机器人的制作方法
本发明涉及机器人。
背景技术:
1、已知一种具备能够水平旋转的第一臂以及第二臂的吊挂型scara机器人(例如,参照专利文献1。)。该scara机器人具备头部罩,所述头部罩从上方覆盖支撑于第二臂的前端的工作轴以及驱动工作轴的驱动部。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2017-7011号公报
技术实现思路
1、发明要解决的问题
2、在专利文献1的scara机器人中,第一臂与第二臂的连接部没有被头部罩覆盖。因此,在从第一臂向第二臂布线电缆等的情况下,为了使电缆等在不露出于外部的情况下与头部罩内的驱动部连接,需要使电缆穿过第二臂内,第二臂的结构变复杂。
3、因此,希望在不使第二臂的结构复杂化的情况下保护从第一臂向第二臂布线的电缆等。
4、用于解决问题的方案
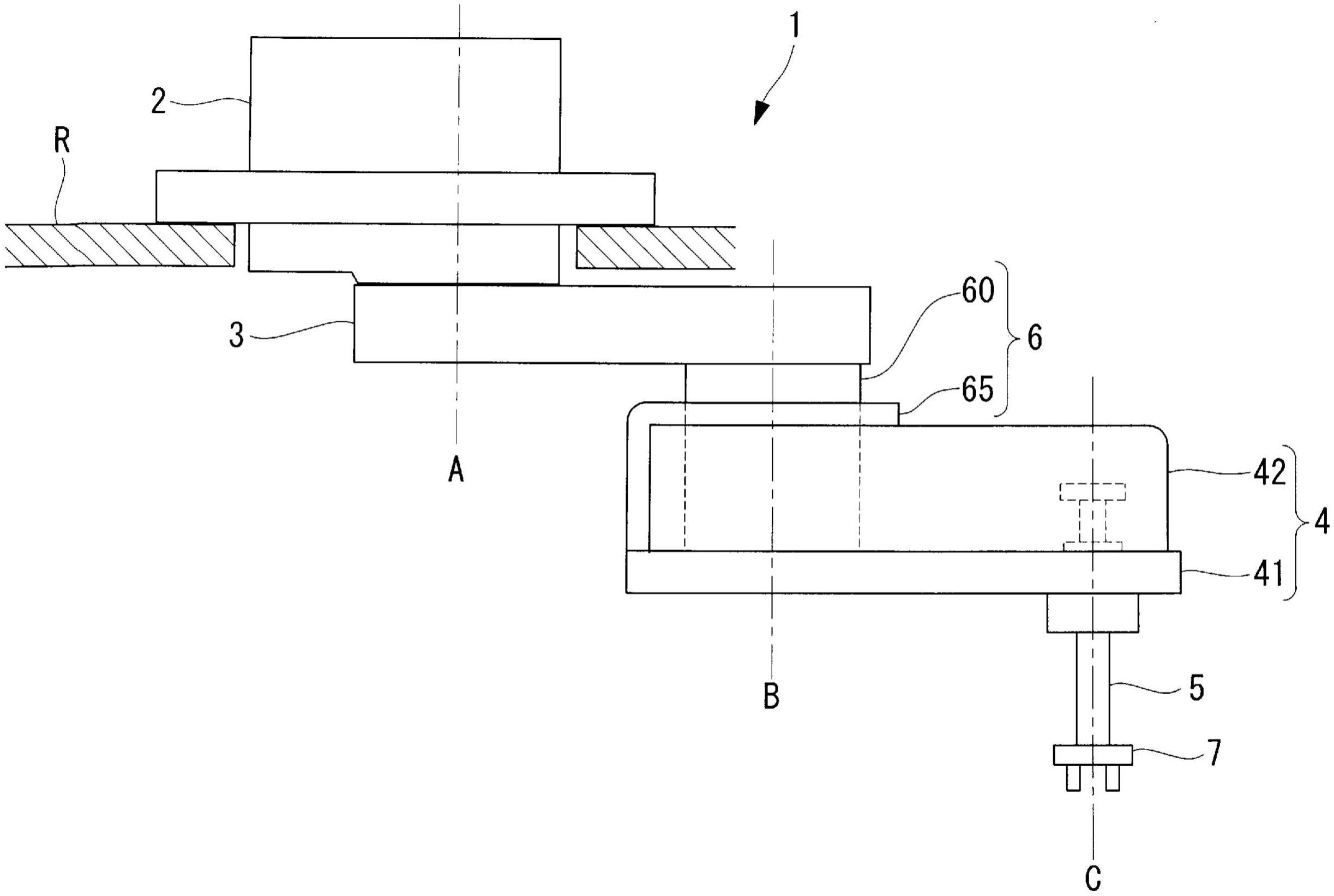
5、本发明的一个方案是一种机器人,所述机器人具备:第一臂;第二臂;以及连接部,其以能够围绕竖直轴线旋转的方式连接所述第一臂与所述第二臂,该连接部具备:柱状的柱状部,其沿着所述竖直轴线的方向延伸;以及第一罩部,其从该柱状部的外周面向与所述竖直轴线交叉的方向延伸,所述第二臂具备:主体部,其与所述柱状部连接;以及第二罩部,其通过安装于所述第一罩部,从而将所述外周面的至少一部分以及所述主体部的所述第一臂侧的表面所面对的空间包围成封闭的状态。
技术特征:
1.一种机器人,其特征在于,具备:
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求1或2所述的机器人,其特征在于,
4.根据权利要求1至3中任一项所述的机器人,其特征在于,
技术总结
一种机器人(1),具备:第一臂(3);第二臂(4);以及连接部(6),其以能够围绕竖直轴线(B)旋转的方式连接第一臂(3)与第二臂(4),连接部(6)具备:柱状的柱状部(60),其沿着竖直轴线(B)的方向延伸;以及第一罩部(65),其从柱状部(60)的外周面向与竖直轴线(B)交叉的方向延伸,第二臂(4)具备:主体部(41),其与柱状部(60)连接;以及第二罩部(42),其通过安装于第一罩部(65),从而将外周面的至少一部分以及主体部(41)的第一臂(3)侧的表面所面对的空间包围成封闭的状态。
技术研发人员:渡边圭
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1