一种伺服模组及机器人的制作方法
本申请属于机器人结构设计,尤其涉及一种伺服模组及机器人。
背景技术:
1、目前的机器人中存在较多的由能够相对旋转运动的两个结构件装配形成的关节部位,这些关节部位的旋转运动均通过电机进行驱动,即通过电机驱动其中一个结构件相对于另一个结构件进行旋转运动,例如仿人形机器人的膝部关节部位,电机安装于大腿肢干,电机驱动小腿肢干相对于大腿肢干进行旋转运动,从而实现膝部关节部位的旋转运动。相应的,对于每个关节部位处使用的电机,均要配置相应的控制模块,以对电机进行控制并与机器人的中央控制系统进行通信。控制模块和电机构成了用于关节部位的伺服模组。
2、在现有的一些机器人中,控制模块将控制功能、驱动功能以及功率控制功能等均集合在一块电路板上,然后将该电路板装配到壳体中并和电动机的装配壳体相连接固定而形成模块化的伺服模组。由于成型后的控制模块的体积较大,因而使得最终成型的伺服模组的体积过大,继而导致机器人的各个关节部位显得十分臃肿,不符合机器人追求的小体积化的设计思路。
3、在现有的另一些机器人中,由控制模块将控制功能、驱动功能以及功率控制功能等均集合在一块电路板而导致了机器人的各个关节臃肿,因此,控制模块并未和电机组装到一起而形成模块化的伺服模组,而是将控制模块装配的机器人的身躯的容纳空间中,然后通过布线来连接电机。这样虽然能够减小机器人的各个关节部位的体积来实现小体积化设计,但是却违背了现有机器人的模块化发展趋势。
技术实现思路
1、本申请的目的在于提供一种伺服模组及机器人,旨在解决现有机器人的伺服模组的体积过大,要么导致机器人的各个关节部位体积大、臃肿的问题,要么导致控制模块和电机不能形成模块化设计的问题。
2、为实现上述目的,本申请采用的技术方案是:一种伺服模组,包括:
3、壳体,壳体形成有第一装配空间和第二装配空间;
4、驱动机构,驱动机构安装于第一装配空间,且驱动机构的输出轴穿出壳体;
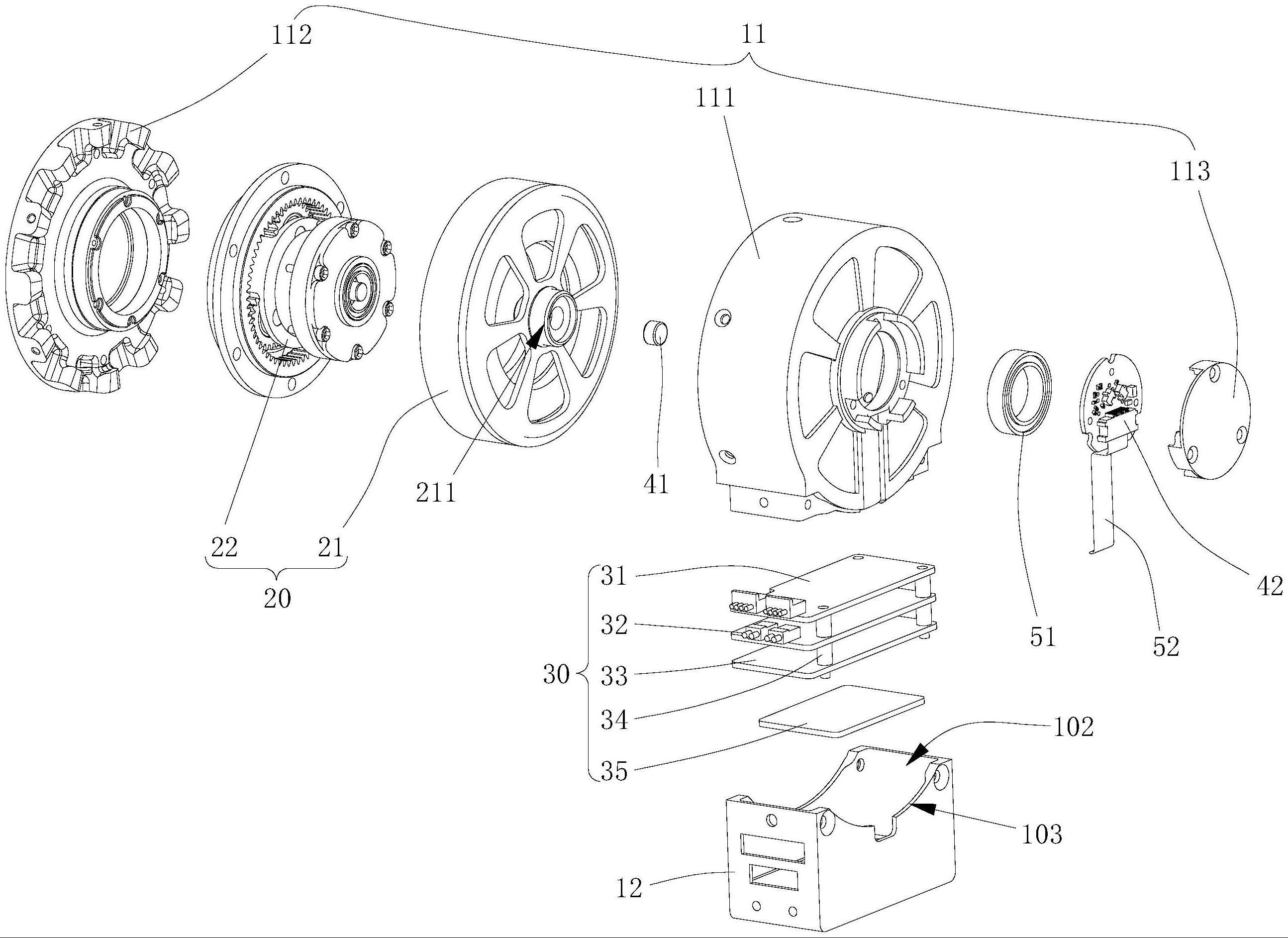
5、伺服控制器,伺服控制器安装于驱动机构侧边的第二装配空间,伺服控制器包括控制板、驱动板、功率板及连接构件,驱动板和功率板均和控制板电性连接,驱动机构和控制板电性连接,控制板、驱动板及功率板通过连接构件呈叠层式放置。
6、在一种实施例中,壳体包括第一壳和第二壳,第一壳设有第一装配空间,第二壳设有第二装配空间及与第二装配空间相连通的端口,端口的轮廓形状和第一壳的外壁轮廓相适配且第二壳连接在第一壳上,驱动机构的输出轴的中心轴线方向垂直于第一壳至第二壳的连线方向。
7、在一种实施例中,叠层式放置的控制板、驱动板和功率板中相邻两层之间通过连接构件形成间隔,且功率板位于与端口相对的第二装配空间的底部,功率板和第二装配空间的底部之间导热相连。
8、在一种实施例中,伺服控制器还包括散热板,散热板设置于功率板和第二装配空间的底部之间,散热板的两侧分别和功率板、第二装配空间的底部导热相接。
9、在一种实施例中,第二壳为金属壳体。
10、在一种实施例中,驱动机构包括伺服电机和减速器,伺服电机的输出转轴和减速器的输入端驱动连接,减速器的输出端用于输出动力。
11、在一种实施例中,减速器为行星减速器。
