机器人控制系统的制作方法
本发明涉及机器人控制系统。
背景技术:
1、在产业用机器人等的机器人中设置有用于不使该机器人与工件等的其他的物体碰撞、或者在碰撞的情况下为了确保安全而控制的机构。例如,在专利文献1中提出了一种伺服电动机的异常负荷检测控制方法,其特征在于,在伺服电动机的控制中的异常负荷检测时的控制方法中,对所述伺服电动机赋予规定时间的、作为与刚要检测所述异常负荷之前的伺服电动机的旋转方向相反方向的扭矩且规定的大小的扭矩指令。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2001-037289号公报
技术实现思路
1、本发明要解决的技术问题
2、本发明的主要目的在于,提供一种机器人控制系统,其提高对于机器人的安全功能的可靠性,并且能够容易地进行安全功能的变更。
3、用于解决技术问题的技术方案
4、根据本发明的一个实施方式,提供一种机器人控制系统,其中,具有实现工作中的机器人的安全功能的安全关联部、以及非安全关联部,
5、所述安全关联部具有动作判断部,该动作判断部根据包含与工作中的所述机器人的力以及速度中的至少任一者相关的参数的安全关联输入信号以及预先存储的该参数用的判断基准进行所述机器人的动作的判断,通过根据该动作判断部的判断结果生成安全关联输出信号来实现所述安全功能,
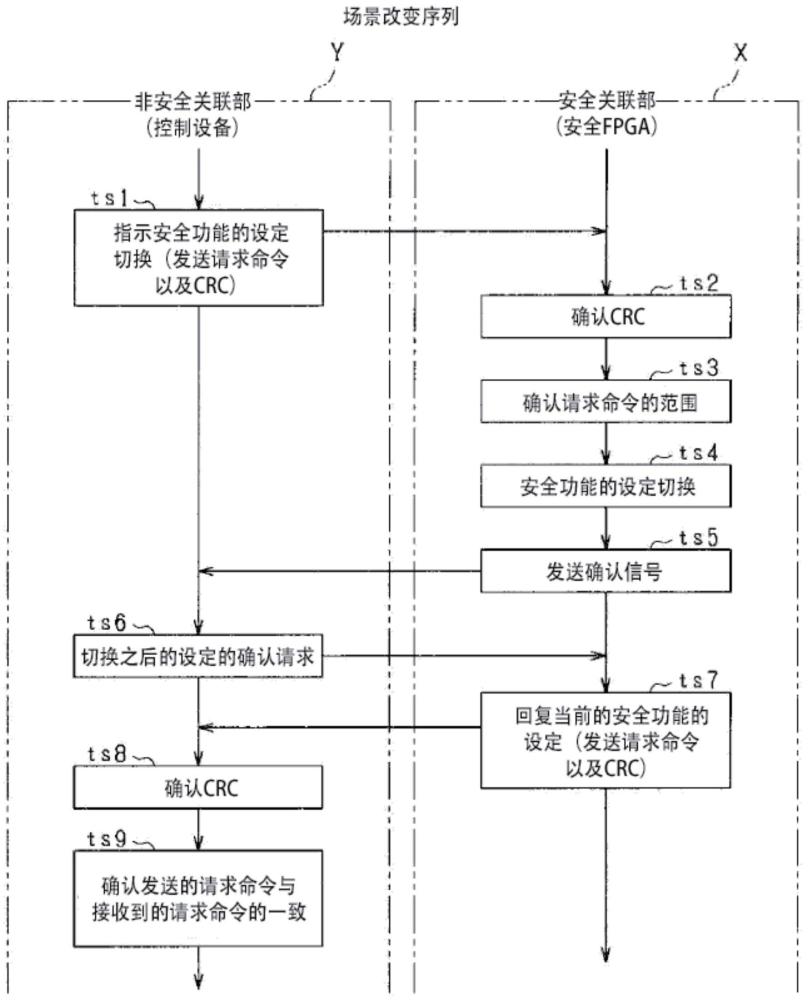
6、所述非安全关联部通过向所述安全关联部发送包含指令信息与第一诊断用信息的信息组,对该安全关联部进行所述判断基准的切换的指示,其中,所述指令信息包含表示要在所述动作判断部的判断中参照的判断基准的信息,
7、所述安全关联部在从所述非安全关联部接收到所述指示的情况下,根据所述第一诊断用信息诊断所述指示是否正常地到达,并根据所述指令信息诊断所述指示本身是否正常,在诊断为所述指示正常地到达并且所述指示本身正常的情况下,受理所述指示并根据所述指令信息切换在所述判断中参照的判断基准,并向所述非安全关联部通知受理了来自所述非安全关联部的指示,
8、所述非安全关联部在被通知了由所述安全关联部受理了所述指示的情况下,向所述安全关联部请求能够通过基于该指示的切换来特定设定为参照对象的所述判断基准的特定用信息,
9、所述安全关联部通过向所述非安全关联部发送包括所述特定用信息与第二诊断用信息的信息组,来响应所述非安全关联部的请求,
10、所述非安全关联部在从所述安全关联部接收到所述响应的情况下,根据所述第二诊断用信息诊断所述响应是否正常地到达,诊断实际上设定的所述判断基准是否为由所述指示指定的所述判断基准。
11、发明的效果
12、根据本发明,能够提供一种机器人控制系统,其提高了对于机器人的安全功能的可靠性,并且能够容易进行安全功能的变更。
技术特征:
1.一种机器人控制系统,其中,
2.根据权利要求1所述的机器人控制系统,其中,
3.根据权利要求2所述的机器人控制系统,其中,
4.根据权利要求1所述的机器人控制系统,其中,
5.根据权利要求1所述的机器人控制系统,其中,
6.根据权利要求1所述的机器人控制系统,其中,
7.根据权利要求1所述的机器人控制系统,其中,
8.根据权利要求1所述的机器人控制系统,其中,
9.根据权利要求1所述的机器人控制系统,其中,
技术总结
本发明提供一种机器人控制系统,其提高对于机器人的安全功能的可靠性,并且能够容易地进行安全功能的变更。具有实现工作中的机器人的安全功能的安全关联部与非安全关联部,非安全关联部通过向安全关联部发送指令信息与第一诊断用信息对安全关联部进行判断基准的切换的指示,安全关联部在指示正常地到达并且诊断为指示本身正常的情况下受理指示并根据指令信息切换判断基准,非安全关联部请求能够特定被设定的判断基准的特定用信息,安全关联部向所述非安全关联部发送特定用信息与第二诊断用信息,非安全关联部根据所述第二诊断用信息诊断响应是否正常地到达,诊断实际上设定的判断基准是否为由所述指示指定的所述判断基准。
技术研发人员:山本智哉
受保护的技术使用者:电装波动株式会社
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!