一种绳驱超冗余机械臂的驱动装置
本发明属于绳驱动的机器人,特别是一种绳驱超冗余机械臂的驱动装置。
背景技术:
1、绳驱超冗余机械臂采用钢丝绳驱动,驱动机构和执行机构分离,电机、控制器等驱动装置可以后置,大大减小了机械臂本体的质量和体积,使其结构紧凑、运动灵活,同时也避免了外界环境对驱动机构的不良影响。超冗余机械臂的自由度数远超三维空间任务所需的6个自由度,因此相比于传统关节型刚性机械臂更加纤细、灵巧,具有极好的环境适应性和极高的避障能力,能够穿过狭小的非结构环境完成操作任务。
2、超冗余机械臂的高精度控制依赖于驱动机构性能,目前大部分的超冗余机械臂的驱动装置都仅对驱动机械臂的钢丝绳实现了位移反馈,但对于新兴的力控制方式,还需增加对钢丝绳直接的力反馈。钢丝绳驱动的方式,虽然简化了前端机械臂的结构,但在实际安装过程中,钢丝绳的微调预紧仍然是较为繁琐的问题,亟需结合力反馈构建便捷、精细的预紧力调节机构。此外,在不同的工况下,所使用的超冗余机械臂的直径可能不同,因此需要实现驱动装置对于不同尺寸机械臂臂身都具有兼容性。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的问题,提供一种高负载、高精度、可实现绳索预紧力调节的驱动装置,用以超冗余机械臂的位移、速度和力控制,并且对不同尺寸的机械臂都具有兼容性。
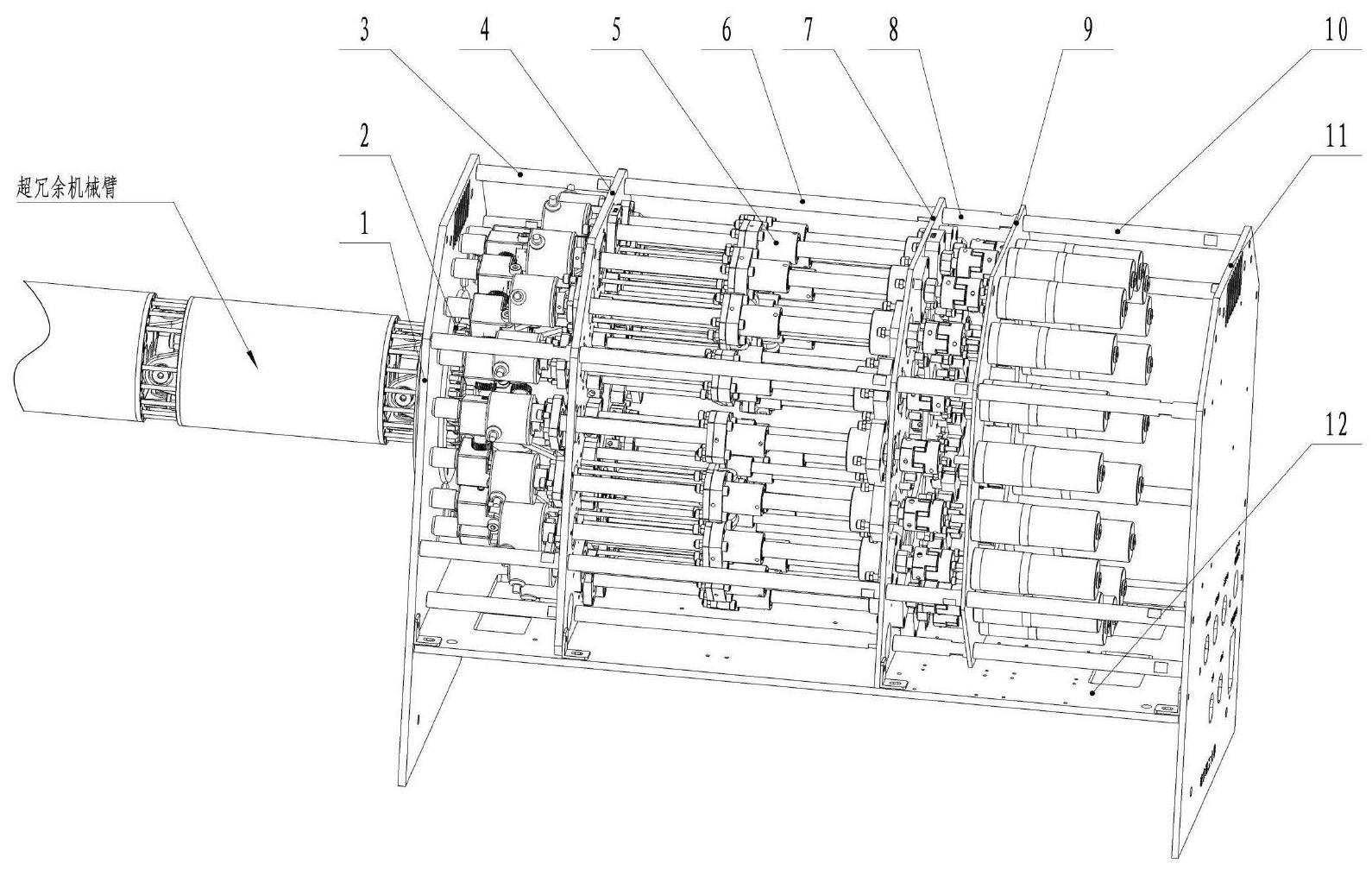
2、实现本发明目的的技术解决方案为:一种绳驱超冗余机械臂的驱动装置,所述装置包括包括前面板、前导向组件、前面板连接杆、前支撑板、驱动模组、前后支撑板连接杆、后支撑板、电机安装板连接杆、电机安装板、后面板连接杆、后面板、底板;所述前面板、前支撑板、后支撑板、电机安装板、后面板依次平行设置,且各板的一端均固定安装在底板上,另一端依次通过若干组前面板连接杆、前后支撑板连接杆、电机安装板连接杆和后面板连接杆连接固定,构成驱动装置的框架;多路驱动模组呈圆周分布,均匀安装在框架之中,驱动模组包括钢丝绳,钢丝绳通过设置于前面板上的前导向组件与超冗余机械臂相连,驱动模组通过改变钢丝绳在超冗余机械臂端的长度,实现驱动超冗余机械臂。
3、进一步地,每路所述驱动模组还包括拉力传感器、微调组件、绝对值编码器、导向轮组件、光轴、滚珠丝杠、滑台组件、丝杠支撑座、光轴支撑座、联轴器和驱动电机;所述拉力传感器的一侧固定在前面板上,另一侧固连微调组件;所述绝对值编码器和导向轮组件均安装在前支撑板上靠近前面板的一侧;所述滚珠丝杠的一端穿过安装于前支撑板上的一个丝杠支撑座后插入绝对值编码器中,另一端穿过安装于后支撑板上的另一个丝杠支撑座后连接联轴器的一端,联轴器的另一端连接安装于电机安装板上的驱动电机;所述光轴的两端分别通过一个光轴支撑座安装在前支撑板、后支撑板之间,且与滚珠丝杠相平行;所述滑台组件安装在光轴、滚珠丝杠上,可沿两者轴向移动;所述钢丝绳的一端连接超冗余机械臂,另一端依次穿过前导向组件和导向轮组件,然后穿过滑台组件并绕其反向穿出,最终连接到微调组件上;所述拉力传感器测量钢丝绳拉力,结合微调组件松开或张紧钢丝绳进而满足预紧要求;在驱动电机的作用下,滚珠丝杠转动,带动滑台组件沿光轴平移,进而控制改变钢丝绳在超冗余机械臂端的长度,驱动超冗余机械臂运动。
