一种工业机器人的自动化控制系统
本发明涉及工业控制机器人,具体为一种工业机器人的自动化控制系统。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、现有的工业机器人在工作过程中,需要随时随地对其进行控制,而目前的控制装置或控制系统,在对机器人进行控制时需要标定出机器人标定针的工具坐标系,并用标定针碰触相机标定板的相关坐标点,此标定方法步骤繁琐且会带来很大的人为误差;同时,采用传统方式抓取目标物体时要求目标物体的摆放位置及角度必须固定,不同尺寸和形状的目标物体需要不同定位工装设备,存在成本高、效率低、自动化程度低的缺点
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种工业机器人的自动化控制系统,解决了现有的控制系统在进行使用时需要人工控制,工作效率低,人工成本和经营成本高定位精度低,稳定性不佳,实用性不强的问题。
3、(二)技术方案
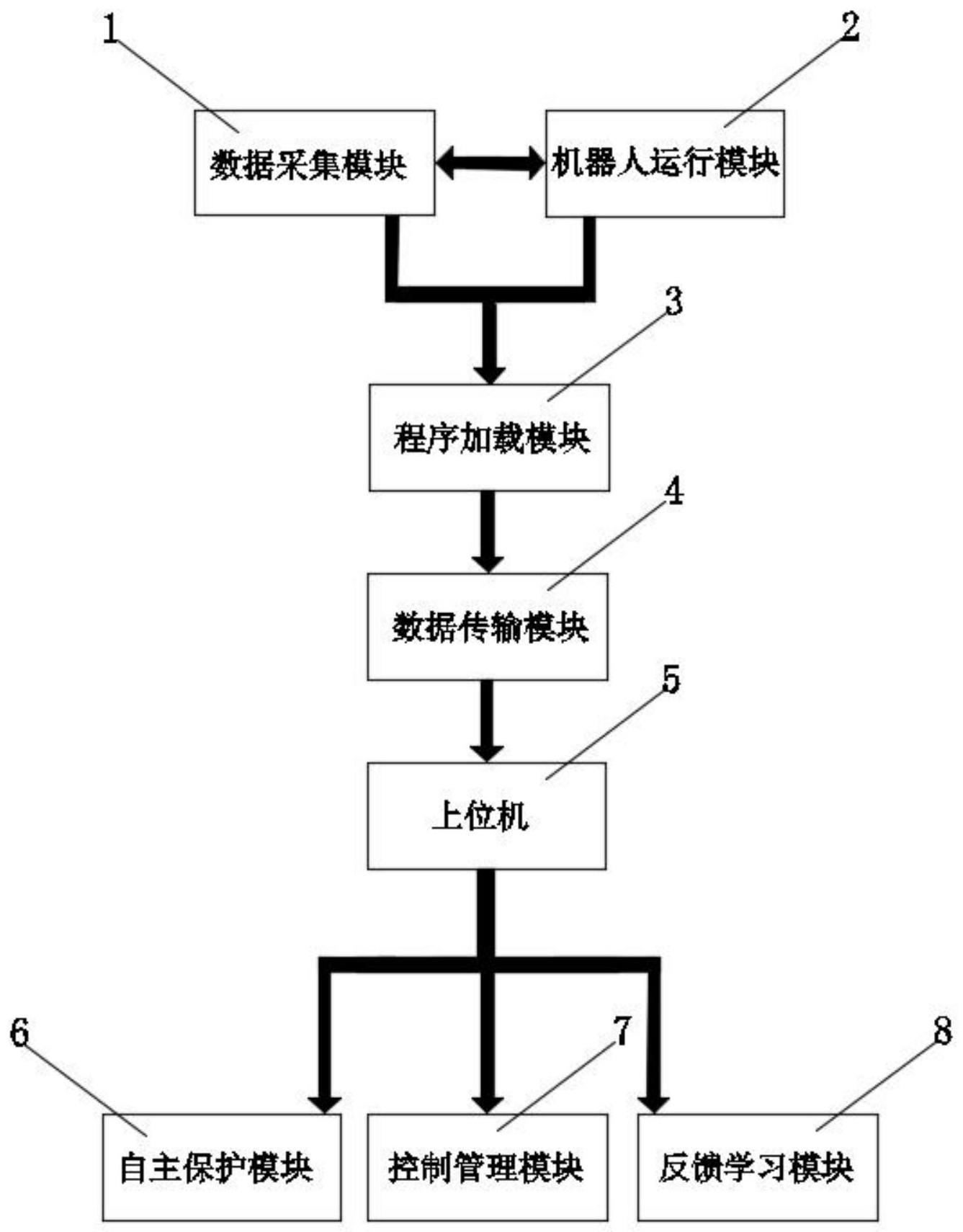
4、为实现以上目的,本发明通过以下技术方案予以实现:一种工业机器人的自动化控制系统,包括数据采集模块,所述数据采集模块双向连接有机器人运行模块,所述数据采集模块和机器人运行模块连接有程序加载模块;
5、所述程序加载模块连接有数据传输模块,所述数据传输模块连接有上位机,所述上位机连接有自主保护模块、控制管理模块和反馈学习模块。
6、优选的,所述数据采集模块包括识别模块和传感器模块,所述传感器模块连接有温度传感器和湿度传感器。
7、优选的,所述识别模块连接有深度相机、前置激光雷达和多线激光雷达。
8、优选的,所述机器人运行模块包括操作加工模块和运行驱动模块,所述运行驱动模块连接有电源组件和动力组。
9、优选的,所述操作加工模块连接有高度调节模块、角度调节模块和定位抓取模块,所述高度调节模块连接有伺服气缸,所述角度调节模块连接有转向舵机,所述定位抓取模块连接有机械手。
10、优选的,所述自主保护模块包括高温保护模块、漏电保护模块和急停模块,所述高温保护模块连接有aida64软件,所述漏电保护模块连接有漏电保护器,所述急停模块连接有自动推进器。
11、优选的,所述控制管理模块包括数据处理模块和数据分析模块,所述数据处理模块连接有图像处理模块和光束操作模块,所述图像处理模块连接有imagej软件,所述光束操作模块连接有lizartech软件。
12、优选的,所述数据分析模块连接有特征提取模块和特征对比模块,所述特征提取模块连接有pyradiomics软件,所述特征对比模块连接有diffimg软件。
13、优选的,所述反馈学习模块包括反馈学习模型,所述反馈学习模型连接有深度学习方法、概率统计方法和稀疏数据重构方法。
