一种可用于拍背排痰护理的一体化机械臂末端执行器
本发明涉及机器人,是一种重量较轻,易于制造、安装和使用的,适用于拍背排痰护理的一体化机械臂末端执行器。
背景技术:
1、我国icu护理领域有相当一部分患者需要定期进行排痰。目前人工进行拍背排痰护理作业时,主要采用人工听诊的方式确定拍击位置,并使用手持式振动排痰器进行工作。但是,人工听诊准确度较高但效率低下,手持式排痰器振动较大,难以长时间使用,整个工作过程中医护人员劳动强度大、劳动重复性高。除此之外,近距离接触还易导致医患交叉感染等风险。
2、为减轻医护人员的负担,可以引入智能机器人代替人工完成该类工作,通过设计相应的传动装置对听诊器的运动进行控制,实现自动听诊;通过设计相应的执行机构,代替人工实现对相应位置的拍背排痰护理功能。
3、对听诊而言,电子听诊器与一般人工医用听诊器相比具有明显不同的特征,包括保护与听诊头相连的末端数据线的保护壳和漆包线等,这使得电子听诊器更为笨重,故而必须为其设计专门的夹持和传动机构予以控制。对辅助拍背排痰过程而言,适用于人体背部的拍背排痰装置需要柔软的末端,以及相对稳定的工作过程,防止对患者造成伤害。本发明通过对电子听诊器和拍背排痰辅助执行机构的特征进行分析,综合考虑实际使用过程中可能遇见的各种问题,设计了一种适用于拍背排痰护理的一体化机械臂末端执行器。
技术实现思路
1、本发明设计了电子听诊器夹持传动装置,实现对电子听诊器的运动控制,设计了相应的执行机构,实现对患者的辅助拍背排痰护理,共同构成一种可用于拍背排痰护理的一体化机械臂末端执行器。该装置重量较轻,结构简单,工作范围广,易于制造和安装,能够有效解决上述背景技术中所提到的痛点问题。
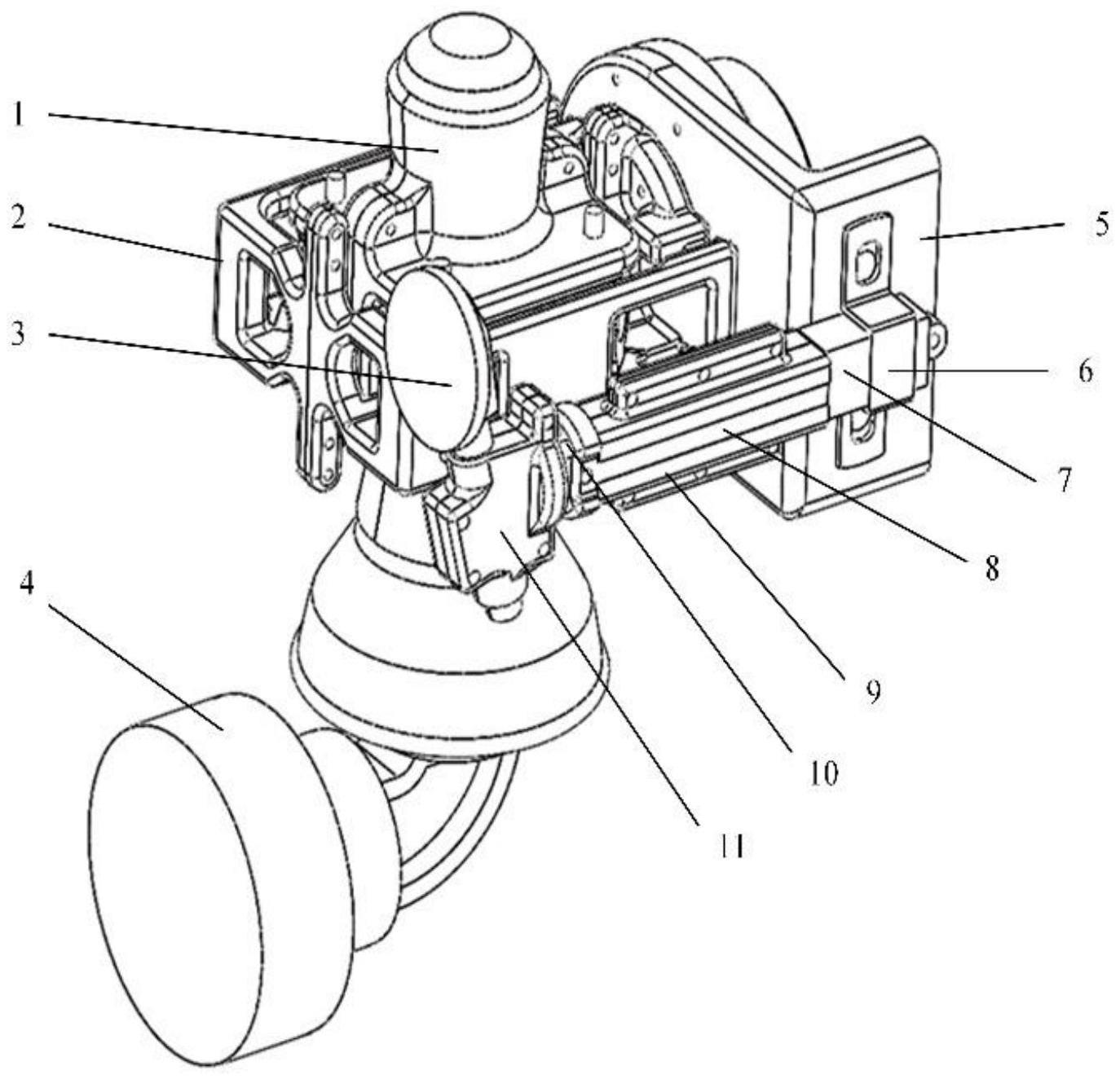
2、一种可用于拍背排痰护理的一体化机械臂末端执行器,其特征在于:机械臂基座,转接、支撑和夹持机构,拍背排痰执行机构,听诊器夹持传动机构。
3、所述听诊器夹持传动机构由夹具、传动机构、辅助支撑机构和被动柔顺机构组成。其中,夹具通过过盈配合实现听诊器紧固;传动机构由电动推杆实现;被动柔顺机构由弹簧组实现;辅助支撑机构以套筒导轨的形式实现,包覆推杆安装。
4、所述执行机构以电动拍击器为主要工作部件。以直接与转接法兰相连的方盒型支撑法兰为主要的结构,采用变径管夹具将电动拍击器固定在支撑法兰的中心轴位置。在支撑法兰上,围绕电动拍击器夹具,沿支撑法兰的对角线均匀布置四个减振器。支撑法兰采取镂空设计,在保证结构强度和扩展性的前提下降低了整体质量。