4、进一步地,所述前导向组件包括前导向轮架、前导向轮以及前导向轮压板;3*n个前导向轮沿圆周安装在前导向轮架的轮槽中,并通过固定在前导向轮架上的前导向轮压板固定,以此限制前导向轮的位移,使其只能转动;3*n路钢丝绳分别绕于3*n个前导向轮上实现3*n路钢丝绳的导向,n为超冗余机械臂的段数。
5、进一步地,所述前导向组件可更换尺寸规格,用于实现驱动装置兼容不同直径的超冗余机械臂臂体。
6、进一步地,所述前面板连接杆、前后支撑板连接杆、电机安装板连接杆和后面板连接杆的组数为n。
7、进一步地,所述微调组件包括蜗轮座、蜗杆、压紧螺丝、调节螺杆、蜗轮和蜗轮轴;所述蜗轮安装在固定于蜗轮座中的蜗轮轴上,所述蜗杆固定在蜗轮座上的两个支撑座上,且与蜗轮相接触,蜗杆的一端设置调节螺杆,所述压紧螺丝拧紧在蜗轮上,将钢丝绳固定;通过转动调节螺杆,带动蜗轮转动,卷起或释放钢丝绳,从而调整预紧力。
8、进一步地,所述导向轮组件包括导向轮座、导向滑轮和导向滑轮支撑轴;所述导向滑轮通过导向滑轮支撑轴支撑在导向轮座上,可绕导向滑轮支撑轴转动;所述导向轮座底部设置三个通孔,其中通过两侧的通孔将导向轮座固定在前支撑板上,钢丝绳穿过中间的通孔绕于导向滑轮上。
9、进一步地,所述滑台组件包括滑台基座、动滑轮轴、动滑轮、滚珠丝杠螺母和直线轴承;所述滚珠丝杠螺母和直线轴承通过螺丝直接固连在滑台基座上,动滑轮轴通过挡圈固定在滑台基座上,并穿过动滑轮,使动滑轮只能绕动滑轮轴转动;所述滑台基座在动滑轮下方位置设有两个通孔,钢丝绳从其中一个通孔穿入,绕在动滑轮上,之后再从另一通孔穿出。
10、本发明与现有技术相比,其显著优点为:
11、(1)使用滚珠丝杠和绝对值编码器实现高精度的位移控制,驱动精度高,可实现0.1mm的丝杠位移控制。
12、(2)使用动滑轮机构,缩短了丝杠行程,提高了驱动模组负载能力,钢丝绳25kg载荷的条件下可实现驱动模组50kg的负载能力。
13、(3)使用蜗轮蜗杆调节机构和拉力传感器进行预紧力的微调,每一路驱动绳的预紧力都可以精准调节,同时可以提供实时的力反馈,为控制系统的设计提供便利。
14、(4)可更换的前导向轮架,可以让驱动装置兼容不同直径的超冗余机械臂臂体。
15、下面结合附图对本发明作进一步详细描述。
技术特征:
