防止机器人阻挡电梯的落位方法、装置及相关产品与流程
【】本发明涉及机器人,尤其涉及一种防止机器人阻挡电梯的落位方法、装置及相关产品。
背景技术
0、
背景技术:
1、随着机器人技术的不断发展,采用机器人进行自动配送等任务已经在很多楼宇中得到了应用。机器人在跨楼层执行任务时,需要乘电梯前往目的地,当执行任务的电梯组包括多个电梯且需要乘梯的机器人为多个时,机器人需要进行选梯、等梯、呼梯等一系列动作,该种情景下,就会出现有的机器人在呼梯、等梯,而有的机器人在乘梯、出梯,如果机器人等待的电梯正好有机器人同时要出梯,就会出现两个机器人在电梯门口拥堵的问题,甚至造成人员无法出梯。为此有人将机器人的停靠位置远离电梯门或者排列在电梯两侧,这显然可以避免机器人阻挡电梯,但也导致机器人在电梯门前浪费较多的时间才能完成进梯,而且即使机器人停靠在电梯门两侧的位置,如果两侧的点位被占,机器人仍然会停靠在电梯门前,也会造成阻挡电梯情况的发生。
2、鉴于此,实有必要提供一种新型的防止机器人阻挡电梯的落位方法、装置及相关产品以克服上述缺陷。
技术实现思路
0、
技术实现要素:
1、本发明的目的是提供一种防止机器人阻挡电梯的落位方法、装置及相关产品,可以实现机器人根据实时信息进行落位等梯,避免造成堵电梯的情况发生,同时停靠更加灵活,提升了乘梯的效率。
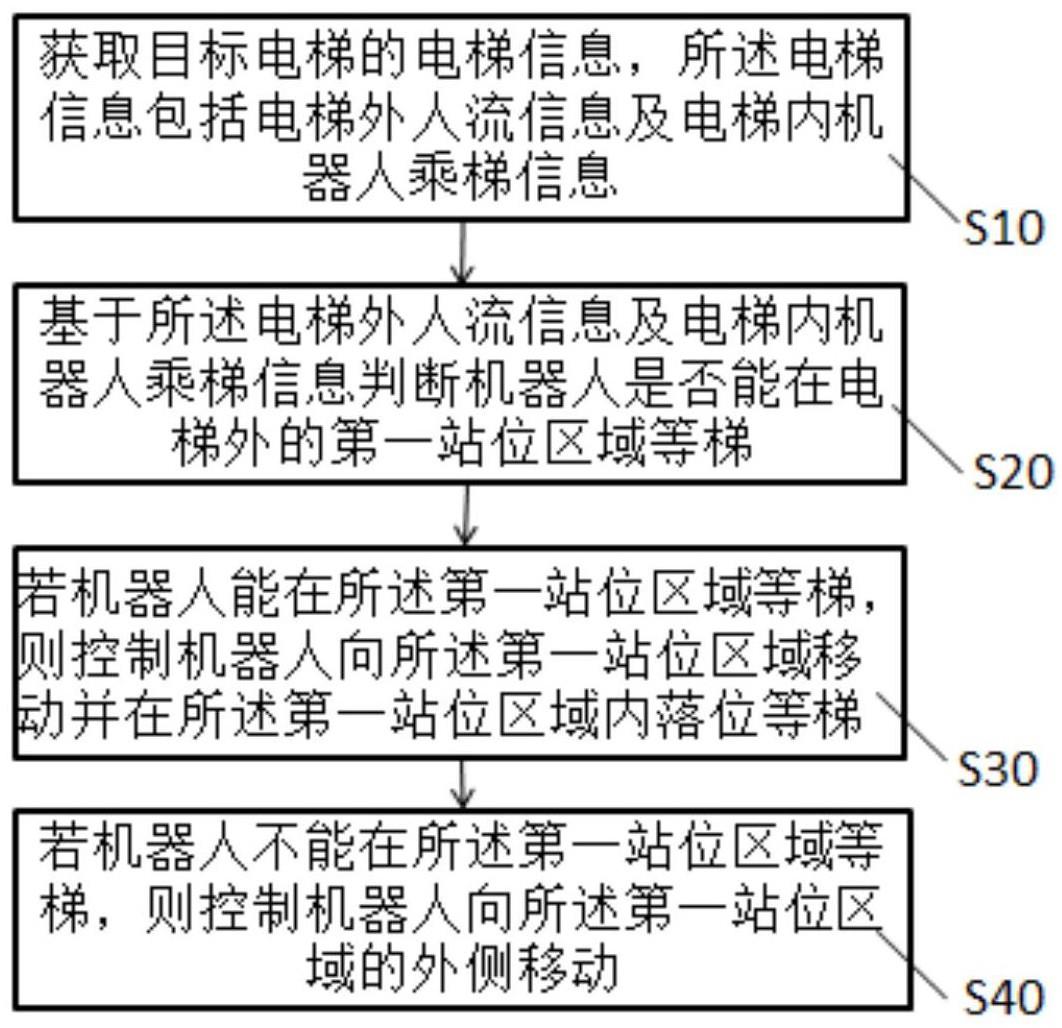
2、为了实现上述目的,第一方面,本发明提供一种防止机器人阻挡电梯的落位方法,包括如下步骤:获取目标电梯的电梯信息,所述电梯信息包括电梯外人流信息及电梯内机器人乘梯信息;基于所述电梯外人流信息及电梯内机器人乘梯信息判断机器人是否能在电梯外的第一站位区域等梯;若机器人能在所述第一站位区域等梯,则控制机器人向所述第一站位区域移动并在所述第一站位区域内落位等梯;若机器人不能在所述第一站位区域等梯,则控制机器人向所述第一站位区域的外侧移动。
3、在一个优选实施方式中,基于所述电梯外人流信息及电梯内机器人乘梯信息判断是否能在电梯外的第一站位区域等梯的步骤,包括:基于所述电梯外人流信息判断所述第一站位区域是否存在空闲点位;基于所述电梯内机器人乘梯信息判断所述目标电梯内是否存在乘梯机器人;若所述第一站位区域存在空闲点位,且所述目标电梯内不存在第二机器人,则确认机器人能在所述第一站位区域等梯;若所述第一站位区域不存在空闲点位,或者,所述目标电梯内存在第二机器人,则确认机器人不能在所述第一站位区域等梯。
4、在一个优选实施方式中,所述第一站位区域包括目标点位;若机器人能在所述第一站位区域等梯,则控制机器人向所述第一站位区域移动并在所述第一站位区域内落位等梯的步骤,包括:控制机器人向所述第一站位区域的目标点位移动;在移动的过程中实时获取所述第一站位区域的人流信息;基于第一站位区域的人流信息判断所述目标点位是否被占;若所述目标点位被占,则选择所述目标点位附近的空闲点位停靠,或者,在所述目标点位的预设半径范围内寻找空闲点位停靠。
