一种保密环境下的无硬连接的多移动机器人协同搬运方法
本发明涉及一种保密环境下的无硬连接的多移动机器人协同搬运方法,属于多移动机器人搬运。
背景技术:
1、目前国际形势复杂,导致越来越多的保密单位产生了重载大型设备或者器件的自动化搬运需求。这些需求有以下特点:
2、1.尺寸特别大,大多是超规格尺寸的,比如特别长、特别扁平或者宽大等
3、2.重量特别大,大多是数吨或数十吨的
4、3.大多处于保密环境中,不可使用无线通信,包含但不限于4g/5g手机网络、wifi、蓝牙等。
5、4.种类特别多,每种可能数量不多,但是种类特别多。
6、基于以上这些特点,就衍生出了对这些场景下的自动化搬运移动机器人的需求:
7、1.灵活性高,一定是既能单独使用,又可以若干台组合起来使用的。
8、2.载重大,单车至少得是数吨级或数十吨级的搬运能力。
9、3.不可使用无线通信,所以大多是定制化的,使用站点式通信的,或者采用预设固定路线的方式
10、4.可靠性高
11、不建议使用硬连接的方式,因为搬运物的种类繁多,大平台并不一定能适用所有搬运物,且大平台很占存放空间且会增加企业成本。
技术实现思路
1、本发明的目的在于提供一种保密环境下的无硬连接的多移动机器人协同搬运方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种保密环境下的无硬连接的多移动机器人协同搬运方法,所述保密环境下的无硬连接的多移动机器人协同搬运方法步骤如下:
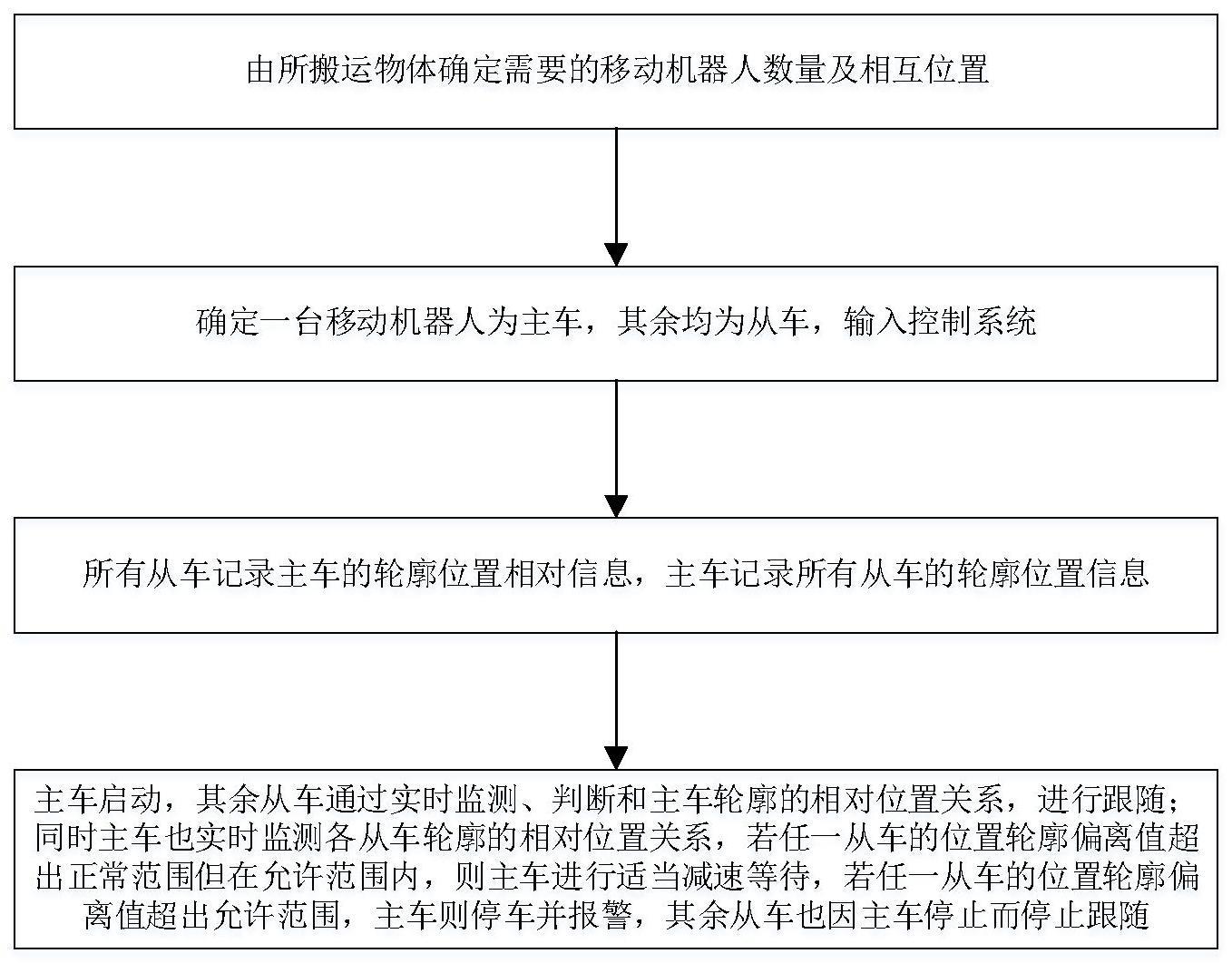
3、步骤一:由所搬运物体确定需要的移动机器人数量及相互位置;
4、步骤二:确定一台移动机器人为主车,其余均为从车,输入控制系统;
5、步骤三:所有从车记录主车的轮廓位置相对信息,主车记录所有从车的轮廓位置信息;
6、步骤四:主车启动,其余从车通过实时监测、判断和主车轮廓的相对位置关系,进行跟随;同时主车也实时监测各从车轮廓的相对位置关系,若任一从车的位置轮廓偏离值超出正常范围但在允许范围内,则主车进行适当减速等待,若任一从车的位置轮廓偏离值超出允许范围,主车则停车并报警,其余从车也因主车停止而停止跟随。
7、作为本发明的一种优选技术方案,所述步骤二中,所述主车和其余配车各自有配备一台2d平面扫描激光测距雷达,可以获取360°范围内的物体距离信息,即360°范围内障碍物的轮廓信息,角分辨率在到0.1°及以内。
8、作为本发明的一种优选技术方案,所述步骤一中,主车和从车相互确定相对位置关系后,通过激光测距雷达的信息,各自得知了对方车体的轮廓信息做为标定数据。
9、作为本发明的一种优选技术方案,所述步骤三中,开始搬运后,主车a缓慢启动,从车b通过激光轮廓得知主车a偏离标定值后,进行加速跟随。