1.一种绳驱超冗余机械臂的驱动装置,其特征在于,所述装置包括包括前面板(1)、前导向组件(2)、前面板连接杆(3)、前支撑板(4)、驱动模组(5)、前后支撑板连接杆(6)、后支撑板(7)、电机安装板连接杆(8)、电机安装板(9)、后面板连接杆(10)、后面板(11)、底板(12);所述前面板(1)、前支撑板(4)、后支撑板(7)、电机安装板(9)、后面板(11)依次平行设置,且各板的一端均固定安装在底板(12)上,另一端依次通过若干组前面板连接杆(3)、前后支撑板连接杆(6)、电机安装板连接杆(8)和后面板连接杆(10)连接固定,构成驱动装置的框架;多路驱动模组(5)呈圆周分布,均匀安装在框架之中,驱动模组(5)包括钢丝绳(51),钢丝绳(51)通过设置于前面板(1)上的前导向组件(2)与超冗余机械臂相连,驱动模组(5)通过改变钢丝绳(51)在超冗余机械臂端的长度,实现驱动超冗余机械臂。
2.根据权利要求1所述的绳驱超冗余机械臂的驱动装置,其特征在于,每路所述驱动模组还包括拉力传感器(52)、微调组件(53)、绝对值编码器(54)、导向轮组件(55)、光轴(56)、滚珠丝杠(57)、滑台组件(58)、丝杠支撑座(59)、光轴支撑座(510)、联轴器(511)和驱动电机(512);所述拉力传感器(52)的一侧固定在前面板(1)上,另一侧固连微调组件(53);所述绝对值编码器(54)和导向轮组件(55)均安装在前支撑板(4)上靠近前面板(1)的一侧;所述滚珠丝杠(57)的一端穿过安装于前支撑板(4)上的一个丝杠支撑座(59)后插入绝对值编码器(54)中,另一端穿过安装于后支撑板(7)上的另一个丝杠支撑座(59)后连接联轴器(511)的一端,联轴器(511)的另一端连接安装于电机安装板(9)上的驱动电机(512);所述光轴(56)的两端分别通过一个光轴支撑座(510)安装在前支撑板(4)、后支撑板(7)之间,且与滚珠丝杠(57)相平行;所述滑台组件(58)安装在光轴(56)、滚珠丝杠(57)上,可沿两者轴向移动;所述钢丝绳(51)的一端连接超冗余机械臂,另一端依次穿过前导向组件(2)和导向轮组件(55),然后穿过滑台组件(58)并绕其反向穿出,最终连接到微调组件(53)上;所述拉力传感器(52)测量钢丝绳(51)拉力,结合微调组件(53)松开或张紧钢丝绳(51)进而满足预紧要求;在驱动电机(512)的作用下,滚珠丝杠(57)转动,带动滑台组件(58)沿光轴(56)平移,进而控制改变钢丝绳(51)在超冗余机械臂端的长度,驱动超冗余机械臂运动。
3.根据权利要求1所述的绳驱超冗余机械臂的驱动装置,其特征在于,所述前导向组件(2)包括前导向轮架(21)、前导向轮(22)以及前导向轮压板(23);3*n个前导向轮(22)沿圆周安装在前导向轮架(21)的轮槽中,并通过固定在前导向轮架(21)上的前导向轮压板(23)固定,以此限制前导向轮(22)的位移,使其只能转动;3*n路钢丝绳分别绕于3*n个前导向轮(22)上实现3*n路钢丝绳(51)的导向,n为超冗余机械臂的段数。
4.根据权利要求3所述的绳驱超冗余机械臂的驱动装置,其特征在于,所述前导向组件(2)可更换尺寸规格,用于实现驱动装置兼容不同直径的超冗余机械臂臂体。