5、在一个优选实施方式中,若机器人不能在所述第一站位区域等梯,则控制机器人向所述第一站位区域的外侧移动的步骤,包括:控制机器人向所述第一站位区域外的第二站位区域移动,并在第二站位区域内的靠近第一站位区域边缘的空闲点位停靠。
6、在一个优选实施方式中,还包括:若第二站位区域存在障碍物无法到达,则控制机器人向所述第二站位区域外的第三站位区域移动并在第三站位区域内落位等梯。
7、在一个优选实施方式中,所述电梯信息还包括电梯内人流信息;若所述电梯内人流信息超过预设阈值,则选择所述目标点位附近的空闲点位停靠,或者,在所述目标点位的预设半径范围内寻找空闲点位停靠。
8、在一个优选实施方式中,获取目标电梯的电梯信息包括:通过电梯内摄像头获取,或者,通过与电梯通讯获取,或者,通过与云端通讯获取。
9、第二方面,本发明提供一种防止机器人阻挡电梯的落位装置,包括:获取模块,用于获取目标电梯的电梯信息,所述电梯信息包括电梯外人流信息及电梯内机器人乘梯信息;判断模块,用于基于所述电梯外人流信息及电梯内机器人乘梯信息判断机器人是否能在电梯外的第一站位区域等梯;移动控制模块,用于当机器人能在所述第一站位区域等梯时控制机器人向所述第一站位区域移动并在所述第一站位区域内落位等梯;所述移动控制模块还用于当若机器人不能在所述第一站位区域等梯时控制机器人向所述第一站位区域的外侧移动。
10、本发明第二方面提供的防止机器人阻挡电梯的落位装置在实施时,可以采用本发明第一方面任一实施例中所述的防止机器人阻挡电梯的落位方法实现机器人顺利落位等梯。
11、第三方面,本发明还提供一种计算机设备,包括:存储器及一个或多个处理器;所述存储器,用于存储一个或多个计算机程序;当所述一个或多个计算机程序被所述一个或多个处理器执行时,实现本发明第一方面任一实施例所述的防止机器人阻挡电梯的落位方法。
12、第四方面,本发明还提供一种计算机存储介质,计算机存储介质内存储有计算机程序,所述计算机程序被处理器执行时,实现本发明第一方面任一实施例所述的防止机器人阻挡电梯的落位方法。
13、第五方面,本发明还提供一种计算机程序产品,包括计算机程序或者指令,所述计算机程序或者指令被处理器执行时实现本发明第一方面任一实施例所述的防止机器人阻挡电梯的落位方法。
14、相比于现有技术,本发明提供的防止机器人阻挡电梯的落位方法、装置及相关产品,先获取目标电梯的电梯信息,所述电梯信息包括电梯外人流信息及电梯内机器人乘梯信息,再基于所述电梯外人流信息及电梯内机器人乘梯信息判断机器人是否能在电梯外的第一站位区域等梯,若机器人能在所述第一站位区域等梯,则控制机器人向所述第一站位区域移动并在所述第一站位区域内落位等梯,若机器人不能在所述第一站位区域等梯,则控制机器人向所述第一站位区域的外侧移动,如此设计,可以实现机器人根据实时信息进行落位等梯,避免造成堵电梯的情况发生,同时停靠更加灵活,提升了乘梯的效率。
