一种用于物资盘点的智能机器人的制作方法
本发明涉及机器人,特别涉及一种用于物资盘点的智能机器人。
背景技术:
1、目前,物资装备盘点和巡检主要依赖人工手动方式,不仅速度慢、准确率低,同时还存在企业物资盘点中投入的人员成本大,识别效率低、清查工作存在安全隐患等问题,因此,人们将智能机器人应用到物资盘点领域,来解决上述问题。
2、在智能机器人投入到物资盘点领域时,如何实现对智能机器人的任务管理、物资识别、远程指挥,实现智能机器人在物资盘点的有效清算是急需解决的问题。
技术实现思路
1、本发明提供一种用于物资盘点的智能机器人,实现智能机器人在物资盘点的有效清算。
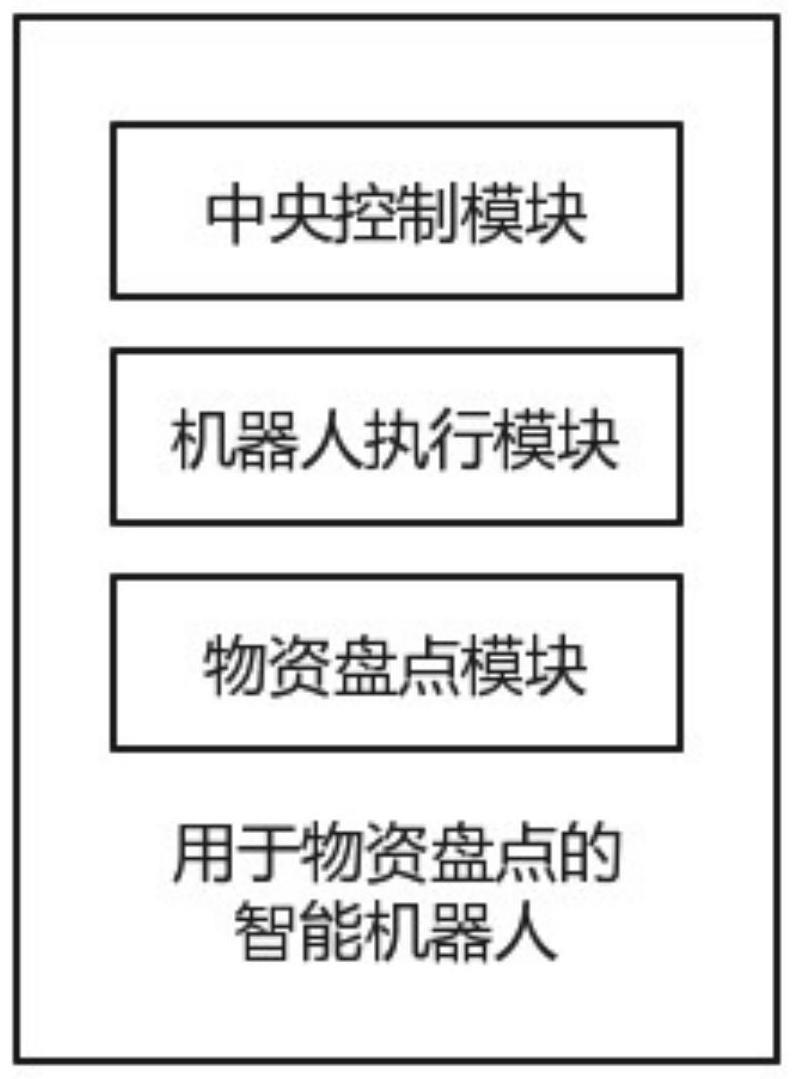
2、一种用于物资盘点的智能机器人,包括:
3、中央控制模块,用于接收来自机器人执行模块和物资盘点模块的机器人信息,并基于机器人信息进行分析处理,确定对机器人的执行任务;
4、机器人执行模块,用于基于所述执行任务,驱动机器人进行移动;
5、物资盘点模块,用于在机器人移动过程中,利用rfid超高频识别技术,对物资进行统计记录。
6、优选的,还包括:数据传输模块,用于实现中央控制模块和机器人执行模块的之间的数据传输。
7、优选的,所述中央控制模块,包括:
8、接收单元,用于每隔预设时间接收来自机器人执行模块的移动信息以及来自物资盘点模块的图像识别信息;
9、数据确定单元,用于基于所述移动信息确定机器人的位置、移动路径、移动方向,基于所述图像识别信息确定机器人周围的物资数量和物资位置;
10、任务确定单元,用于获取总任务目标,结合所述机器人的位置、移动路径、移动方向、机器人周围的物资数量和物资位置,为所述机器人分配执行任务。
11、优选的,所述中央控制模块,还包括:
12、评价单元,用于按照区域,对执行任务进行划分,得到多个子任务,并基于机器人的位置对多个子任务进行评价,得到评价值;
13、约束单元,用于基于所述执行约束规则,确定多个子任务中必须存在满足先后顺序的约束子任务,并为所述约束子任务设置局部优先级顺序;
14、优先级设置单元,用于按照对多个子任务的评价值,结合所述局部优先级顺序,确定对多个子任务的初始优先级顺序;
15、评估调整单元,用于根据执行任务的具体需求,对所述初始优先级顺序进行评估,并根据评估结果进行调整。
16、优选的,所述评价单元,包括:
17、区域划分单元,用于对所述执行任务按照区域进行划分,得到多个子任务,获取各个子任务对应的执行区域;
18、任务分析单元,用于对多个子任务进行任务分析,确定机器人执行多个子任务的预设执行路径、执行时长,以及多个子任务之间的执行约束规则;
19、评价值确定单元,用于基于机器人的当前位置与执行区域的距离确定距离影响值,基于执行路径确定路径影响值,根据距离影响值和路径影响值确定对多个子任务的评价值;
20、优选的,所述评估调整单元,包括:
21、指标权重确定单元,用于获取在所述初始优先级顺序下的相邻两个子任务的子任务切换的耗费资源和耗费时长,根据执行任务的具体需求,为所述评价值、耗费资源和耗费时长设置不同的权重;
22、优先级调整单元,用于利用所述权重,对所述初始优先级顺序进行综合评估,得到综合评估值,并判断所述评估值是否大于预设评估值;
23、若是,按照所述初始优先级顺序确定执行任务的执行规则;
24、否则,根据所述评估值和预设评估值的差值、权重和局部优先级顺序建立优先级调整模型,对所述初始优先级顺序进行调整,得到大于预设评估值的调整后的优先级顺序,并按照所述调整后的优先级顺序确定执行任务的执行规则。
25、优选的,所述机器人执行模块,包括:
26、路径确定单元,用于基于所述执行任务,确定机器人的移动路径;
27、驱动控制单元,用于基于所述移动路径,确定机器人的电机和车轮的驱动指令,基于所述驱动指令,控制机器人进行移动;
28、避障单元,用于根据机器人在移动过程中的周围图像,结合红外传感数据,判断在所述移动路径中是否会发生碰撞,并在确定发生碰撞后,立即更改移动路径进行避障。
