代步车、机械臂的控制方法、电子设备及存储介质
本申请实施例涉及但不限于机械臂,尤其涉及代步车、机械臂的控制方法、电子设备及存储介质。
背景技术:
1、目前的部分机械臂是按照预设定的路线进行运行,则只能完成预设定的有限工作和任务。对于不同的任务,需要进行不同的的编程和调试来进行应对,并且对于复杂的工作和环境则难以下手,存在智能化不足的问题。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本申请实施例旨在至少解决现有技术中存在的技术问题之一,本申请实施例提供了机械臂、控制方法、电子设备及存储介质。
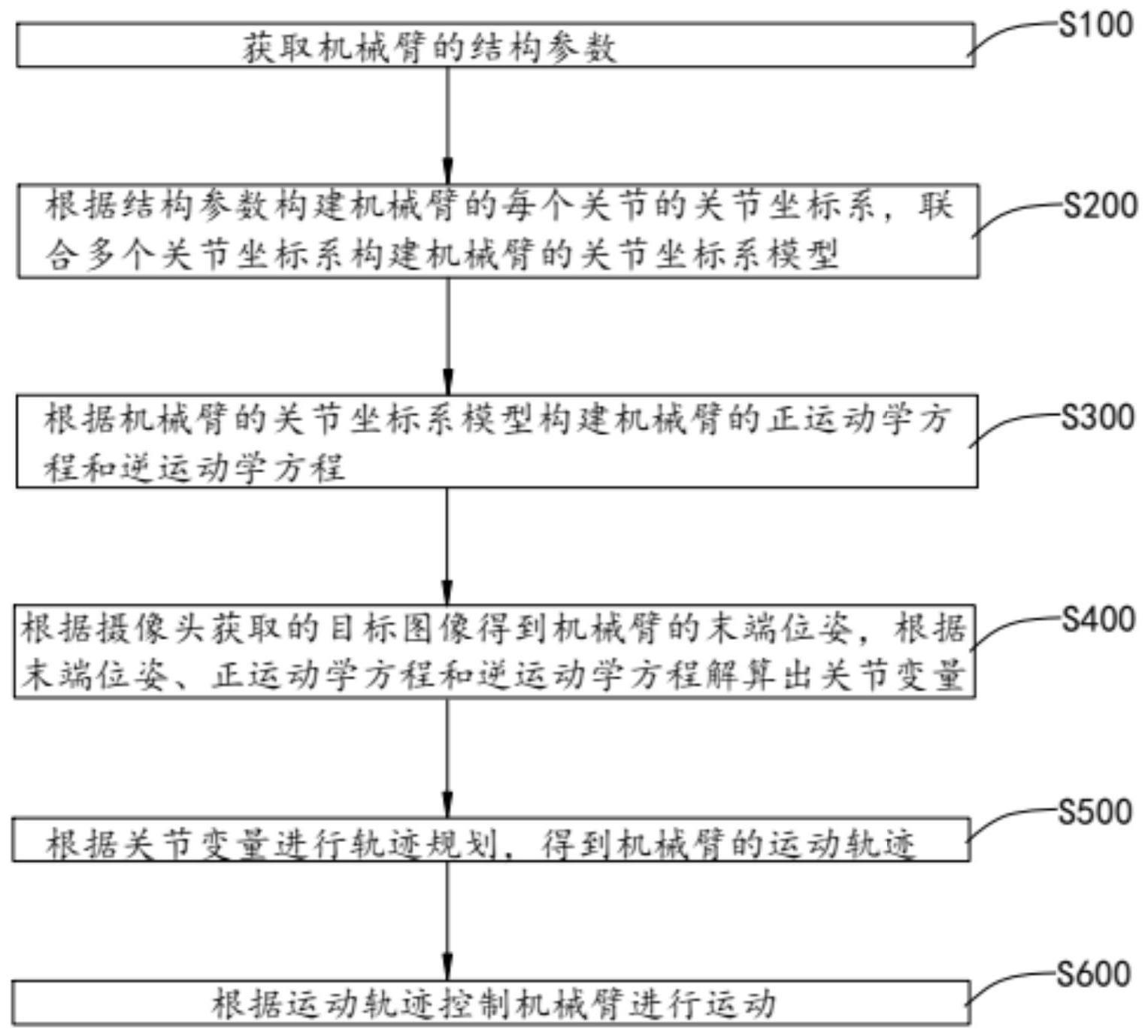
3、本申请的第一方面的实施例,一种机械臂的控制方法,包括:
4、获取所述机械臂的结构参数;
5、根据所述结构参数构建所述机械臂的每个关节的关节坐标系,联合多个所述关节坐标系构建所述机械臂的关节坐标系模型;
6、根据所述机械臂的关节坐标系模型构建所述机械臂的正运动学方程和逆运动学方程;
7、根据所述摄像头获取的目标图像得到机械臂的末端位姿,根据所述末端位姿、所述正运动学方程和所述逆运动学方程解算出关节变量;
8、根据所述关节变量进行轨迹规划,得到所述机械臂的运动轨迹;
9、根据所述运动轨迹控制所述机械臂进行运动。
10、本申请的第一方面的某些实施例,所述根据所述结构参数构建所述机械臂的每个关节的关节坐标系,包括:
11、对每个关节,以关节的旋转轴线作为关节坐标系的z轴,相邻两个关节轴线的公垂线与前一个z轴的交点作为关节坐标系的原点,公垂线所在直线方向作为关节坐标系的x轴,根据所述关节坐标系的z轴、所述关节坐标系的x轴和所述关节坐标系的原点按照右手定则确定关节坐标系的y轴,进而构建关节坐标系。
12、本申请的第一方面的某些实施例,所述联合多个所述关节坐标系构建所述机械臂的关节坐标系模型,包括:
13、联合多个所述关节坐标系确定连杆长度参数、连杆扭转参数、连杆偏移参数和关节转角参数;
14、根据所述连杆长度参数、所述连杆扭转参数、所述连杆偏移参数和所述关节转角参数构建所述机械臂的关节坐标系模型。
15、本申请的第一方面的某些实施例,根据所述机械臂的关节坐标系模型构建所述机械臂的正运动学方程,包括:
16、根据所述机械臂的关节坐标系模型得到多个相邻关节坐标系之间的齐次变换矩阵;
17、根据多个相邻关节坐标系之间的齐次变换矩阵得到所述机械臂的正运动学方程。
18、本申请的第一方面的某些实施例,所述根据所述末端位姿、所述正运动学方程和所述逆运动学方程解算出关节变量,包括:
19、根据所述末端位姿设置各关节的期望位姿;
20、根据各关节的初始位姿和所述期望位姿构建关节角度函数;
21、根据所述正运动学方程、所述逆运动学方程和所述关节角度函数结算出关节变量。
22、本申请的第一方面的某些实施例,所述根据所述关节变量进行轨迹规划,得到所述机械臂的运动轨迹,具体为:通过笛卡尔空间轨迹规划算法根据所述关节变量进行轨迹规划,得到所述机械臂的运动轨迹。
23、本申请的第一方面的某些实施例,所述机械臂设置有抓取爪,所述抓取爪设有包括构成电阻桥的多片电阻应变片的力传感器;
24、所述控制方法包括:
25、对所述力传感器进行静态标定;
26、获取在所述抓取爪处于抓取情况下的经静态标定的力传感器的输出电压;
27、根据所述输出电压得到所述抓取爪的夹持力和力矩;
28、根据所述夹持力和所述力矩调节所述抓取爪。