技术特征:
1.一种防止机器人阻挡电梯的落位方法,其特征在于,包括如下步骤:
2.如权利要求1所述的防止机器人阻挡电梯的落位方法,其特征在于,基于所述电梯外人流信息及电梯内机器人乘梯信息判断是否能在电梯外的第一站位区域等梯的步骤,包括:
3.如权利要求1所述的防止机器人阻挡电梯的落位方法,其特征在于,所述第一站位区域包括目标点位;若机器人能在所述第一站位区域等梯,则控制机器人向所述第一站位区域移动并在所述第一站位区域内落位等梯的步骤,包括:
4.如权利要求1所述的防止机器人阻挡电梯的落位方法,其特征在于,若机器人不能在所述第一站位区域等梯,则控制机器人向所述第一站位区域的外侧移动的步骤,包括:
5.如权利要求4所述的防止机器人阻挡电梯的落位方法,其特征在于,还包括:若第二站位区域存在障碍物无法到达,则控制机器人向所述第二站位区域外的第三站位区域移动并在第三站位区域内落位等梯。
6.如权利要求3所述的防止机器人阻挡电梯的落位方法,其特征在于,所述电梯信息还包括电梯内人流信息;若所述电梯内人流信息超过预设阈值,则选择所述目标点位附近的空闲点位停靠,或者,在所述目标点位的预设半径范围内寻找空闲点位停靠。
7.如权利要求1所述的防止机器人阻挡电梯的落位方法,其特征在于,获取目标电梯的电梯信息包括:通过电梯内摄像头获取,或者,通过与电梯通讯获取,或者,通过与云端通讯获取。
8.一种防止机器人阻挡电梯的落位装置,其特征在于,包括:
9.一种计算机设备,包括:存储器及一个或多个处理器,所述存储器,用于存储一个或多个计算机程序;其特征在于,当所述一个或多个计算机程序被所述一个或多个处理器执行时,实现如权利要求1-7任意一项所述的防止机器人阻挡电梯的落位方法。
10.一种计算机存储介质,计算机存储介质内存储有计算机程序;其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-7任意一项所述的防止机器人阻挡电梯的落位方法。
技术总结
本发明提供一种防止机器人阻挡电梯的落位方法、装置及相关产品,所述方法包括如下步骤:获取目标电梯的电梯信息,所述电梯信息包括电梯外人流信息及电梯内机器人乘梯信息;基于所述电梯外人流信息及电梯内机器人乘梯信息判断机器人是否能在电梯外的第一站位区域等梯;若机器人能在所述第一站位区域等梯,则控制机器人向所述第一站位区域移动并在所述第一站位区域内落位等梯;若机器人不能在所述第一站位区域等梯,则控制机器人向所述第一站位区域的外侧移动。本发明可以实现机器人根据实时信息进行落位等梯,避免造成堵电梯的情况发生,同时停靠更加灵活,提升了乘梯的效率。
技术研发人员:牟其龙
受保护的技术使用者:上海有个机器人有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!