一种用于装配式建筑的施工机器人的制作方法
本发明涉及装配式建筑施工领域,尤其涉及一种用于装配式建筑的施工机器人。
背景技术:
1、装配式建筑是指把传统建造方式中的大量现场作业工作转移到工厂进行,在工厂加工制作好建筑用的构件和配件如楼板、墙板、楼梯、阳台等,运输到建筑施工现场,通过可靠的连接方式在现场装配安装而成的建筑。
2、随着现代工业技术的发展,建造房屋可以像机器生产那样,成批成套地制造。只要把预制好的房屋构件,运到工地装配起来就成了由于装配式建筑的建造速度快,而且生产成本较低,迅速在世界各地推广开来。
3、装配墙体在基板上吊装完成后,通过预制注浆口对装配墙体的内部进行混凝土浆料的输送,使装配墙体现浇固定在基板上,在现浇注浆的过程中,通过相应位置预制注浆口溢出的浆料识别实际现浇注浆的进度,在预制注浆口上溢出浆料后,需要通过堵头及时将预制注浆口进行封堵,而堵塞的过程中,常会因预制注浆口内部的杂物阻挡,造成封堵不完全产生间隙,部分现浇注浆的浆料仍会穿过间隙向外溢出,不便于装配式墙体的现浇固定操作。因此,有必要设计一种用于装配式建筑的施工机器人对预制件的注浆口进行清理。
技术实现思路
1、本发明要解决的技术问题是提供一种用于装配式建筑的施工机器人,实现预制件的注浆口的快速自动清理。
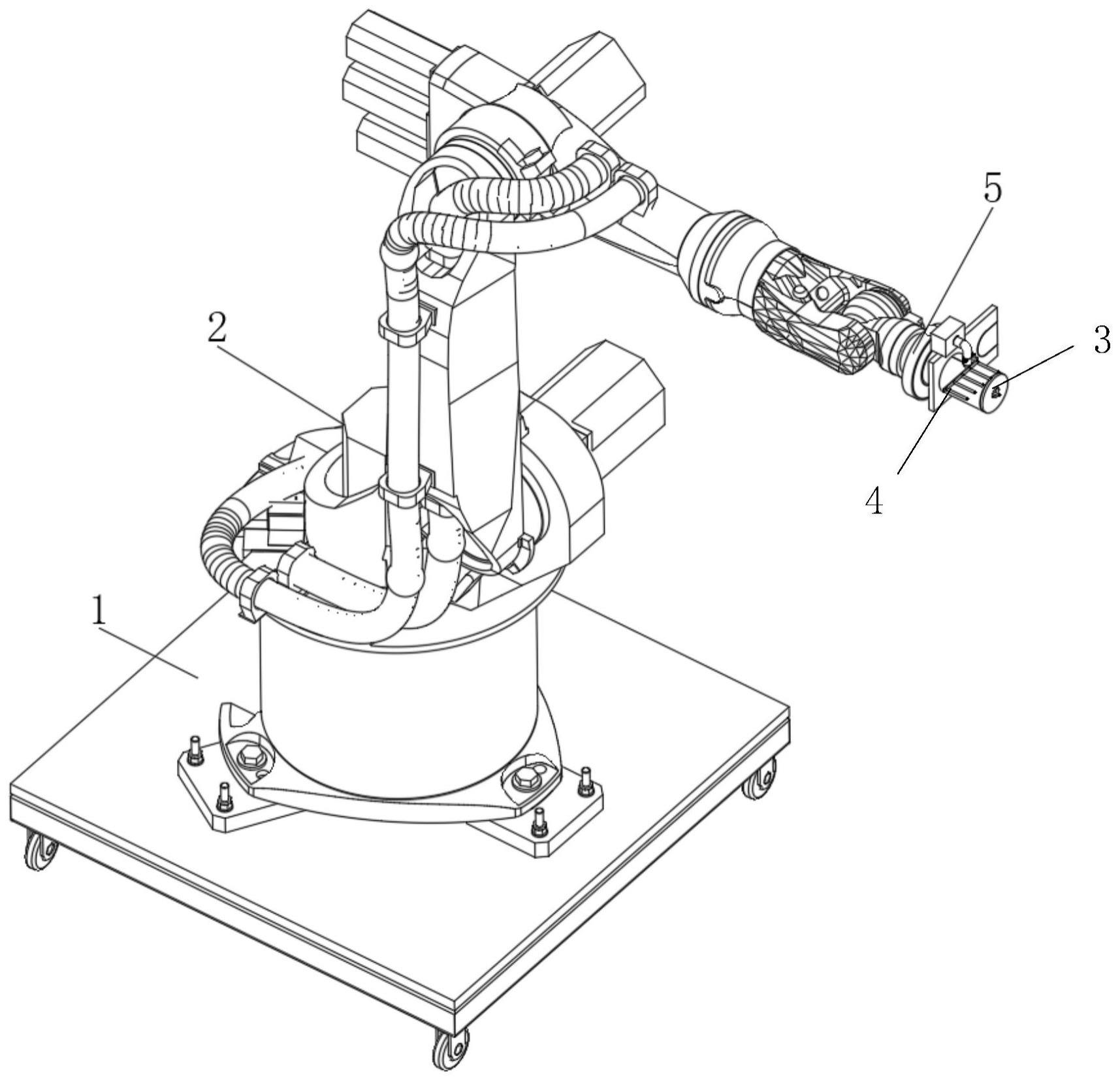
2、本发明为解决上述技术问题而采用的技术方案是提供一种用于装配式建筑的施工机器人,包括可移动底座,所述底座上设置有机械手臂,所述机械手臂的移动端设置有安装盘,所述安装盘上设置有清理机构;所述清理机构包括安装管,所述安装管中心设置有清理通道,所述安装管一端与安装盘连接,另一端中心设置有出气孔,所述出气孔与所述清理通道连通;所述清理通道中设置有第二传动组件,所述第二传动组件连接有敲击杆,所述敲击杆的端部伸出所述出气孔;所述安装管管壁设置有安装孔,所述安装孔连通所述清理通道,所述安装孔连接有第一连接管,所述第一连接管中设置有驱动组件,所述驱动组件连接有第一传动组件,所述第一传动组件延伸到所述清理通道连接所述第二传动组件带动所述敲击杆移动。
3、进一步地,所述驱动组件包括转动连接到第一连接管侧壁的驱动轴,所述第一连接管的外部安装有驱动所述驱动轴旋转的驱动电机,所述驱动轴位于第一连接管内部的侧壁上固定有第一锥齿,所述第一传动组件包括转动杆,所述转动杆设置在第一连接管的内部,所述转动杆的一端设置有第二锥齿,所述第二锥齿与第一锥齿相互啮合设置;所述转动杆的另一端固定有凸轮,所述凸轮设置在清理通道中并与第二传动组件抵接;所述转动杆上还设置有扇叶。
4、进一步地,所述第二传动组件包括固定在清理通道中的支撑板,所述敲击杆与所述支撑板滑动连接,所述敲击杆的一端伸出安装管,另一端固定有弧形传动板,所述弧形传动板上固定有橡胶传动板,所述橡胶传动板与第一传动组件抵接并在第一传动组件带动下推动所述敲击杆移动,所述支撑板上设置有用于弧形传动板推动后复位的复位组件。
