一种基于轴向力的可变刚度机构及柔性关节的制作方法
本发明涉及机器人领域,尤其涉及一种基于轴向力的可变刚度机构及柔性关节。
背景技术:
1、同传统柔性关节相比,可变刚度柔性关节可以通过一定的控制策略实现机器人在不同工作状态下关节刚度的变化,这与人类肌肉具有相似的特征,即在普通工作状态下保持较高的刚度,在发生碰撞时能够产生一定的柔顺性,缓解碰撞冲击,防止对接触物造成进一步的伤害。另外,弹性元件的引入使得碰撞时关节可以存储能量,在一定程度上提高了能量的利用效率,因此,可变刚度柔性关节的引入,使得机器人在保证关节运动性能的同时兼具了环境安全性,在当前机械行业具有广阔的应用背景和重要研究意义。
2、专利号为201711239915.8的专利中,提供了一种基于片簧的变刚度柔性关节,目的是解决可变刚度柔性关节结构复杂、体积大、控制过程繁杂及刚度线性控制难的问题,包括:输入轴(1)、输出轴(2)、刚度调整机构(3)、位移检测系统(4)、控制系统(5)和限位保护机构(6);所述输入轴(1)包括第一输入轴(1-1)和第二输入轴(1-2),所述第一输入轴(1-1)与第二输入轴(1-2)同心连接,所述第二输入轴(1-2)为正方形板状结构,其四角处分别镜像设置有双曲面凹槽;所述输出轴(2)包括第一输出轴(2-1)、第二输出轴(2-2)、输出端盖(2-3),所述第一输出轴(2-1)和第二输出轴(2-2)均为一端封闭的筒状结构,所述的第二输出轴(2-2)的封闭端设置有沿圆周等距离分布并向圆心方向延伸的滑槽组(2-4),所述第一输出轴(2-1)、第二输出轴(2-2)、输出端盖(2-3)依次扣合固定;所述刚度调整机构(3)包括控制电机(3-1)、调度盘(3-2)、连杆组(3-3)、片簧组(3-4)和滑块组(3-5)。这种方案需要一个刚度调节电机(3-1),通过调度盘(3-2)、连杆组(3-3)、片簧组(3-4)和滑块组(3-5)等机构实现刚度调节,机构仍然较复杂。
技术实现思路
1、针对现有技术的不足,本发明提出一种基于轴向力的可变刚度机构及柔性关节。
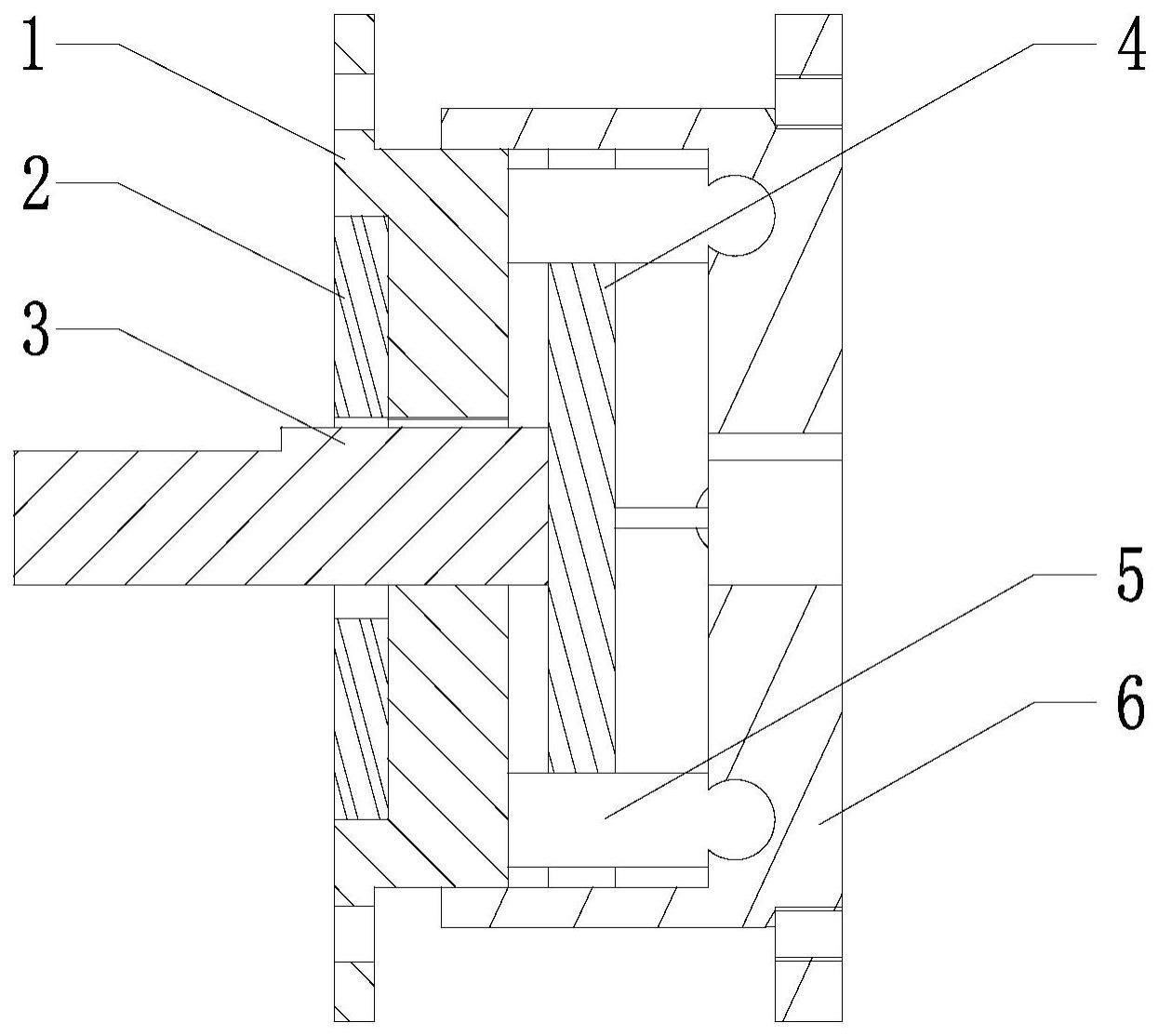
2、为了实现上述发明目的,本发明采用了以下技术方案:一种基于轴向力的可变刚度机构,包括基座、动力单元、驱动杆、刚度调节件、簧片和关节输出端;所述动力单元固定设于所述基座上,通过驱动杆与刚度调节件连接,所述刚度调节件开有用于约束簧片的簧片约束孔,并位于基座和关节输出端之间;所述簧片的一端与基座连接,另一端与关节输出端活动连接。
