一种FPC自动化组装控制方法、装置及系统、电子设备与流程
本申请属于fpc自动化组装,尤其涉及一种fpc自动化组装控制方法、装置及系统、电子设备。
背景技术:
1、随着元宇宙概念的兴起,vr设备的市场需求也应声而起,在vr设备的制造过程中,柔性电路板fpc(flexible printed circuit)的组装至关重要。由于消费类电子日趋轻量化,以及vr设备的功能日趋丰富,vr设备主板上的fpc越来越多,同时也越来越小,fpc组装难度以及组装要求也是水涨船高。传统的手工组装不仅难以量化,而且也难以确保质量合格,机械手替代人工并实现fpc自动化组装是极佳的解决方案。
2、然而,由于vr设备主板上fpc数量很多,且尺寸较小,目前在fpc自动化组装过程中,存在fpc软排线位置识别偏差,机械手抓取fpc的位置不够精确,有时需要多次抓取的问题。
技术实现思路
1、本申请提供了一种fpc自动化组装控制方法、装置和系统、电子设备,能够克服fpc软排线位置识别偏差以及抓取fpc位置不够精确的问题。
2、根据本申请的第一个方面,提供了一种fpc自动化组装控制方法,包括:
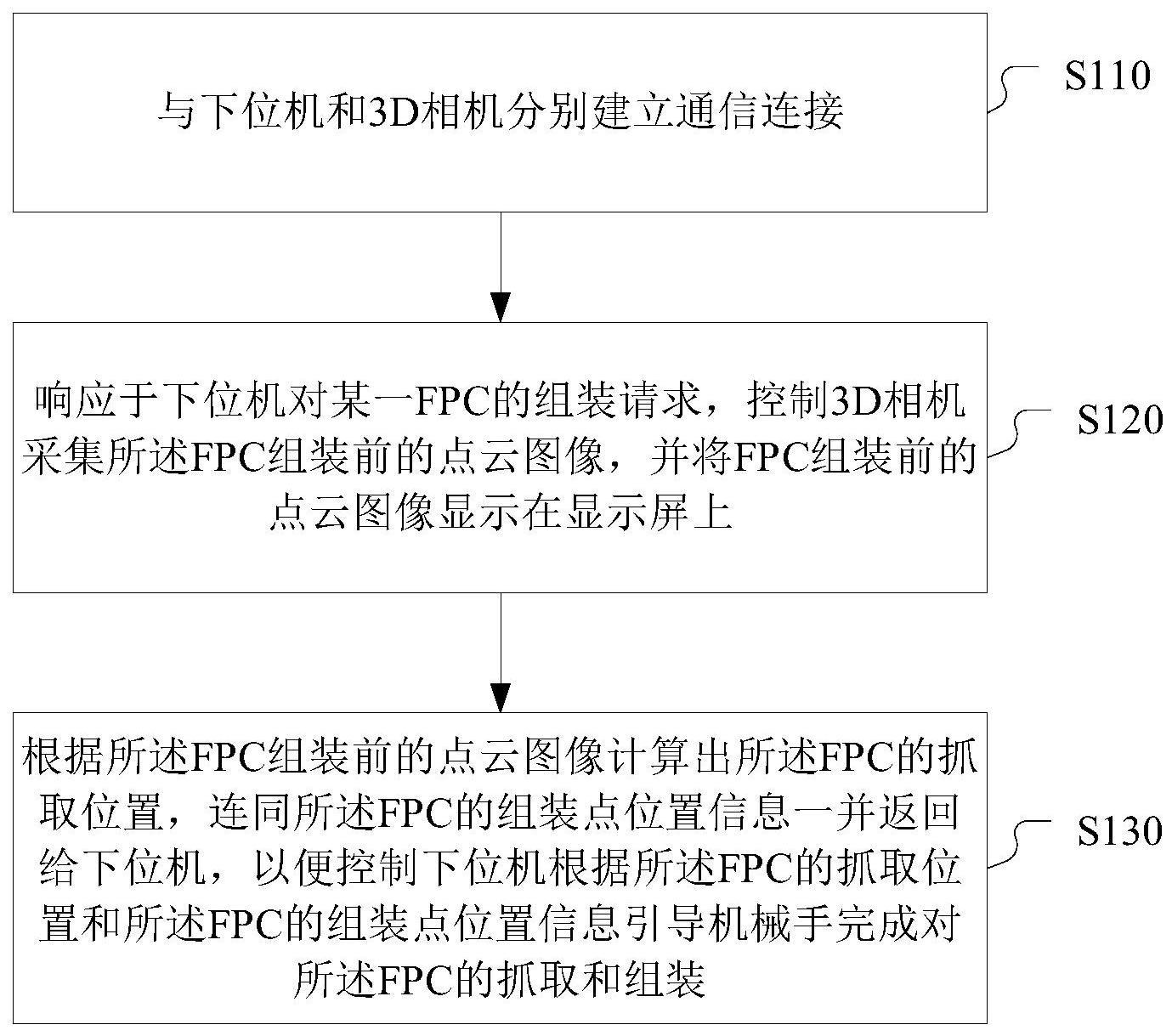
3、与下位机和3d相机分别建立通信连接;
4、响应于下位机对某一fpc的组装请求,控制3d相机采集所述fpc组装前的点云图像,并将所述fpc组装前的点云图像显示在显示屏上;
5、根据所述fpc组装前的点云图像计算出所述fpc的抓取位置,连同所述fpc的组装点位置信息一并返回给下位机,以便控制下位机根据所述fpc的抓取位置和所述fpc的组装点位置信息引导机械手完成对所述fpc的抓取和组装。
6、根据本申请的第二个方面,提供了一种fpc自动化组装控制装置,包括:
7、通信连接单元,用于与下位机和3d相机分别建立通信连接;
8、组装前点云图像采集和显示单元,用于响应于下位机对某一fpc的组装请求,控制3d相机采集所述fpc组装前的点云图像,并将所述fpc组装前的点云图像显示在显示屏上;
9、抓取位置计算单元,用于根据所述fpc组装前的点云图像计算出所述fpc的抓取位置;
10、位置数据返回单元,用于将所述fpc的抓取位置连同所述fpc的组装点位置信息一并返回给下位机,以便控制下位机根据所述fpc的抓取位置和所述fpc的组装点位置信息引导机械手完成对所述fpc的抓取和组装。
11、根据本申请的第三个方面,提供了一种fpc自动化组装控制系统,包括上位机、下位机、3d相机、2d相机和机械手,所述上位机与下位机、3d相机和2d相机分别建立通信连接,所述下位机通信连接所述机械手;
12、所述上位机用于运行前述的fpc自动化组装控制方法;
13、所述下位机用于向所述上位机发送某一fpc的组装请求,并根据所述上位机返回的所述fpc的抓取位置和所述fpc的组装点位置信息引导机械手完成对所述fpc的抓取和组装;以及向所述上位机发送某一fpc的检测请求,并接收所述上位机返回的组装正确或错误的结果数据。