5、进一步地,所述复位组件包括滑动连接在支撑板上的第一t型杆,所述第一t型杆的一端与弧形传动板的一端固定,所述第一t型杆上套设有第一弹簧,所述第一弹簧的两端分别与第一t型杆及支撑板连接。
6、进一步地,还包括振动机构,所述振动机构包括振动组件,所述振动组件连接有第三传动组件,所述第三传动组件与所述驱动组件连接带动所述振动组件动作。
7、进一步地,所述振动组件包括固定在第一连接管上的固定板,所述固定板上通过连接组件连接有z型板,所述z型板的一端固定有条形板,所述条形板上排列固定有多个振动杆,所述z型板与第三传动组件连接,所述第三传动组件通过z型板带动所述振动杆振动。
8、进一步地,所述第三传动组件包括圆盘,所述圆盘固定在驱动组件的驱动轴的端部且位于第一连接管的外部,所述圆盘外周间隔设置有多个橡胶凸起;所述z型板与圆盘外周抵接。
9、进一步地,所述连接组件包括滑动连接在z型板上的第二t型杆,所述第二t型杆的一端与固定板连接,所述第二t型杆上套设有第二弹簧,所述第二弹簧的两端分别与z型板及固定板连接。
10、进一步地,所述第一连接管连接有收集组件,所述安装盘的内部设置有封闭的安装腔,所述安装盘上设置有连通安装腔的第二连接管,所述收集组件包括收集箱,所述第一连接管及第二连接管分别位于收集箱的两侧并与收集箱的内部连通。
11、进一步地,所述第一连接管位于收集箱内部的一端安装有过滤网,所述收集箱上铰链有盖板;所述安装盘上设置有与安装腔内部相通的进气孔。
12、本发明对比现有技术有如下的有益效果:本发明提供的用于装配式建筑的施工机器人,装配墙体在基板上吊放完成后,通过机械手臂配合清理组件的清理作用及敲击组件对杂物敲击粉碎的作用,实现对装配墙体上各个注浆口的快速且高质量的清理操作,便于后续装配墙体的现浇固定。
技术特征:
1.一种用于装配式建筑的施工机器人,其特征在于,包括可移动底座,所述底座上设置有机械手臂,所述机械手臂的移动端设置有安装盘,所述安装盘上设置有清理机构;
2.如权利要求1所述的用于装配式建筑的施工机器人,其特征在于,所述驱动组件包括转动连接到第一连接管侧壁的驱动轴,所述第一连接管的外部安装有驱动所述驱动轴旋转的驱动电机,所述驱动轴位于第一连接管内部的侧壁上固定有第一锥齿,所述第一传动组件包括转动杆,所述转动杆设置在第一连接管的内部,所述转动杆的一端设置有第二锥齿,所述第二锥齿与第一锥齿相互啮合设置;所述转动杆的另一端固定有凸轮,所述凸轮设置在清理通道中并与第二传动组件抵接;所述转动杆上还设置有扇叶。
3.如权利要求1所述的用于装配式建筑的施工机器人,其特征在于,所述第二传动组件包括固定在清理通道中的支撑板,所述敲击杆与所述支撑板滑动连接,所述敲击杆的一端伸出安装管,另一端固定有弧形传动板,所述弧形传动板上固定有橡胶传动板,所述橡胶传动板与第一传动组件抵接并在第一传动组件带动下推动所述敲击杆移动,所述支撑板上设置有用于弧形传动板推动后复位的复位组件。