3、进一步地,所述簧片至少有两个,绕驱动杆均匀布置;所述簧片的一端穿过所述簧片约束孔固设于基座上,另一端穿过所述簧片约束孔铰接于关节输出端上。
4、进一步地,所述簧片的另一端穿过所述簧片约束孔优选通过球铰与关节输出端连接。
5、进一步地,所述基座上设有关节输出端约束轴;所述关节输出端上对应设有关节输出端约束孔,以保证关节输出端相对基座同轴转动。
6、进一步地,所述基座开有键槽;所述驱动杆对应设有键,以防止驱动杆轴向转动;所述驱动杆的一端端部与刚度调节件活动连接。
7、进一步地,所述动力单元为电磁铁、气缸或液压缸;所述驱动杆为铁芯或活塞杆。
8、进一步地,所述驱动杆为螺杆;所述刚度调节件上开有与螺杆对应的螺纹孔;所述螺杆穿过螺纹孔与刚度调节件固定连接。
9、进一步地,所述基座上还设有导向销;所述刚度调节件上开有与导向销配合的导向孔,以保证所述刚度调节件通过导向销与基座同步转动。
10、本发明提出了一种基于轴向力的柔性关节,包括上述的可变刚度机构、关节电机和刚度调节电机;所述刚度调节电机与关节电机连接;所述关节电机设有电机输出端;所述可变刚度机构的基座与电机输出端固定连接。
11、进一步地,所述可变刚度机构的驱动杆为螺杆,所述螺杆与刚度调节电机连接,所述关节电机和刚度调节电机上对应第一滑道和第一滑轨,所述第一滑道与第一滑轨配合;所述螺杆的端部与刚度调节件转动连接。
12、与现有技术相比,采用了上述技术方案的可变刚度机构及柔性关节,具有如下有益效果:
13、1、采用本发明的一种基于轴向力的可变刚度机构及柔性关节,将动力单元沿关节电机轴线布局,缩小了可变刚度柔性关节的直径;
14、2、采用本发明的一种基于轴向力的可变刚度机构及柔性关节,打破了以电机为变刚度机构动力源的技术路线;
15、3、采用本发明的一种基于轴向力的可变刚度机构及柔性关节,由于驱动单元(电磁铁、气缸或液压缸)和驱动轴(铁芯、活塞杆)之间类似柱面约束,电磁铁可以设置在关节电机输出端上相对关节电机外壳转动,也可以设在关节电机上相对关节电机静置,这就给可变刚度机构的动力源提供了更灵活的布局方式选择;
16、4、采用本发明的一种基于轴向力的可变刚度机构及柔性关节,由于电磁铁定制相对容易,且外形不受限制,不仅可以实现让用户低成本定制,而且让可以让电磁铁内嵌到关节电机中,实现柔性关节的一体化设计。
技术特征:
1.一种基于轴向力的可变刚度机构,其特征在于:包括基座(1)、动力单元、驱动杆、刚度调节件(4)、簧片(5)和关节输出端(6);所述动力单元固定设于所述基座(1)上,通过驱动杆与刚度调节件(4)连接,所述刚度调节件(4)开有用于约束簧片(5)的簧片约束孔(401),并位于基座(1)和关节输出端(6)之间;所述簧片(5)的一端与基座(1)连接,另一端与关节输出端(6)活动连接。
