一种电气自动化多方位可调式机械臂
本发明涉及工业机械臂,尤其涉及一种电气自动化多方位可调式机械臂。
背景技术:
1、机械臂的运动能力由关节保证。两个相邻连杆的连接可以通过移动关节或旋转关节实现。在一个开式运动链中,每一个移动关节或转动关节都为机械结构提供一个自由度。移动关节可以实现两个连杆之间的相对平移,而旋转关节可以实现两个连杆之间的相对转动(旋转关节相较移动关节更为简捷可靠)。而在闭式运动链中,由于闭环带来的约束,自由度要少于关节数。
2、专利申请公布号cn210910086u的发明专利公开了一种多自由度可调式机械臂,属于机械臂的技术领域。包括:基座,安装在所述基座内的旋转组件,传动连接于所述旋转组件的旋转座,铰接于所述旋转座上的大臂,铰接于所述大臂顶端的小臂,设置在所述小臂内的回转组件,以及传动连接于所述回转组件的夹取模块;本实用新型在现有技术机械臂的小臂上设置能够实现夹取模块多个角度转动甚至是自转功能的回转组件,增大了夹取模块的运动所能覆盖的范围,增加其灵活性。
3、但是其在实际使用时,仍旧存在以下缺点:夹持爪在夹取货物的过程中,承载货物重量的其实就是夹爪与货物之间的摩擦力,而夹爪又是一个连杆类的结构,也就是说,夹爪所所受到的反作用力会作用到连接转轴的位置处,造成对连接转轴处承载力较大,造成机械磨损更大,且发热较其他位置更高。为此,我们提出了一种电气自动化多方位可调式机械臂来解决上述问题。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种电气自动化多方位可调式机械臂,通过油囊实现定时供油的效果,将油囊内部储存的润滑油定时输送至输油管中,之后通过输油管输送至油筒中进行储存,之后再顺着滴油管向夹持爪供油,以解决上述背景技术中提出的问题。
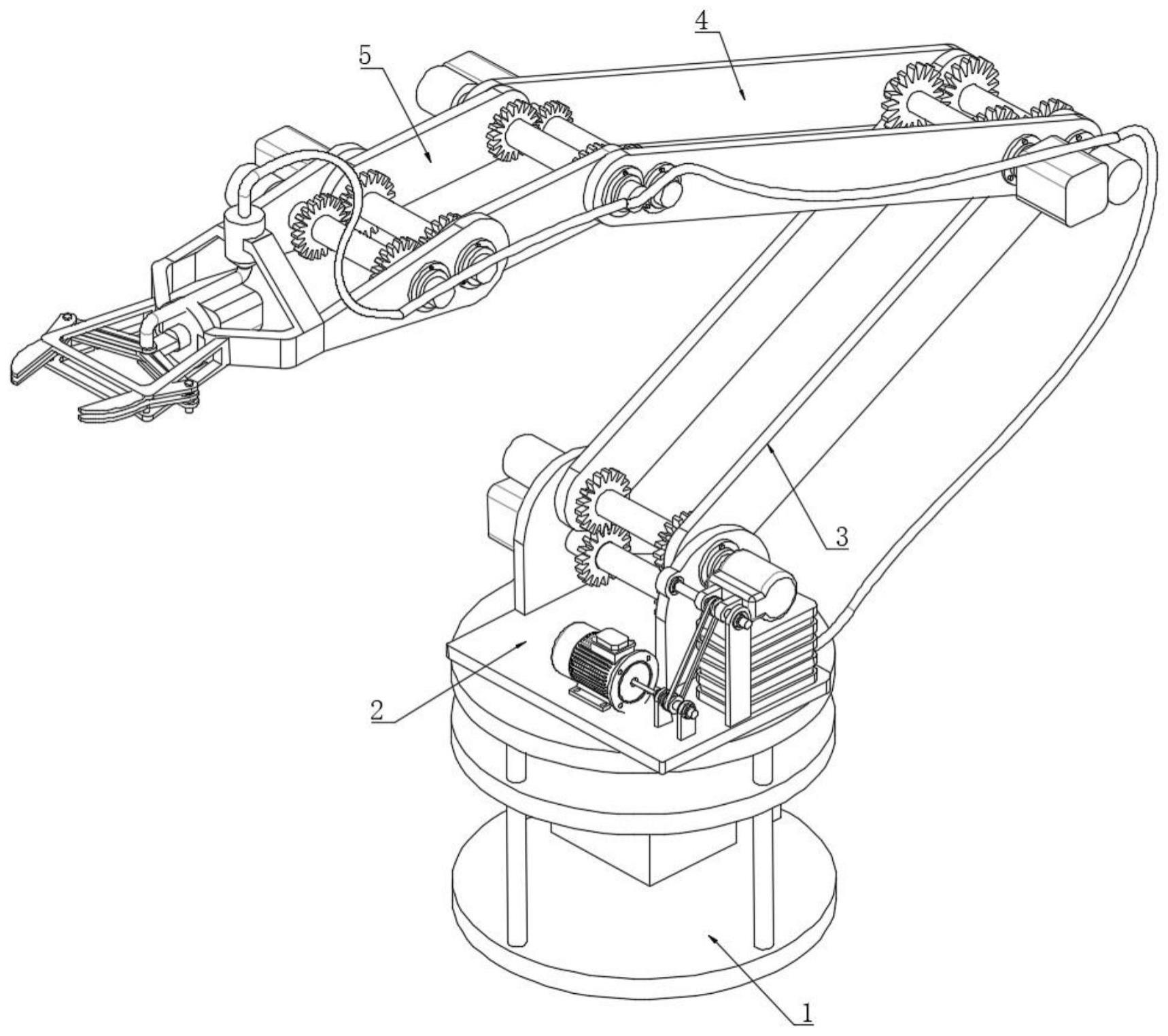
2、为了实现上述目的,本发明采用了如下技术方案:一种电气自动化多方位可调式机械臂,包括机械臂基座,所述机械臂基座的中部位置处安装转向舵机,转向舵机的输出端连接旋转底盘,旋转底盘的顶端以首尾相连的方式依次连接第一连接臂、第二连接臂、第三连接臂和夹持爪,连接位置处均安装有舵机组件。
3、在一个优选地实施方式中,所述舵机组件包括第一连接轴和第二连接轴,第一连接轴的两端部均安装有第一驱动齿轮,第二连接轴的两端部对应第一驱动齿轮的位置处均安装有第二驱动齿轮,第一连接轴的一端部连接第一伺服电机的输出端,第一连接轴的另一端部通过轴承与旋转底盘转动连接,第二连接轴的一端部连接舵机的输出端,第二连接轴的另一端部通过轴承与旋转底盘转动连接。
4、在一个优选地实施方式中,所述旋转底盘的上方安装油囊,油囊的底部一侧开设出油口,出油口通过密封轴承连接输油管,输油管沿着第一连接臂、第二连接臂、第三连接臂和夹持爪依次延伸并最终连接与夹持爪。
5、在一个优选地实施方式中,所述油囊的上方设置有挤压块,挤压块的内部中空设置,挤压块的一侧安装可以转动的第四连接轴,第四连接轴与挤压块固定连接。
6、在一个优选地实施方式中,所述旋转底盘的上方安装第二伺服电机,第二伺服电机的输出端固定连接第一皮带轮,第一皮带轮与第四连接轴之间通过传动组件连接。
