一种工业机器人机械臂连接装置
本发明涉及连接线连接装置,具体涉及一种工业机器人机械臂连接装置。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,能够自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行。
2、工业机器人包括搬运机器人,在工业生产中,搬运机器人负责将上游产线的物料搬运到下游产线,在液晶面板的黄光部生产线中,每条产线的最后一步是将玻璃基板从上游的产线中通过搬运机器人搬运到炉子进行烘烤,然后再通过搬运机器人将烘烤后的玻璃基板搬运到下游生产线中,由于炉子并排设置,在紧凑的工业厂房内,搬运机器人中的机械臂需要在底座上往复移动,用以完成玻璃基板的搬运,同时由于机械臂与底座之间有很多连接线,现有的方法是将多根连接线共同放置在软管内,随着机械臂的往复移动,软管和连接线共同往复折叠,长时间后,软管容易产生疲劳,进而发生破损,影响搬运机器人的生产安全。
技术实现思路
1、本发明的目的是为了克服现有技术中的问题,提供一种工业机器人机械臂连接装置。
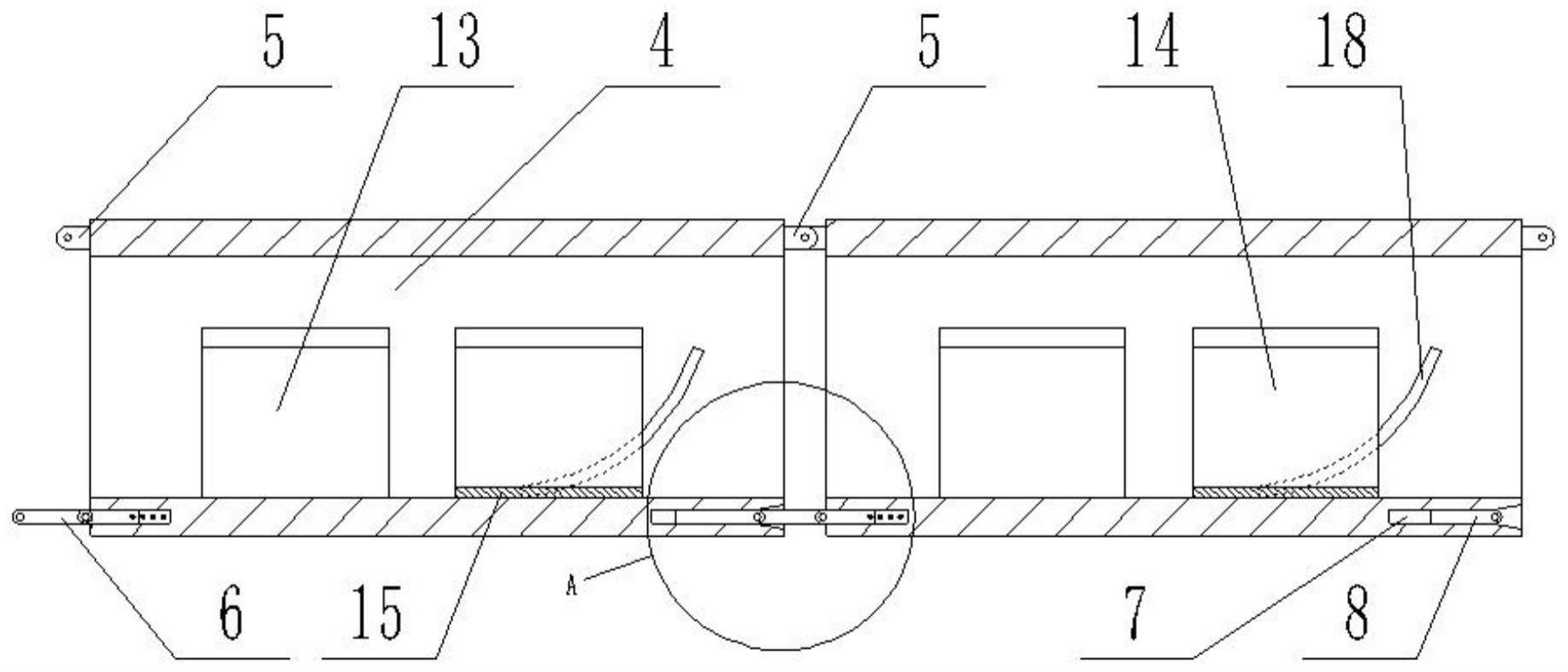
2、本发明提供了一种工业机器人机械臂连接装置,用于连接底座与机械臂之间的连接线,包括:多个框体,相邻两个框体首尾互相连接,一端的框体固定连接在底座上,另一端的框体固定连接在机械臂上,且多个框体均套设在多个连接线上;各框体的两端上部均设有耳板,框体一端下部转动连接有第一杆体,框体的另一端下部设有第一滑槽,第一滑槽内滑动连接滑杆,相邻两个框体之间互相靠近的两个耳板铰接,且相邻两个框体之间互相靠近的滑杆与第一杆体铰接;所述机械臂在底座上移动时,滑杆与第一杆体处于连接线上弯折区的外侧。
3、较佳地,所述框体的下部端面设有第二滑槽,第二滑槽滑动连接第二杆体,第二杆体的一端设有定位孔,定位孔均能够通过铰接杆铰接多个限位孔中的一个,多个限位孔均水平设置在第二滑槽内,第二杆体的另一端铰接所述第一杆体。
4、较佳地,所述框体靠近第一杆体的侧板上固定连接多个用于夹持连接线的第一固定夹。
5、较佳地,所述框体靠近第一滑槽的侧板上设置有第二固定夹,第二固定夹包括底板、两个滑块和多个弧形夹片,所述底板放置在框体靠近第一滑槽的侧板上,底板的两端分别固定连接一个滑块,滑块滑动连接弧形滑槽,两个弧形滑槽分别设置在框体的左右两侧壁上,且框体靠近第一滑槽的侧板上固定多个弧形夹片,多个弧形夹片两两构成一组,用于夹持连接线。
6、较佳地,所述底板的两端分别固定连接挡板,挡板贴近设有弧形滑槽的框体的左右两侧壁,挡板能够防止底板发生横向移动。
7、较佳地,所述第一滑槽的端口设有喇叭口。
8、较佳地,所述框体的上下两侧板均设有多个用于观察连接线分布状况的观察孔。
9、较佳地,所述框体的外表面设有用于增加与底座之间摩擦力的橡胶层。
10、与现有技术相比,本发明的有益效果是:机械臂工作时在底座上往复移动,并且移动过程中牵拉多个首尾互相连接的框体,弯折区的多个框体弯折成u形,机械臂向左移动的过程中,靠近弯折区的底座表面的框体绕相邻(左侧)的框体逆时针转动,转动初时第一杆体既有向右移动也有向上移动的趋势,向右移动的动作能够将滑杆向第一滑槽的外侧适当滑出,但是向右移动的动作和向上移动的动作同时发生,当向右移动到一定距离时,向上移动的动作会限制滑杆继续滑出,使得两个框体弯折成限定的角度,当多个框体同时朝向同一旋转方向弯折时,构成u形;本发明的工业机器人机械臂连接装置的多个框体能够构成内部中空的u形通道,多个连接线在u形通道内适应性弯折,避免了连接线过度弯折,限制了多个连接线的最小弯折半径,避免了连接线发生折断的问题,同时由于框体未发生任何弹性变化,同样避免了软管容易产生疲劳,进而发生破损,影响搬运机器人的生产安全的问题。
