机器人、机器人的控制装置、以及作业机器人系统的制作方法
本发明涉及机器人、机器人的控制装置、以及作业机器人系统。
背景技术:
1、以往,在将部件组装到由搬运装置搬运的物品时,使搬运装置停止的情况较多。尤其是在将部件精密地组装到汽车的车身等大物品时,需要停止由搬运装置对物品的搬运。有时这也会导致系统效率降低。
2、另一方面,已知一种机器人追踪由搬运装置移动的物品等的机器人系统。例如,参考专利文献1~3。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2011-140084号公报
6、专利文献2:日本特开昭62-241684号公报
7、专利文献3:日本特开2007-090479号公报
技术实现思路
1、发明要解决的问题
2、如上所述,为了提高系统的效率,利用搬运装置等进行移动且机器人对物品进行作业是重要的。此时,根据物品的种类等,有时优选不使机器人的前端部的部件等朝向作业开始位置呈直线状移动。或者,根据物品的种类等,有时无法使机器人的前端部的部件等朝向作业开始位置呈直线状移动。例如,部件等的直线状的移动会导致与物品的接触的情况等。这样,希望一种能够尽可能地避免支撑于机器人的部件或者工具与物品的接触的机器人、机器人的控制装置、以及作业机器人系统。
3、用于解决问题的方案
4、本发明的第一方面是一种机器人,其具备臂、以及控制所述臂的控制装置,并对利用物品移动装置进行移动的物品的对象部进行预定的作业。所述控制装置构成为进行如下经过点追踪控制:在使支撑于所述臂的前端部的部件或者工具移动到所述预定的作业的作业开始位置之前,在一个或者多个经过点中的每一个,控制所述臂进行所述部件或者所述工具对移动的所述物品的追踪。另外,所述控制装置构成为进行如下作业时追踪控制:在所述经过点追踪控制之后,将所述部件或者所述工具配置于所述作业开始位置,并控制所述臂进行所述部件或者所述工具对移动的所述物品的作业时追踪。
5、本发明的第二方面是一种机器人的控制装置,其控制对利用物品移动装置进行移动的物品的对象部进行预定的作业的机器人的臂。该控制装置构成为进行如下经过点追踪控制:在使支撑于所述臂的前端部的部件或者工具移动到所述预定的作业的作业开始位置之前,在一个或者多个经过点中的每一个,控制所述臂进行所述部件或者所述工具对移动的所述物品的追踪。另外,该控制装置构成为进行如下作业时追踪控制:在所述经过点追踪控制之后,将所述部件或者所述工具配置于所述作业开始位置,并控制所述臂进行所述部件或者所述工具对移动的所述物品的作业时追踪。
6、本发明的第三方面是一种作业机器人系统,其具备:物品移动装置,其移动物品;机器人,其具有臂;以及控制装置,其控制所述臂对利用所述物品移动装置进行移动的物品的对象部进行预定的作业。所述控制装置构成为进行如下经过点追踪控制:在使支撑于所述臂的前端部的部件或者工具移动到所述预定的作业的作业开始位置之前,在一个或者多个经过点中的每一个,控制所述臂进行所述部件或者所述工具对移动的所述物品的追踪。另外,所述控制装置构成为进行如下作业时追踪控制:在所述经过点追踪控制之后,将所述部件或者所述工具配置于所述作业开始位置,并控制所述臂进行所述部件或者所述工具对移动的所述物品的作业时追踪。
技术特征:
1.一种机器人,其特征在于,
2.根据权利要求1所述的机器人,其特征在于,
3.根据权利要求1或2所述的机器人,其特征在于,
4.根据权利要求1~3中任一项所述的机器人,其特征在于,
5.根据权利要求1~4中任一项所述的机器人,其特征在于,
6.根据权利要求5所述的机器人,其特征在于,
7.一种机器人的控制装置,其特征在于,
8.根据权利要求7所述的机器人的控制装置,其特征在于,
9.根据权利要求8所述的机器人的控制装置,其特征在于,
10.一种作业机器人系统,其特征在于,具备:
11.根据权利要求10所述的作业机器人系统,其特征在于,
12.根据权利要求10或11所述的作业机器人系统,其特征在于,
13.根据权利要求12所述的作业机器人系统,其特征在于,
技术总结
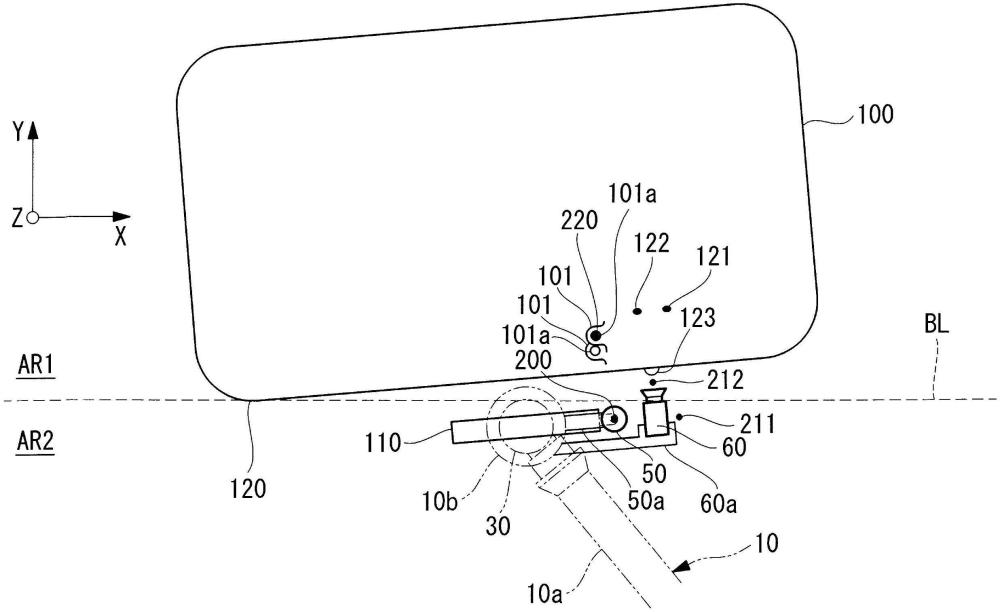
一种机器人(10),其具备臂(10a)以及用于控制其的控制装置,并对通过物品移动装置进行移动的物品(100)的对象部进行预定的作业。所述控制装置进行如下经过点追踪控制:在使支撑于臂(10a)的部件(110)或者工具移动到作业开始位置(220)之前,在一个或者多个经过点(211、212)的每一个,控制臂(10a)进行部件(110)或者工具对移动的物品(100)的追踪。另外,所述控制装置在经过点追踪控制之后,将部件(110)或者工具配置于作业开始位置(220),并控制臂(10a)进行部件(110)或者工具对物品(100)的作业时追踪。
技术研发人员:宫崎航,古贺健太郎
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/12/17
- 还没有人留言评论。精彩留言会获得点赞!