29、优选的,所述物资盘点模块,包括:
30、标签识别单元,用于在机器人移动到达巡检点时,识别在巡检点上的巡检点标签和物资摆放标签,并基于物资摆放标签的正确性,得到第一rfid标签和第二rfid标签;
31、盘点单元,用于基于所述第一rfid标签和第二rfid标签对巡检点进行物资盘点,得到盘点结果;
32、统计记录单元,用于从物资数据库中获取与巡检点标签匹配的物资记录数据,根据所述盘点结果对所述物资记录数据进行更新,实现对物资的统计记录。
33、优选的,所述标签识别单元,包括:
34、标签获取单元,用于在机器人移动到达巡检点时,识别在巡检点上的巡检点标签和物资摆放标签;
35、rfid标签识别单元,用于基于所述物资摆放标签确定机器人的巡检路径和巡检位置,并按照所述巡检路径对巡检位置进行扫描,判断所述巡检位置是否摆放物资;
36、若是,确定所述物资摆放标签的信息正确,并按照物资摆放标签的巡检位置对物资进行rfid超高频识别,得到第一rfid标签;
37、否则,确定所述物资摆放标签的信息错误,重新规划巡检路径进行识别,确定新的巡检位置,并对物资进行rfid超高频识别,得到第二rfid标签,且按照新的巡检位置对巡检点标签进行更新。
38、优选的,所述盘点单元,包括:
39、第一盘点单元,用于基于第一rfid标签得到的物资信息,对巡检点进行物资盘点,得到盘点结果;
40、第二盘点单元,用于基于第二rfid标签得到的物资信息,对巡检点进行物资盘点,得到第一盘点数据,按照rfid标签识别单元重新对巡检点进行物资盘点,得到第二盘点数据,并判断所述第一盘点数据和第二盘点数据是否一致;
41、若是,将所述第一盘点数据作为盘点结果;
42、否则,继续按照rfid标签识别单元重新对巡检点进行物资盘点,直到前后两次物资盘点数据一致,将最新的物资盘点作为盘点结果。
43、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
44、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种用于物资盘点的智能机器人,其特征在于,包括:
2.根据权利要求1所述的一种用于物资盘点的智能机器人,其特征在于,还包括:数据传输模块,用于实现中央控制模块和机器人执行模块的之间的数据传输。
3.根据权利要求1所述的一种用于物资盘点的智能机器人,其特征在于,所述中央控制模块,包括:
4.根据权利要求1所述的一种用于物资盘点的智能机器人,其特征在于,所述中央控制模块,还包括:
5.根据权利要求4所述的一种用于物资盘点的智能机器人,其特征在于,所述评价单元,包括:
6.根据权利要求4所述的一种用于物资盘点的智能机器人,其特征在于,所述评估调整单元,包括:
7.根据权利要求1所述的一种用于物资盘点的智能机器人,其特征在于,所述机器人执行模块,包括:
8.根据权利要求1所述的一种用于物资盘点的智能机器人,其特征在于,所述物资盘点模块,包括:
9.根据权利要求8所述的一种用于物资盘点的智能机器人,其特征在于,所述标签识别单元,包括:
10.根据权利要求8所述的一种用于物资盘点的智能机器人,其特征在于,所述盘点单元,包括:
技术总结
本发明提供了一种用于物资盘点的智能机器人,包括:中央控制模块,用于接收来自机器人执行模块和物资盘点模块的机器人信息,并基于机器人信息进行分析处理,确定对机器人的执行任务;机器人执行模块,用于基于所述执行任务,驱动机器人进行移动;物资盘点模块,用于在机器人移动过程中,利用RFID超高频识别技术,对物资进行统计记录;通过设计机器人的执行任务,保证机器人工作效率,同时,在机器人移动过程中,利用RFID超高频识别技术,对物资进行统计记录,保证物资盘点的准确性,实现指挥部远程控制机器人执行物资盘点操作。
技术研发人员:董晓英,付海涛,黎海凡,朱晓觅,徐承,徐云生,肖宇,何小勇,陈永雷,李晨
受保护的技术使用者:中国长江电力股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!