12、在一种实施例中,伺服模组还包括位置检测机构,位置检测机构和控制板电性连接,位置检测机构用于检测伺服电机的输出转轴的位置信息以生成位置信号,并且位置检测机构向控制板发送位置信号。
13、在一种实施例中,位置检测机构包括带磁元件及位置检测单元,带磁元件安装于伺服电机的输出转轴的端部,带磁元件随伺服电机的输出转轴同步转动,位置检测单元安装于壳体并与带磁元件相正对设置,位置检测单元和控制板电性连接,位置检测单元用于检测带磁元件的位置信息以生成位置信号。
14、根据本申请的另一方面,提供了一种机器人。具体的,该机器人包括前述的伺服模组。
15、本申请至少具有以下有益效果:
16、应用本申请的伺服模块来装配至机器人的关节部位处,一方面通过壳体设计第一装配空间和第二装配空间,将驱动机构和伺服控制器分别装配在第一装配空间和第二装配空间中,从而成型为模块化的伺服模组,另一方面,该伺服模组的伺服控制器设置了控制板、驱动板和功率板,将控制功能、驱动功能和功率控制功能进行区分,从而分别设计在不同的电路板上,然后将控制板、驱动板和功率板进行叠层式放置在第二装配空间中,相对于现有机器人的控制模块而言,本申请的伺服控制器的体积明显减小,继而使得伺服模组的整体体积减小。在将本申请的伺服模组应用至机器人的各个关节时,也就能够相应减小机器人的各个关节的体积大小,使得各个关节部位实现小体积化设计。并且,实现了小体积化设计的机器人的各个关节部位的旋转运动也能够更加灵活、响应更稳定。
技术特征:
1.一种伺服模组(100),其特征在于,包括:
2.根据权利要求1所述的伺服模组(100),其特征在于,
3.根据权利要求2所述的伺服模组(100),其特征在于,
4.根据权利要求3所述的伺服模组(100),其特征在于,
5.根据权利要求4所述的伺服模组(100),其特征在于,
6.根据权利要求1-5任一项所述的伺服模组(100),其特征在于,
7.根据权利要求6所述的伺服模组(100),其特征在于,
8.根据权利要求6所述的伺服模组(100),其特征在于,
9.根据权利要求8所述的伺服模组(100),其特征在于,
10.一种机器人,其特征在于,所述机器人包括如权利要求1-9任一项所述的伺服模组(100)。
技术总结
本申请属于机器人结构设计技术领域,尤其涉及一种伺服模组及机器人。其中,伺服模组包括壳体、驱动机构与伺服控制器。壳体用于安装和固定驱动机构与伺服控制器。驱动机构提供动力输出。伺服控制器用于控制驱动机构。应用本申请的伺服模块,一方面将驱动机构和伺服控制器分别装配在不同的空间中,从而成型为模块化的伺服模组,另一方面,该伺服模组的伺服控制器内部进行叠层式放置,使得伺服模组的整体体积明显减小,解决了现有机器人的伺服模组的体积过大,要么导致机器人的各个关节部位体积大、臃肿的问题,要么导致控制模块和电机不能形成模块化设计的问题。
技术研发人员:李汉平,杜旭超,周博,王浩
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:20221228
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!