑板的连接有处于同一条直线上的相机模块和光源,可进行视觉引导进行精确放置。
17、本实用新型的有益效果如下:
18、本实用新型结构紧凑、合理,操作方便,通过升降电机带动锥度头下降,锥度头撑开多个滚轮从而带动多个夹爪向外扩张,移动到夹持工位后,再通过升降电机带动锥度头上升,多个滑动组件在拉簧的作用下向内收缩,从而带动夹爪对工件进行夹持,而且由于多个夹板的位置关系经过调节与工件的形状相同,因此在夹持时能够实现自定心的效果,而且不易损坏工件,具有很强的实用性。
19、同时,本实用新型还具备如下优点:
20、(1).由于多个滚轮均通过同一个锥度头带动,而且滑块固定板上设置有与驱动轴相适应的导套,确保锥度头在垂直方向移动,能够确保多个滚轮向外扩张的速率相同,即多个夹爪的扩张长度相同。
21、(2).由于多个夹爪的扩张长度相同,而且滑动组件上设置与夹板相对应的排孔,继而方便根据工件的形状长宽调整夹板的位置,从而保证本实施例中多个夹爪的位置关系与工件相同,因此当多个夹爪收缩时,能够对工件进行定心抓取。
22、(3).滑块固定板为星形结构,即具备中心的主板以及向四周发散的支板,支板数量与工件形状相关,且滑动组件分别滑动在各个支板上,本专利中的工件为矩形,因此设计的支板数量为个,由于滑块固定板为星形结构,能够让出更多的空间,方便在滑块固定板的侧壁上连接有多个用于检测工件位置的光电传感器。
23、(4).通过拉簧的柔性夹持,不容易损坏工件,再加上夹爪上开设有对工件进行限位的卡槽,在本专利中卡槽为横槽,能够限制工件脱落,因此可以在使用很小的夹持力的作用下实现对工件的抓取。
技术特征:
1.自动对心定位爪子机构,其特征在于,包括抓取机构(1),以及对抓取机构(1)进行固定的桥板(2),所述抓取机构(1)为层状结构,从上至下依次包括:
2.如权利要求1所述的自动对心定位爪子机构,其特征在于:所述桥板(2)上连接有连接件(3),且桥板(2)通过连接件(3)与位移装置连接达到对任意位置的抓取。
3.如权利要求2所述的自动对心定位爪子机构,其特征在于:所述滑块固定板(102)为星形结构,即具备中心的主板以及向四周发散的支板,支板数量与工件(7)形状相关,且滑动组件(104)分别滑动在各个支板上。
4.如权利要求1所述的自动对心定位爪子机构,其特征在于:所述滑块固定板(102)上设置有与驱动轴相适应的导套。
5.如权利要求3所述的自动对心定位爪子机构,其特征在于:所述拉簧(108)的一端连接在滑块固定板(102)的顶部,且拉簧(108)的另一端连接在限位块(107)上,以缩短行程。
6.如权利要求5所述的自动对心定位爪子机构,其特征在于:所述滑动组件(104)上设置与夹板(106)相对应的排孔,继而方便根据工件(7)的形状长宽调整夹板(106)的位置。
7.如权利要求1所述的自动对心定位爪子机构,其特征在于:所述夹板(106)上连接有对工件(7)进行夹持的夹爪(1061),且夹爪(1061)上开设有对工件(7)进行限位的卡槽。
8.如权利要求1所述的自动对心定位爪子机构,其特征在于:所述滑动组件(104)和滑块固定板(102)连接有相对应的位移传感器(111)。
9.如权利要求8所述的自动对心定位爪子机构,其特征在于:所述滑块固定板(102)的侧壁上通过连接板(109)连接有多个用于检测工件(7)位置的光电传感器(110)。
10.如权利要求1所述的自动对心定位爪子机构,其特征在于:所述桥板(2)的侧壁上还连接有支撑板(4),且支撑板(4)的连接有处于同一条直线上的相机模块(5)和光源(6),可进行视觉引导进行精确放置。
技术总结
自动对心定位爪子机构,包括升降电机、滑块固定板、多个滑动组件,夹板;升降电机的驱动轴上连接有锥度头,且锥度头的周向抵触有多个滚轮,多个滚轮分别连接在对应的滑动组件上,并随着锥度头的下降带动多个夹板向外扩张,脱开工件;所述滑动组件的端部连接限位块,且限位块与滑块固定板之间通过拉簧进行连接,带动多个夹板同步向内收缩,夹持工件。本技术结构紧凑、合理,操作方便,通过升降电机带动锥度头上升,多个滑动组件在拉簧的作用下向内收缩,从而带动夹爪对工件进行夹持,而且由于多个夹板的位置关系经过调节与工件的形状相同,因此在夹持时能够实现自定心的效果。
技术研发人员:伍文杰
受保护的技术使用者:无锡捷荣精密机械有限公司
技术研发日:20221230
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!