14、工作原理:该系统在进行使用时,使用者可通过数据采集模块的传感器模块对加工零件的温度和湿度信息进行采集,并通过深度相机和激光雷达对加工工件的位置进行确定,深度相机和激光雷达对工件的信息进行采集,并通过数据处理模块和数据分析模块实现对图像的特征提取,提升该系统在使用时对加工零件的定位更加精确,装置使用结束后,系统可通过反馈学习模型对数据处理过程进行反馈分析,实现进一步自我学习功能。
15、(三)有益效果
16、本发明提供了一种工业机器人的自动化控制系统。具备以下有益效果:
17、1、本发明提供了一种工业机器人的自动化控制系统,相较于现有的工业机器人自动化控制系统,该自动化控制系统通过在内部设置有上位机,将深度相机和激光雷达所采集的信息进行分析处理,确定机器人需要进行加工装配的零件的位置,实现该机器人的自主控制装配,降低使用者的控制操作难度,提升通过该方法对机器人进行装配加工的工作效率,并且,该机器人可以不需要人员操作,通过程序加载模块设定好程序后可以实现自主运行,避免了人工操作控制所带来的人工成本,降低了该工业机器人整体进行机械零件加工操作的经营成本。
18、2、本发明提供了一种工业机器人的自动化控制系统,相较于现有的工业机器人自动化控制系统,该自动化控制系统通过在其上位机内设置有控制管理模块,控制管理模块包括数据处理模块和数据分析模块,数据处理模块通过imagej软件和lizartech软件对深度相机和激光雷达采集的数据进行处理,数据分析模块通过pyradiomics软件和diffimg软件对图像中的数据进行提取,并通过上位机内置的数据库,对数据特征进行对比,提升该控制系统在进行使用时对加工部位的确定精度,提升该系统使用时的稳定性。
19、3、本发明提供了一种工业机器人的自动化控制系统,相较于现有的工业机器人自动化控制系统,该自动化控制系统通过在其内部设置有反馈学习模块,反馈学习模块内设置有反馈学习模型,装置在使用完成后可以将数据导入到反馈学习模块中,反馈学习模型基于深度学习方法和概率统计方法结合稀疏数据重构方法,使反馈学习模块进行深度学习,提升该系统在使用多次后的功能性,增大该系统的适用范围,提升系统的实用性。
技术特征:
1.一种工业机器人的自动化控制系统,包括数据采集模块(1),其特征在于:所述数据采集模块(1)双向连接有机器人运行模块(2),所述数据采集模块(1)和机器人运行模块(2)连接有程序加载模块(3);
2.根据权利要求1所述的一种工业机器人的自动化控制系统,其特征在于:所述数据采集模块(1)包括识别模块(101)和传感器模块(105),所述传感器模块(105)连接有温度传感器(106)和湿度传感器(107)。
3.根据权利要求2所述的一种工业机器人的自动化控制系统,其特征在于:所述识别模块(101)连接有深度相机(102)、前置激光雷达(103)和多线激光雷达(104)。