4.如权利要求3所述的用于装配式建筑的施工机器人,其特征在于,所述复位组件包括滑动连接在支撑板上的第一t型杆,所述第一t型杆的一端与弧形传动板的一端固定,所述第一t型杆上套设有第一弹簧,所述第一弹簧的两端分别与第一t型杆及支撑板连接。
5.如权利要求1所述的用于装配式建筑的施工机器人,其特征在于,还包括振动机构,所述振动机构包括振动组件,所述振动组件连接有第三传动组件,所述第三传动组件与所述驱动组件连接带动所述振动组件动作。
6.如权利要求5所述的用于装配式建筑的施工机器人,其特征在于,所述振动组件包括固定在第一连接管上的固定板,所述固定板上通过连接组件连接有z型板,所述z型板的一端固定有条形板,所述条形板上排列固定有多个振动杆,所述z型板与第三传动组件连接,所述第三传动组件通过z型板带动所述振动杆振动。
7.如权利要求6所述的用于装配式建筑的施工机器人,其特征在于,所述第三传动组件包括圆盘,所述圆盘固定在驱动组件的驱动轴的端部且位于第一连接管的外部,所述圆盘外周间隔设置有多个橡胶凸起;所述z型板与圆盘外周抵接。
8.如权利要求6所述的用于装配式建筑的施工机器人,其特征在于,所述连接组件包括滑动连接在z型板上的第二t型杆,所述第二t型杆的一端与固定板连接,所述第二t型杆上套设有第二弹簧,所述第二弹簧的两端分别与z型板及固定板连接。
9.如权利要求1所述的用于装配式建筑的施工机器人,其特征在于,所述第一连接管连接有收集组件,所述安装盘的内部设置有封闭的安装腔,所述安装盘上设置有连通安装腔的第二连接管,所述收集组件包括收集箱,所述第一连接管及第二连接管分别位于收集箱的两侧并与收集箱的内部连通。
10.如权利要求9所述的用于装配式建筑的施工机器人,其特征在于,所述第一连接管位于收集箱内部的一端安装有过滤网,所述收集箱上铰链有盖板;所述安装盘上设置有与安装腔内部相通的进气孔。
技术总结
本发明公开了一种用于装配式建筑的施工机器人,包括可移动底座,底座上设置有机械手臂,机械手臂的移动端设置有安装盘,安装盘上设置有清理机构;清理机构包括安装管,安装管中心设置有清理通道,安装管一端与安装盘连接,另一端中心设置有出气孔,出气孔与清理通道连通;清理通道中设置有传动组件,传动组件连接有敲击杆,敲击杆的端部伸出出气孔;安装管管壁设置有安装孔,安装孔连通清理通道,安装孔连接有第一连接管,第一连接管中设置有驱动组件,驱动组件连接传动组件带动敲击杆移动。本发明通过机械手臂配合清理组件的清理作用及敲击组件对杂物敲击粉碎的作用,实现对装配墙体上各个注浆口的快速且高质量的清理操作。
技术研发人员:何心刚,田映,侯意彬
受保护的技术使用者:上海市浦东新区建设(集团)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!