29、本申请的第二方面的实施例,一种机械臂,设有多个关节,所述机械臂的首端设有摄像头,所述机械臂的末端设有基座;所述机械臂应用如本申请的第一方面的实施例所述的控制方法进行控制。
30、本申请的第三方面的实施例,一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如本申请的第一方面的实施例所述的机械臂的控制方法。
31、本申请的第四方面的实施例,一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如本申请的第一方面的实施例所述的机械臂的控制方法。
32、本申请的实施例通过获取机械臂的结构参数;根据结构参数构建关节坐标系,联合关节坐标系构建关节坐标系模型;根据关节坐标系模型构建正运动学方程和逆运动学方程;根据目标图像得到末端位姿,根据末端位姿、正运动学方程和逆运动学方程解算出关节变量;根据关节变量进行轨迹规划得到运动轨迹;根据运动轨迹控制机械臂运动;能够实现高精准、高灵活性、低延迟的自主机械臂运动。
技术特征:
1.一种机械臂的控制方法,包括:
2.根据权利要求1所述的机械臂的控制方法,其特征在于,所述根据所述结构参数构建所述机械臂的每个关节的关节坐标系,包括:
3.根据权利要求2所述的机械臂的控制方法,其特征在于,所述联合多个所述关节坐标系构建所述机械臂的关节坐标系模型,包括:
4.根据权利要求1所述的机械臂的控制方法,其特征在于,根据所述机械臂的关节坐标系模型构建所述机械臂的正运动学方程,包括:
5.根据权利要求1所述的机械臂的控制方法,其特征在于,所述根据所述末端位姿、所述正运动学方程和所述逆运动学方程解算出关节变量,包括:
6.根据权利要求1所述的机械臂的控制方法,其特征在于,所述根据所述关节变量进行轨迹规划,得到所述机械臂的运动轨迹,具体为:通过笛卡尔空间轨迹规划算法根据所述关节变量进行轨迹规划,得到所述机械臂的运动轨迹。
7.根据权利要求1所述的机械臂的控制方法,其特征在于,所述机械臂设置有抓取爪,所述抓取爪设有包括构成电阻桥的多片电阻应变片的力传感器;
8.一种代步车,其特征在于,所述代步车设有机械臂,所述机械臂设有多个关节,所述机械臂的首端设有摄像头,所述机械臂的末端设有基座;所述机械臂应用如权利要求1至7任一项所述的控制方法进行控制。
9.一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述的机械臂的控制方法。
10.一种计算机可读存储介质,其特征在于,存储有计算机可执行指令,所述计算机可执行指令用于执行如权利要求1至7中任一项所述的机械臂的控制方法。
技术总结
本申请实施例提供了代步车、机械臂的控制方法、电子设备及存储介质,其中控制方法包括获取机械臂的结构参数;根据结构参数构建关节坐标系,联合关节坐标系构建关节坐标系模型;根据关节坐标系模型构建正运动学方程和逆运动学方程;根据目标图像得到末端位姿,根据末端位姿、正运动学方程和逆运动学方程解算出关节变量;根据关节变量进行轨迹规划得到运动轨迹;根据运动轨迹控制机械臂运动;能够实现高精准、高灵活性、低延迟的自主机械臂运动。
技术研发人员:张建民,郑名杜,巫天华,陈浩源,李康权,郭晓煊,孙龙,郭金宇,郑凯明,龙佳乐,黄辉,莫文迪,谭钰铭
受保护的技术使用者:五邑大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!