4.根据权利要求1所述的一种工业机器人的自动化控制系统,其特征在于:所述机器人运行模块(2)包括操作加工模块(201)和运行驱动模块(208),所述运行驱动模块(208)连接有电源组件(209)和动力组(210)。
5.根据权利要求4所述的一种工业机器人的自动化控制系统,其特征在于:所述操作加工模块(201)连接有高度调节模块(202)、角度调节模块(203)和定位抓取模块(204),所述高度调节模块(202)连接有伺服气缸(205),所述角度调节模块(203)连接有转向舵机(206),所述定位抓取模块(204)连接有机械手(207)。
6.根据权利要求1所述的一种工业机器人的自动化控制系统,其特征在于:所述自主保护模块(6)包括高温保护模块(601)、漏电保护模块(603)和急停模块(605),所述高温保护模块(601)连接有aida64软件(602),所述漏电保护模块(603)连接有漏电保护器(604),所述急停模块(605)连接有自动推进器(606)。
7.根据权利要求1所述的一种工业机器人的自动化控制系统,其特征在于:所述控制管理模块(7)包括数据处理模块(701)和数据分析模块(706),所述数据处理模块(701)连接有图像处理模块(702)和光束操作模块(704),所述图像处理模块(702)连接有imagej软件(703),所述光束操作模块(704)连接有lizartech软件(705)。
8.根据权利要求7所述的一种工业机器人的自动化控制系统,其特征在于:所述数据分析模块(706)连接有特征提取模块(707)和特征对比模块(709),所述特征提取模块(707)连接有pyradiomics软件(708),所述特征对比模块(709)连接有diffimg软件(710)。
9.根据权利要求1所述的一种工业机器人的自动化控制系统,其特征在于:所述反馈学习模块(8)包括反馈学习模型(801),所述反馈学习模型(801)连接有深度学习方法(802)、概率统计方法(803)和稀疏数据重构方法(804)。
技术总结
本发明提供一种工业机器人的自动化控制系统,涉及工业控制机器人技术领域。该工业机器人的自动化控制系统,包括数据采集模块,所述数据采集模块双向连接有机器人运行模块,所述数据采集模块和机器人运行模块连接有程序加载模块,所述程序加载模块连接有数据传输模块,所述数据传输模块连接有上位机,所述上位机连接有自主保护模块、控制管理模块和反馈学习模块。通过在内部设置有上位机,将深度相机和激光雷达所采集的信息进行分析处理,确定机器人需要进行加工装配的零件的位置,实现该机器人的自主控制装配,降低使用者控制难度,提升通过该方法对机器人进行装配加工的工作效率,降低了该工业机器人整体进行机械零件加工操作的经营成本。
技术研发人员:纪旭,郑骊,钟英,吴婕萍,冯丹彤,何鑫海
受保护的技术使用者:成都工业学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!