5、优选的,对于一般的转接和支撑部件,使用3d打印树脂材料,被动柔顺机构采用了具有较大刚度的弹簧钢,对于辅助支撑机构,使用3d打印尼龙材料,更耐磨,适合导轨往复运动。
6、本发明将多种结构应用于拍背排痰护理的一体化机械臂末端执行器,具有原理简单,整体结构紧凑,设计美观,安装方便,使用简单等优点。
技术特征:
1.一种可用于拍背排痰护理的一体化机械臂末端执行器,其特征在于:机械臂基座,转接、支撑和夹持机构,拍背排痰执行机构,听诊器夹持传动机构。
2.如权利要求1所述的转接机构通过设计,采用圆盘形转接法兰和方盒型支撑法兰,将拍背排痰执行机构固定在机械臂基座上,形成基本工作结构。
3.如权利要求1所述的支撑夹持机构为多个结构复合体。机构外部为主结构,即方盒型支撑法兰。该结构在保证相应强度的情况下采用镂空设计充分降低了重量,并在各个方向上充分保留了用于后续可能的外部零件安装使用的板面。中央为拍背排痰执行机构的夹持具,为一紧贴夹持部位的变径管,拍背排痰机构为标准件。在支撑法兰和夹具之间采用了按对角线和形心对称排布的减震器,提供各个方向上效果良好的稳定和减振。
4.如权利要求1所述的听诊器夹持传动机构由基座、传动装置、辅助支撑机构、被动柔顺机构和听诊器夹持机构组成。该机构以转接机构中的转接法兰延伸出的侧板为基座;传动装置选择电动推杆,听诊器选择一般电子听诊器,均为标准元器件;辅助支撑机构为套筒导轨机构,用以提高电动推杆末端承受剪切力矩的能力;被动柔顺机构为多个标准弹簧构成的弹簧组,采用螺纹安装并胶合固定;夹持机构采用套筒结构,通过过盈配合设计紧固听诊器。
技术总结
本发明涉及机器人技术领域,是一种重量较轻,易于制造、安装和使用的,适用于拍背排痰护理的一体化机械臂末端执行器。该机构主要包括机械臂基座,转接、支撑和夹持机构,拍背排痰执行机构,听诊器夹持传动机构。工作时,首先通过外部指令给出患者背部的位置,并控制机械臂靠近患者背部。当达到工作位置附近时,控制听诊器向前伸出,对患者背部需拍击处进行听诊,当确定需要辅助拍背排痰时,控制听诊器退回初始位置,切换控制拍背排痰执行机构运动到相应位置,对患者的背部进行辅助拍背排痰。完成动作后,回到初始位置,等待下一次运行指令。外部指令既可以来自于控制的算法,也可以来自于外部终端的人工指令。该发明能够填补该应用领域的空白,减轻医护人员的护理压力,减少人工辅助拍背排痰过程中的交叉感染风险等。
技术研发人员:王敏,李荣博,谭亦枭,潘越,陈殿生
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!