7、在一个优选地实施方式中,所述传动组件包括安装在第三连接轴外部的第一皮带轮和安装在第四连接轴外部的第二皮带轮,第一皮带轮和第二皮带轮之间通过传动皮带传动连接,第三连接轴通过传动组件带动第四连接轴转动。
8、在一个优选地实施方式中,所述夹持爪的中部安装有用以调节夹紧程度的爪舵机,所述输油管靠近夹持爪的端部连接油筒,油筒通过斜撑板安装在夹持爪的上方,油筒的底端连接弧形的滴油管,滴油管的滴油口位于夹持爪。
9、在一个优选地实施方式中,所述夹持爪包括弧形连接杆、异形固定杆、连杆和夹爪件,所述弧形连接杆的数量设置成两个,两个弧形连接杆分别与第三连接臂的两块侧板相固定,两块弧形连接杆之间通过圆板固定连接,异形固定杆的中部两侧分别安装两组连杆,每组连杆的数量均设置成两个,连杆的一端部通过转轴与夹爪件传动连接,两组夹爪件对称分布,两组连杆交汇于爪舵机的输出端并通过连接轴传动连接。
10、在一个优选地实施方式中,所述连杆的中部开设有供油流过的输油槽,输油槽的两端部圆孔贯穿连杆。
11、与现有技术相比,本发明的有益效果为:
12、1、通过本发明设计的整体结构,与现有技术中机械爪长期抓取货物相比,本发明可以利用油囊实现定时供油的效果,将油囊内部储存的润滑油定时输送至输油管中,之后通过输油管输送至油筒中进行储存,之后再顺着滴油管向夹持爪供油,通过润滑油对夹持爪各个部件进行润滑,从而减小承载力较大的部件受到的机械磨损,还减少摩擦力降低发热。
13、2、通过设置传动组件,利用第二伺服电机输出端的转动,通过传动组件带动挤压块转动,第四连接轴每转动一圈带动挤压块转动一圈,利用挤压块 的转动实现定时挤压的操作,油囊具有弹性,挤压后会复位,从而方便挤压块在下一圈转动时挤压,因而油囊重复被挤压和复位的功能,实现将润滑油供给进输油管的作用。
14、3、通过本发明设计的输油槽,输油槽开设在连杆内部,两侧的圆孔分别与两个连接转轴的轴部位置靠近,从而使得连接转轴和输油槽连成一个整体,当润滑油从滴油管进入到夹持爪中后,首先进入到连接转轴的位置处对轴承进行润滑,之后润滑油继续向外,浸入中最终对连杆两端部的连接转轴均进行润滑。
技术特征:
1.一种电气自动化多方位可调式机械臂,包括机械臂基座(1),其特征在于:所述机械臂基座(1)的中部位置处安装转向舵机,转向舵机的输出端连接旋转底盘(2),旋转底盘(2)的顶端以首尾相连的方式依次连接第一连接臂(3)、第二连接臂(4)、第三连接臂(5)和夹持爪(6),连接位置处均安装有舵机组件。
2.根据权利要求1所述的一种电气自动化多方位可调式机械臂,其特征在于:所述舵机组件包括第一连接轴(7)和第二连接轴(8),第一连接轴(7)的两端部均安装有第一驱动齿轮(9),第二连接轴(8)的两端部对应第一驱动齿轮(9)的位置处均安装有第二驱动齿轮(10),第一连接轴(7)的一端部连接第一伺服电机(11)的输出端,第一连接轴(7)的另一端部通过轴承与旋转底盘(2)转动连接,第二连接轴(8)的一端部连接舵机(12)的输出端,第二连接轴(8)的另一端部通过轴承与旋转底盘(2)转动连接。