2.如权利要求1所述的基于轴向力的可变刚度机构,其特征在于:所述簧片(5)至少有两个,绕驱动杆均匀布置;所述簧片(5)的一端穿过所述簧片约束孔(401)固设于基座(1)上,另一端穿过所述簧片约束孔(401)铰接于关节输出端(6)上。
3.如权利要求2所述的基于轴向力的可变刚度机构,其特征在于:所述簧片(5)的另一端穿过所述簧片约束孔(401)通过球铰与关节输出端(6)连接。
4.如权利要求1所述的基于轴向力的可变刚度机构,其特征在于:所述基座(1)上设有关节输出端约束轴(102);所述关节输出端(6)上对应设有关节输出端约束孔(603),以保证关节输出端(6)相对基座(1)同轴转动。
5.如权利要求1所述的基于轴向力的可变刚度机构,其特征在于:所述基座(1)开有键槽(101);所述驱动杆对应设有键(301),以防止驱动杆轴向转动;所述驱动杆的一端端部与刚度调节件(4)活动连接。
6.如权利要求5所述的基于轴向力的可变刚度机构,其特征在于:所述动力单元为电磁铁、气缸或液压缸;所述驱动杆为铁芯或活塞杆。
7.如权利要求1所述的基于轴向力的可变刚度机构,其特征在于:所述基座(1)上还设有导向销(103);所述刚度调节件(4)上开有与导向销(103)配合的导向孔(402),以保证所述刚度调节件(4)通过导向销(103)与基座(1)同步转动。
8.一种基于轴向力的柔性关节,其特征在于,包括权利要求1-7任一项所述的可变刚度机构、关节电机(8)和刚度调节电机(9);所述刚度调节电机(9)与关节电机(8)连接;所述关节电机(8)设有电机输出端(801);所述可变刚度机构的基座(1)与电机输出端(801)固定连接。
技术总结
本发明公开了一种基于轴向力的可变刚度机构及柔性关节,解决了柔性关节刚度调节机构复杂、体积臃肿的问题,所述可变刚度机构包括基座、动力单元、驱动杆、刚度调节件、簧片和关节输出端,所述动力单元固定设于所述基座上,通过驱动杆与刚度调节件连接,所述刚度调节件设有用于约束簧片的簧片约束孔,并设于基座和关节输出端之间,所述簧片至少有两个,一端固设于基座上,另一端铰接于关节输出端上,并穿过所述簧片约束孔,达到了减小刚度调节机构体积的目的。
技术研发人员:陈令凯,张兰,赵鹏宇,陈星宇,姚运昌,黄冠宇,孔令雨,谢安桓,张丹
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!