5.根据权利要求3所述的绳驱超冗余机械臂的驱动装置,其特征在于,所述前面板连接杆(3)、前后支撑板连接杆(6)、电机安装板连接杆(8)和后面板连接杆(10)的组数为n。
6.根据权利要求2所述的绳驱超冗余机械臂的驱动装置,其特征在于,所述微调组件包括蜗轮座(531)、蜗杆(532)、压紧螺丝(533)、调节螺杆(534)、蜗轮(535)和蜗轮轴(536);所述蜗轮(535)安装在固定于蜗轮座(531)中的蜗轮轴(536)上,所述蜗杆(532)固定在蜗轮座(531)上的两个支撑座上,且与蜗轮(535)相接触,蜗杆(532)的一端设置调节螺杆(534),所述压紧螺丝(533)拧紧在蜗轮(535)上,将钢丝绳(51)固定;通过转动调节螺杆(534),带动蜗轮(535)转动,卷起或释放钢丝绳(51),从而调整预紧力。
7.根据权利要求2所述的绳驱超冗余机械臂的驱动装置,其特征在于,所述导向轮组件(55)包括导向轮座(551)、导向滑轮(552)和导向滑轮支撑轴(553);所述导向滑轮(552)通过导向滑轮支撑轴(553)支撑在导向轮座(551)上,可绕导向滑轮支撑轴(553)转动;所述导向轮座(551)底部设置三个通孔,其中通过两侧的通孔将导向轮座(551)固定在前支撑板(4)上,钢丝绳(51)穿过中间的通孔绕于导向滑轮(552)上。
8.根据权利要求2所述的绳驱超冗余机械臂的驱动装置,其特征在于,所述滑台组件(58)包括滑台基座(581)、动滑轮轴(582)、动滑轮(583)、滚珠丝杠螺母(584)和直线轴承(585);所述滚珠丝杠螺母(584)和直线轴承(585)通过螺丝直接固连在滑台基座(581)上,动滑轮轴(582)通过挡圈固定在滑台基座(581)上,并穿过动滑轮(583),使动滑轮(583)只能绕动滑轮轴(582)转动;所述滑台基座(581)在动滑轮(583)下方位置设有两个通孔,钢丝绳(51)从其中一个通孔穿入,绕在动滑轮(583)上,之后再从另一通孔穿出。
技术总结
本发明公开了一种绳驱超冗余机械臂的驱动装置,包括安装驱动装置的框架,以及均匀安装在框架之中多路驱动模组。驱动模组包括钢丝绳、拉力传感器、微调组件、绝对值编码器、导向轮组件、光轴、滚珠丝杠、滑台组件、丝杠支撑座、光轴支撑座、联轴器、驱动电机。驱动电机驱动滚珠丝杠,使得滑台组件沿光轴平移,进而控制钢丝绳,驱动超冗余机械臂运动。本发明通过使用滚珠丝杠和绝对值编码器实现高精度的位移控制,驱动精度高。动滑轮缩短了丝杠行程,提高了驱动模组负载能力。微调组件和拉力传感器结合,每一路驱动绳的预紧力都可以精准调节,同时可以提供实时的力反馈。可更换的前导向组件,可以让驱动装置兼容不同直径的超冗余机械臂臂体。
技术研发人员:许立松,郭健,丁萌,郑先杰,余劲天,郭毓,马国梁
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!