10、作为本发明的一种优选技术方案,所述步骤四中,运行过程,从车实时通过激光轮廓的位置信息进行位姿调整,从而实现跟随运动,而主车也实时通过激光轮廓的位置信息监测从车跟随情况,如果超过一个允许范围内的偏离,则减速等待,若超过一个较大的偏离值,则停车报警。
11、与现有技术相比,本发明的有益效果是:本发明一种保密环境下的无硬连接的多移动机器人协同搬运方法,
12、1.通过激光测距雷达跟踪的方式,解决了保密环境下的多重载移动机器人的协同搬运问题;
13、2.激光测距的精度高,轮廓位置信息较为准确,跟随精度高;
14、3.省去了硬连接的大平台,减少企业成本,增加了自动化搬运系统的柔性、灵活性;
15、4.主车和从车都有对方的位置信息,这样一旦任一从车出现跟随偏离,位置偏离超出允许值,主车停车,其他的从车也会因此停车,提高了整体搬运系统的可靠性。
技术特征:
1.一种保密环境下的无硬连接的多移动机器人协同搬运方法,其特征在于,所述保密环境下的无硬连接的多移动机器人协同搬运方法步骤如下:
2.根据权利要求1所述的一种保密环境下的无硬连接的多移动机器人协同搬运方法,其特征在于:所述步骤二中,所述主车和其余配车各自有配备一台2d平面扫描激光测距雷达,可以获取360°范围内的物体距离信息,即360°范围内障碍物的轮廓信息,角分辨率在到0.1°及以内。
3.根据权利要求1所述的一种保密环境下的无硬连接的多移动机器人协同搬运方法,其特征在于:所述步骤一中,主车和从车相互确定相对位置关系后,通过激光测距雷达的信息,各自得知了对方车体的轮廓信息做为标定数据。
4.根据权利要求1所述的一种保密环境下的无硬连接的多移动机器人协同搬运方法,其特征在于:所述步骤三中,开始搬运后,主车a缓慢启动,从车b通过激光轮廓得知主车a偏离标定值后,进行加速跟随。
5.根据权利要求1所述的一种保密环境下的无硬连接的多移动机器人协同搬运方法,其特征在于:所述步骤四中,运行过程,从车实时通过激光轮廓的位置信息进行位姿调整,从而实现跟随运动,而主车也实时通过激光轮廓的位置信息监测从车跟随情况,如果超过一个允许范围内的偏离,则减速等待,若超过一个较大的偏离值,则停车报警。
技术总结
本发明公开了一种保密环境下的无硬连接的多移动机器人协同搬运方法,所述保密环境下的无硬连接的多移动机器人协同搬运方法步骤如下:步骤一:由所搬运物体确定需要的移动机器人数量及相互位置;步骤二:确定一台移动机器人为主车,其余均为从车,输入控制系统;步骤三:所有从车记录主车的轮廓位置相对信息,主车记录所有从车的轮廓位置信息;步骤四:主车从车运动判断,本发明一种保密环境下的无硬连接的多移动机器人协同搬运方法,通过激光测距雷达跟踪的方式,解决了保密环境下的多重载移动机器人的协同搬运问题;激光测距的精度高,轮廓位置信息较为准确,跟随精度高。
技术研发人员:张沪松,楼佩煌,张悦,孙天
受保护的技术使用者:南京航空航天大学苏州研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!