14、根据本申请的第四个方面,提供了一种电子设备,包括:处理器和存储计算机指令的存储器;
15、所述处理器在运行所述计算机指令时执行前述的fpc自动化组装控制方法。
16、根据本申请的第五个方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被电子设备执行时,使得所述电子设备执行前述的fpc自动化组装控制方法。
17、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:
18、本申请实施例在fpc组装时,控制3d相机采集fpc组装前的点云图像,将fpc组装前的点云图像显示在显示屏上,并根据fpc组装前的点云图像计算出所述fpc的抓取位置,然后连同所述fpc的组装点位置信息一并返回给下位机,以便控制下位机引导机械手完成对所述fpc的抓取和组装,从而实现了组装过程中的3d可视化,能够消除对主板上fpc软排线位置的识别偏差,并且fpc的抓取位置是根据3d点云图像计算出的,因此计算出的fpc抓取位置具有3d空间信息,方便控制下位机根据该fpc抓取位置调整机械手的空间抓取姿态,提高机械手抓取fpc的位置精确度,减少抓取次数。
技术特征:
1.一种fpc自动化组装控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1-4任一项所述的方法,其特征在于,所述方法还包括:
6.一种fpc自动化组装控制装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述装置还包括:
8.根据权利要求7所述的装置,其特征在于,所述装置还包括:
9.根据权利要求6所述的装置,其特征在于,所述装置还包括:
10.根据权利要求6-9任一项所述的装置,其特征在于,所述装置还包括:
11.一种fpc自动化组装控制系统,其特征在于,包括上位机、下位机、3d相机、2d相机和机械手,所述上位机与下位机、3d相机和2d相机分别建立通信连接,所述下位机通信连接所述机械手;
12.一种电子设备,包括:处理器和存储计算机指令的存储器;
技术总结
本申请实施例公开了一种FPC自动化组装控制方法、装置及系统、电子设备。所述控制方法包括:与下位机和3D相机分别建立通信连接;响应于下位机对某一FPC的组装请求,控制3D相机采集所述FPC组装前的点云图像,并将所述FPC组装前的点云图像显示在显示屏上;根据所述FPC组装前的点云图像计算出所述FPC的抓取位置,连同所述FPC的组装点位置信息一并返回给下位机,以便控制下位机根据所述FPC的抓取位置和所述FPC的组装点位置信息引导机械手完成对所述FPC的抓取和组装。本申请方案实现了组装过程中的3D可视化,能够消除对主板上FPC软排线位置的识别偏差,提高机械手抓取FPC的位置精确度,减少抓取次数。
技术研发人员:史学冬,盖增园,迟小羽,李炳强
受保护的技术使用者:歌尔股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!