3.根据权利要求1所述的一种电气自动化多方位可调式机械臂,其特征在于:所述旋转底盘(2)的上方安装油囊(20),油囊(20)的底部一侧开设出油口,出油口通过密封轴承连接输油管(21),输油管(21)沿着第一连接臂(3)、第二连接臂(4)、第三连接臂(5)和夹持爪(6)依次延伸并最终连接与夹持爪(6)。
4.根据权利要求3所述的一种电气自动化多方位可调式机械臂,其特征在于:所述油囊(20)的上方设置有挤压块(19),挤压块(19)的内部中空设置,挤压块(19)的一侧安装可以转动的第四连接轴(14),第四连接轴(14)与挤压块(19)固定连接。
5.根据权利要求4所述的一种电气自动化多方位可调式机械臂,其特征在于:所述旋转底盘(2)的上方安装第二伺服电机(18),第二伺服电机(18)的输出端固定连接第一皮带轮(15),第一皮带轮(15)与第四连接轴(14)之间通过传动组件连接。
6.根据权利要求5所述的一种电气自动化多方位可调式机械臂,其特征在于:所述传动组件包括安装在第三连接轴(13)外部的第一皮带轮(15)和安装在第四连接轴(14)外部的第二皮带轮(16),第一皮带轮(15)和第二皮带轮(16)之间通过传动皮带(17)传动连接,第三连接轴(13)通过传动组件带动第四连接轴(14)转动。
7.根据权利要求3所述的一种电气自动化多方位可调式机械臂,其特征在于:所述夹持爪(6)的中部安装有用以调节夹紧程度的爪舵机(24),所述输油管(21)靠近夹持爪(6)的端部连接油筒(22),油筒(22)通过斜撑板安装在夹持爪(6)的上方,油筒(22)的底端连接弧形的滴油管(23),滴油管(23)的滴油口位于夹持爪(6)。
8.根据权利要求7所述的一种电气自动化多方位可调式机械臂,其特征在于:所述夹持爪(6)包括弧形连接杆(61)、异形固定杆(62)、连杆(63)和夹爪件(64),所述弧形连接杆(61)的数量设置成两个,两个弧形连接杆(61)分别与第三连接臂(5)的两块侧板相固定,两块弧形连接杆(61)之间通过圆板固定连接,异形固定杆(62)的中部两侧分别安装两组连杆(63),每组连杆(63)的数量均设置成两个,连杆(63)的一端部通过转轴与夹爪件(64)传动连接,两组夹爪件(64)对称分布,两组连杆(63)交汇于爪舵机(24)的输出端并通过连接轴传动连接。
9.根据权利要求8所述的一种电气自动化多方位可调式机械臂,其特征在于:所述连杆(63)的中部开设有供油流过的输油槽(25),输油槽(25)的两端部圆孔贯穿连杆(63)。
技术总结
本发明公开了一种电气自动化多方位可调式机械臂,属于工业机械臂技术领域,包括机械臂基座,所述机械臂基座的中部位置处安装转向舵机,转向舵机的输出端连接旋转底盘,旋转底盘的顶端以首尾相连的方式依次连接第一连接臂、第二连接臂、第三连接臂和夹持爪,连接位置处均安装有舵机组件。本发明通过油囊实现定时供油的效果,将油囊内部储存的润滑油定时输送至输油管中,之后通过输油管输送至油筒中进行储存,之后再顺着滴油管向夹持爪供油,通过润滑油对夹持爪各个部件进行润滑,从而减小承载力较大的部件受到的机械磨损,还减少摩擦力降低发热。
技术研发人员:龚素文,张敏,严春平,韦晔,倪志莲
受保护的技术使用者:九江职业技术学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!