一种精准夹取的机械装置
本发明涉及机械手臂的,特别是一种精准夹取的机械装置。
背景技术:
1、机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
2、目前市面上常见的工业机械手根据手臂的动作形态按坐标形式大致可分直角坐标型机械手、圆柱坐标型机械手、球坐标型机械手、多关节型机械手等多种。这些机械臂多为二维空间内运动,工作空间有限,为此发明人提出了一种精准夹取的机械装置。
技术实现思路
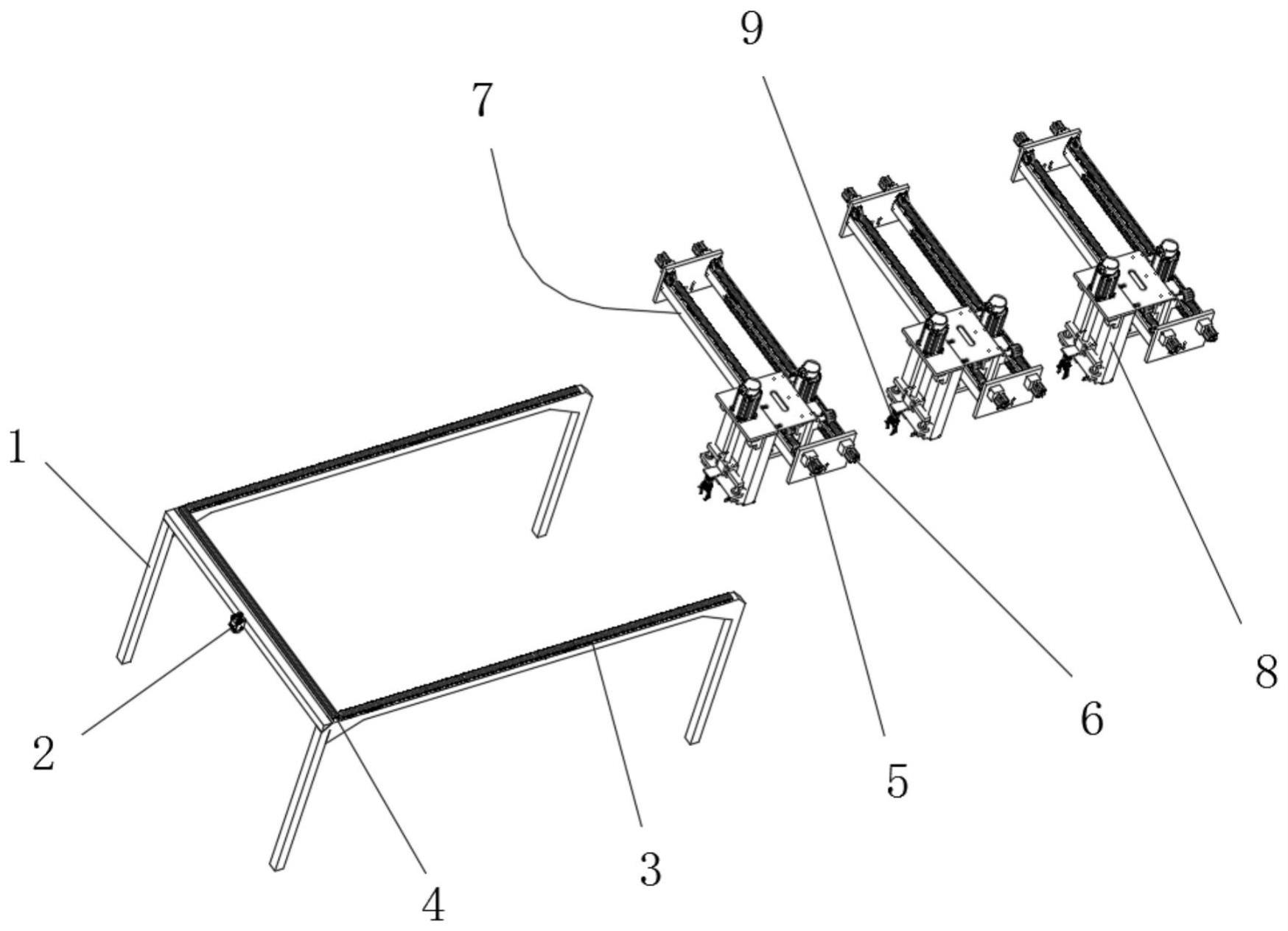
1、本发明提供的一种精准夹取的机械装置,包括安装架,所述安装架前端设有图像采集装置,其特征在于,所述安装架上设有一组第一齿条,所述第一齿条前端设有限位档杆,所述第一齿条上设有一组二维机械臂,所述二维机械臂的两端设有一组第一转动电机,所述第一转动电机的输出端固定连接第一传动齿轮,所述第一传动齿轮和所述第一齿条啮合连接;
2、所述二维机械臂包括横向输送装置和升降输送装置,所述横向输送装置的输出端固定连接所述升降输送装置,所述升降输送装置的输出端固定连接夹取机械手。
3、优选地,所述横向输送装置包括第一安装条和第二安装条,所述第一安装条和第二安装条上侧设有第二齿条,所述第二安装条的侧壁上设有第三齿条,所述第一安装条和第二安装条之间设有电机固定架,所述电机固定架上侧设有第二转动电机,所述第二转动电机的输出端设有第二传动齿轮,所述第二传动齿轮和所述第三齿条啮合连接,所述电机固定架的前后两端转动连接第三传动齿轮,所述第三传动齿轮设置在所述第二齿条上侧且与第二齿条啮合连接,所述第一电机安装架上还设有升降输送装置。
4、优选地,所述第一安装条和所述第二安装条的左右两端均设有挡板,所述挡板上固定连接第一转动电机。
5、优选地,所述升降输送装置包括第二电机安装架,所述第二电机安装架的上侧设有第三转动电机,所述第三转动电机的输出端固定连接传动螺杆,所述传动螺杆转动连接在所述第二电机安装架内部,所述传动螺杆的外侧设有夹取装置固定座,所述夹取装置固定座与所述传动螺杆啮合连接,所述夹取装置固定座下侧设有夹取机械手。
6、优选地,夹取装置固定座的下侧设有一组缓冲块。
7、优选地,所述夹取机械手包括伸缩缸安装座,所述伸缩缸安装座内设有伸缩缸,所述伸缩缸输出端向下,所述伸缩缸安装座两侧对称设有夹爪固定块,所述夹爪固定块下侧转动连接夹持臂,所述夹持臂下侧转动连接夹爪,所述夹持臂上设有连接臂,所述连接臂一端转动伸缩缸的输出端,所述连接臂的另一端与所述夹持臂转动连接。
8、优选地,所述伸缩缸为液压缸。
9、优选地,所述图像采集装置为摄像头。
10、本发明的有益效果:本发明操作简单,可以通过图像采集装置实现自动定位,维护方便,可操作性强,同时本发明采用了较为简单的结构,实现了机械手的三维度自由运动。结构简单便于维修,其次本发明利用滑轨固定机械手的方式,保证了其结构的牢固性,使得机械手在工作过程中不会左右转动,从而达到准确调整物品位置的目的。
技术特征:
1.一种精准夹取的机械装置,包括安装架,所述安装架前端设有图像采集装置,其特征在于,所述安装架上设有一组第一齿条,所述第一齿条前端设有限位档杆,所述第一齿条上设有一组二维机械臂,所述二维机械臂的两端设有一组第一转动电机,所述第一转动电机的输出端固定连接第一传动齿轮,所述第一传动齿轮和所述第一齿条啮合连接;
2.根据权利要求1所述的一种精准夹取的机械装置,其特征在于:所述横向输送装置包括第一安装条和第二安装条,所述第一安装条和第二安装条上侧设有第二齿条,所述第二安装条的侧壁上设有第三齿条,所述第一安装条和第二安装条之间设有电机固定架,所述电机固定架上侧设有第二转动电机,所述第二转动电机的输出端设有第二传动齿轮,所述第二传动齿轮和所述第三齿条啮合连接,所述电机固定架的前后两端转动连接第三传动齿轮,所述第三传动齿轮设置在所述第二齿条上侧且与第二齿条啮合连接,所述第一电机安装架上还设有升降输送装置。
3.根据权利要求2所述的一种精准夹取的机械装置,其特征在于:所述第一安装条和所述第二安装条的左右两端均设有挡板,所述挡板上固定连接第一转动电机。
4.根据权利要求1所述的一种精准夹取的机械装置,其特征在于:所述升降输送装置包括第二电机安装架,所述第二电机安装架的上侧设有第三转动电机,所述第三转动电机的输出端固定连接传动螺杆,所述传动螺杆转动连接在所述第二电机安装架内部,所述传动螺杆的外侧设有夹取装置固定座,所述夹取装置固定座与所述传动螺杆啮合连接,所述夹取装置固定座下侧设有夹取机械手。
5.根据权利要求4所述的一种精准夹取的机械装置,其特征在于:夹取装置固定座的下侧设有一组缓冲块。
6.根据权利要求1所述的一种精准夹取的机械装置,其特征在于:所述夹取机械手包括伸缩缸安装座,所述伸缩缸安装座内设有伸缩缸,所述伸缩缸输出端向下,所述伸缩缸安装座两侧对称设有夹爪固定块,所述夹爪固定块下侧转动连接夹持臂,所述夹持臂下侧转动连接夹爪,所述夹持臂上设有连接臂,所述连接臂一端转动伸缩缸的输出端,所述连接臂的另一端与所述夹持臂转动连接。
7.根据权利要求6所述的一种精准夹取的机械装置,其特征在于:所述伸缩缸为液压缸。
8.根据权利要求1所述的一种精准夹取的机械装置,其特征在于:所述图像采集装置为摄像头。
技术总结
本发明提供一种精准夹取的机械装置,包括安装架,安装架前端设有图像采集装置,其特征在于,安装架上设有一组第一齿条,第一齿条前端设有限位档杆,第一齿条上设有一组二维机械臂,二维机械臂的两端设有一组第一转动电机,第一转动电机的输出端固定连接第一传动齿轮,第一传动齿轮和第一齿条啮合连接,二维机械臂包括横向输送装置和升降输送装置,横向输送装置的输出端固定连接升降输送装置,升降输送装置的输出端固定连接夹取机械手。本发明操作简单,维护方便,可操作性强,结构简单便于维修,牢固性强在工作过程中不会左右转动,从而达到准确调整物品位置的目的。
技术研发人员:谢文彬,覃上德,陈辰,高辉,张红芳,艾子健,谢永阳,马豪,邱思杰,魏剑,熊昌炯,纪联南,廖宏清,马应龙,陈思颖,黎靖洁,雷颖宁,陈茹萍,张达,余倩雯,杨评委
受保护的技术使用者:三明学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!