技术特征:
1.一种工业机器人机械臂连接装置,用于连接底座(1)与机械臂(2)之间的连接线(3),其特征在于,包括:
2.如权利要求1所述的工业机器人机械臂连接装置,其特征在于,所述框体(4)的下部端面设有第二滑槽(10),第二滑槽(10)滑动连接第二杆体(20),第二杆体(20)的一端设有定位孔(12),定位孔(12)均能够通过铰接杆铰接多个限位孔(11)中的一个,多个限位孔(11)均水平设置在第二滑槽(10)内,第二杆体(20)的另一端铰接所述第一杆体(6)。
3.如权利要求1所述的工业机器人机械臂连接装置,其特征在于,所述框体(4)靠近第一杆体(6)的侧板上固定连接多个用于夹持连接线(3)的第一固定夹(13)。
4.如权利要求1所述的工业机器人机械臂连接装置,其特征在于,所述框体(4)靠近第一滑槽(7)的侧板上设置有第二固定夹(14),第二固定夹(14)包括底板(15)、两个滑块(16)和多个弧形夹片(17),所述底板(15)放置在框体(4)靠近第一滑槽(7)的侧板上,底板(15)的两端分别固定连接一个滑块(16),滑块(16)滑动连接弧形滑槽(18),两个弧形滑槽(18)分别设置在框体(4)的左右两侧壁上,且框体(4)靠近第一滑槽(7)的侧板上固定多个弧形夹片(17),多个弧形夹片(17)两两构成一组,用于夹持连接线(3)。
5.如权利要求4述的工业机器人机械臂连接装置,其特征在于,所述底板(15)的两端分别固定连接挡板(19),挡板(19)贴近设有弧形滑槽(18)的框体(4)的左右两侧壁,挡板(19)能够防止底板(15)发生横向移动。
6.如权利要求1所述的工业机器人机械臂连接装置,其特征在于,所述第一滑槽(7)的端口设有喇叭口。
7.如权利要求1所述的工业机器人机械臂连接装置,其特征在于,所述框体(4)的上下两侧板均设有多个用于观察连接线(3)分布状况的观察孔。
8.如权利要求1所述的工业机器人机械臂连接装置,其特征在于,所述框体(4)的外表面设有用于增加与底座(1)之间摩擦力的橡胶层。
技术总结
本发明公开了一种工业机器人机械臂连接装置,属于连接线连接装置技术领域。该工业机器人机械臂连接装置用于连接底座与机械臂之间的连接线,包括:多个框体,相邻两个框体首尾互相连接,一端的框体固定连接在底座上,另一端的框体固定连接在机械臂上,且多个框体均套设在多个连接线上;各框体的两端上部均设有耳板,框体一端下部转动连接有第一杆体,框体的另一端下部设有第一滑槽,第一滑槽内滑动连接滑杆,相邻两个框体之间互相靠近的两个耳板铰接,且相邻两个框体之间互相靠近的滑杆与第一杆体铰接。本发明的工业机器人机械臂连接装置由于框体未发生任何弹性变化,同样避免了软管容易产生疲劳,进而发生破损,影响搬运机器人的生产安全的问题。
技术研发人员:薛文奎,周斌,张紫霞,吴超,王斌,许文稼,吴玲玲
受保护的技术使用者:常州机电职业技术学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!