取得工件的位置数据的装置、控制装置、机器人系统、方法以及计算机程序与流程
本公开涉及取得工件的位置数据的装置、控制装置、机器人系统、方法以及计算机程序。
背景技术:
1、已知有如下装置:将工件模型化而得的工件模型与检测工件形状的形状检测传感器的检测数据匹配,由此,取得该工件的位置数据(例如,专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2017-102529号公报
技术实现思路
1、发明要解决的课题
2、以往,存在将工件模型与形状检测传感器的检测数据错误匹配的情况。此时,无法取得准确的工件的位置数据,可能无法准确地执行针对工件的作业。
3、用于解决课题的手段
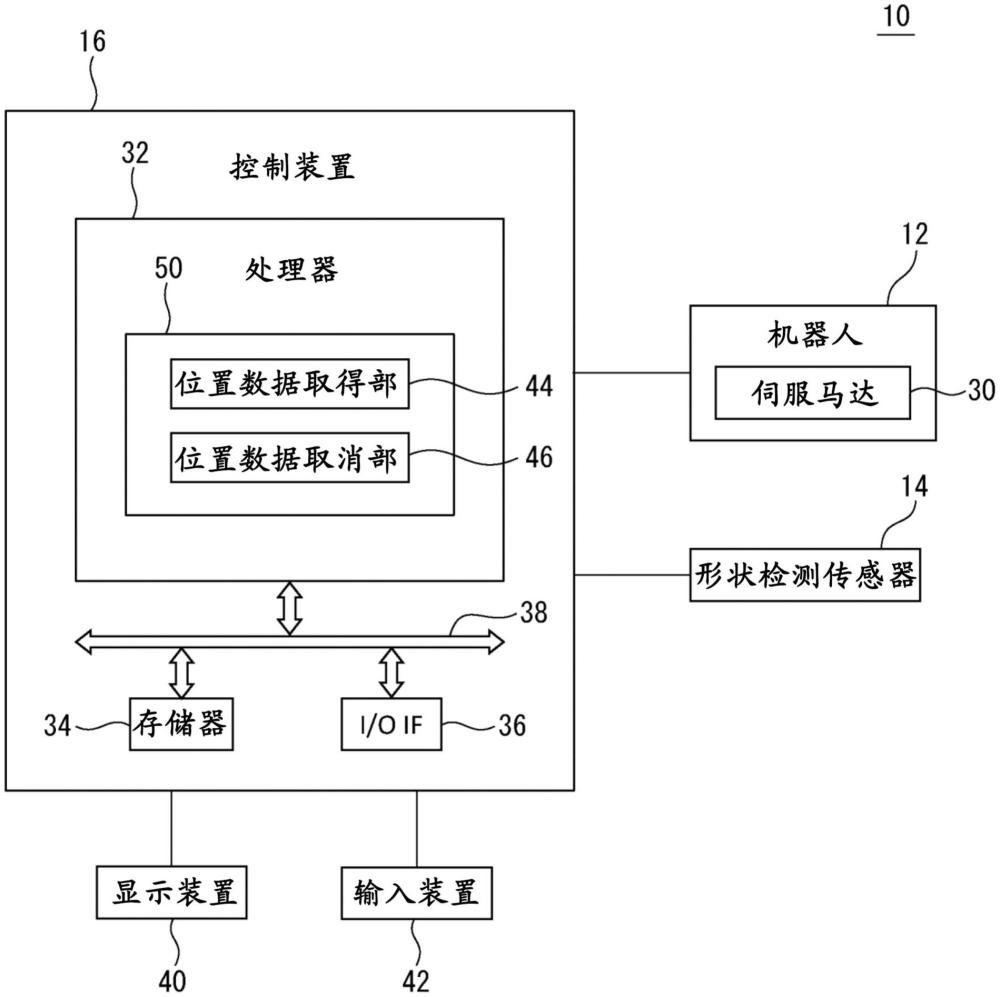
4、在本公开的一方式中,提供一种装置,其根据检测物体以及工件的形状的形状检测传感器的检测数据来取得该工件的位置数据,其中,工件与该物体相邻并具有该物体不能进入的区域,其中,所述装置具有:位置数据取得部,其通过将工件模型与检测数据中包含的工件的形状数据进行匹配,来取得位置数据,其中,工件模型是将工件模型化而得的,且工件模型确定了与不能进入的区域对应的确认区域;以及位置数据取消部,在由位置数据取得部与工件的形状数据进行了匹配的工件模型所确定的确认区域中,存在检测数据中包含的物体的形状数据时,位置数据取消部使位置数据取得部所取得的位置数据无效。
5、在本公开的其他方式中,提供一种方法,用于根据检测物体以及工件的形状的形状检测传感器的检测数据来取得该工件的位置数据,其中,工件与该物体相邻并具有该物体不能进入的区域,其中,处理器进行以下动作:通过将工件模型与检测数据中包含的工件的形状数据进行匹配,来取得位置数据,其中,工件模型是将工件模型化而得的,且工件模型确定了与不能进入的区域对应的确认区域;在与工件的形状数据进行了匹配的工件模型所确定的确认区域中,存在检测数据中包含的物体的形状数据时,使所取得的位置数据无效。
6、发明效果
7、根据本公开,能够避免使用将工件模型与形状数据错误匹配而产生的、作为工件模型与形状数据的失配结果而取得的位置数据,来使机器人执行针对工件的作业。结果,能够提高机器人的作业精度。
技术特征:
1.一种装置,其根据检测物体以及工件的形状的形状检测传感器的检测数据来取得该工件的位置数据,其中,所述工件与该物体相邻并具有该物体不能进入的区域,其特征在于,
2.根据权利要求1所述的装置,其特征在于,
3.根据权利要求1所述的装置,其特征在于,
4.根据权利要求3所述的装置,其特征在于,
5.根据权利要求2~4中任一项所述的装置,其特征在于,
6.根据权利要求2~5中任一项所述的装置,其特征在于,
7.根据权利要求1~6中任一项所述的装置,其特征在于,
8.根据权利要求7所述的装置,其特征在于,
9.根据权利要求7或8所述的装置,其特征在于,
10.根据权利要求1~9中任一项所述的装置,其特征在于,
11.根据权利要求1~10中任一项所述的装置,其特征在于,
12.一种机器人的控制装置,其特征在于,具有:
13.一种机器人系统,其特征在于,具有:
14.一种方法,用于根据检测物体以及工件的形状的形状检测传感器的检测数据来取得该工件的位置数据,其中,所述工件与该物体相邻并具有该物体不能进入的区域,其特征在于,
15.一种计算机程序,其特征在于,
技术总结
以往,存在将工件模型与形状检测传感器的检测数据错误匹配的情况。此时,无法取得准确的工件的位置数据,可能无法准确地执行针对工件的作业。一种根据形状检测传感器(14)的检测数据来取得工件的位置数据的装置(50),其具有:位置数据取得部(44),其通过将工件模型与检测数据中包含的工件的形状数据进行匹配来取得位置数据,其中,工件模型是将工件模型化而得的,且工件模型确定了与不能进入的区域对应的确认区域;位置数据取消部(46),在由位置数据取得部(44)与工件的形状数据进行了匹配的工件模型所确定的确认区域中,存在检测数据中包含的物体的形状数据时,位置数据取消部使位置数据取得部(44)所取得的位置数据无效。
技术研发人员:和田润
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!