一种大型储罐焊缝磁粉检测机器人的制作方法
本发明涉及焊缝检测,具体为一种大型储罐焊缝磁粉检测机器人。
背景技术:
1、目前大型储罐的在使用一定的期限之后,为了保证大型储罐的使用安全性,需要进行磁粉检测。由于大型储罐比较高,目前,通常是在罐体内外搭设整体脚手架,通过人工进行检测,但是该种方式高空作业有一定的安全风险,耗费大量的人力和时间,需要花费很多搭设脚手架和拆除脚手架的费用。目前,市面上有采用磁粉检测机器人来对储罐焊缝进行检测,磁粉检测机器人在检测时通常是移动至焊缝处后,向焊缝处喷洒磁粉,再进行焊缝的磁粉检测,相比人工虽然使用磁粉检测机器人进行焊缝的检测,安全性高,使用成本降低,但是现有的磁粉检测机器人在向焊缝喷洒磁悬液前不能对焊缝处进行处理,因为储罐使用一定期限,其外壁难免会残留有杂质等,如果在检测前不对焊缝处进行处理,会影响磁粉检测结果的精准度,对检测的结果产生不利的影响。
技术实现思路
1、本发明的目的在于提供一种大型储罐焊缝磁粉检测机器人,以解决上述背景技术中提出的现有的磁粉检测机器人在向焊缝喷洒磁悬液前不能对焊缝处进行处理,容易受到储罐外壁残留的杂质等影响,导致磁粉检测结果的精准度较差的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种大型储罐焊缝磁粉检测机器人,包括机架,所述机架的两侧均设有电磁履带机构,所述机架上表面设有旋转装置,所述旋转装置输出端设有连接架,所述连接架的底面两侧均对称设有两组机械连接臂,一侧的两组所述机械连接臂上设有对焊缝喷洒液体的供液部,另一侧的两组所述机械连接臂上设有对焊缝打磨的打磨组件,所述机架的一侧通过支架设有对喷液后的焊缝进行检测的检测仪主体;其中,
4、所述供液部包括喷气嘴、喷液嘴、供液组件和供风装置;所述喷气嘴、喷液嘴分别设于一侧的两组机械连接臂上,所述供液组件设于连接架上,用于向喷液嘴提供液体,所述供风装置的输出端通过管道与喷气嘴连接。
5、进一步改进在于,所述供液组件包括储液壳和供液泵;
6、所述储液壳设于连接架上,所述储液壳内开设有用于储放清洗液的储液腔一和用于储放磁悬液的储液腔二;
7、所述供液泵的输入端通过连接管道部件与储液腔一、储液腔二连通,所述供液泵的输出端通过管道连通喷液嘴。
8、进一步改进在于,所述连接管道部件包括导向壳,所述导向壳的入口端通过两组支管分别与储液腔一、储液腔二连通,且支管内设有电磁阀,所述导向壳的出口端通过管道连接供液泵,所述导向壳内设有叶轮部件,所述叶轮部件的轴贯穿导向壳外壁,且叶轮部件由进入导向壳内的液体驱使旋转;
9、所述储液腔一、储液腔二内均转动设有搅拌杆,所述搅拌杆外壁设有多组搅拌叶片,所述搅拌杆的一端贯穿导向壳外壁并与叶轮部件的轴通过链轮传动组传动连接。
10、进一步改进在于,所述机架的一侧通过支架设有采集焊缝图像数据的摄像头装置,所述检测仪主体为磁粉检测仪,所述摄像头装置和检测仪主体均电连接远程移动终端。
11、进一步改进在于,所述打磨组件包括调整部、打磨装置、吸尘嘴以及收集部;所述调整部和吸尘嘴分别设于一侧的两组机械连接臂上,所述打磨装置设于调整部上,所述打磨装置设于调整部上,用于通过调整部调整打磨位置,所述吸尘嘴通过管道连通收集部,所述收集部设于连接架上。
12、进一步改进在于,所述调整部包括设于机械连接臂上的电动导轨;所述打磨装置设于电动导轨上并沿电动导轨移动。
13、进一步改进在于,所述收集部包括收集壳、引风装置、收集盒、滤网、导向板、防堵除杂组件、导向壳以及随动叶轮;
14、所述收集壳设于连接架上;所述引风装置的输入端通过管道与吸尘嘴连通,输出端通过管道贯穿收集壳并与导向壳的进料口连通;
15、所述收集盒设于收集壳内腔底部,且收集盒的一端贯穿收集壳侧壁,所述收集盒的内腔底面可拆卸设有粘尘膜;
16、所述滤网倾斜设于收集壳内且位于导向壳和收集盒之间;
17、所述导向板倾斜设于滤网和导向壳之间,所述导向板朝下的一端朝向滤网朝上的一端,所述导向板朝上的一端与导向壳的下料口对应;
18、所述防堵除杂组件设于导向板上,用于驱使滤网振动;
19、所述导向壳设于收集壳内腔上端,所述随动叶轮通过叶轮轴设于导向壳内,且叶轮轴一端贯穿导向壳,用于在随动叶轮旋转时驱使防堵除杂组件工作。
20、进一步改进在于,所述防堵除杂组件包括凸轮、活动杆、敲击杆、卸料座、活动门、导向轮架以及拉绳;
21、所述凸轮套设于叶轮轴外壁;
22、所述活动杆竖直插设于导向板上,所述活动杆呈l形,所述活动杆的短边与凸轮滑动抵接,由凸轮驱使上下移动,所述活动杆的底端穿过卸料座,并延伸至卸料座下方,所述活动杆和导向板的连接处设有驱使活动杆复位的弹簧;
23、所述敲击杆一端连接活动杆,另一端通过球体与滤网顶部接触;
24、所述卸料座上下端均为中空,且卸料座插设于滤网朝下的一端;
25、所述活动门设有两组,对称插设于卸料座外壁底部,且活动门的外端通过弹簧与卸料座外壁连接;
26、所述导向轮架至少设有两组,分别设于卸料座底部两端;
27、所述拉绳的一端连接活动门外端,另一端绕过相对应的导向轮架并与活动杆另一端连接,用于在活动杆向上时拉动两组活动门相互远离移动。
28、进一步改进在于,所述机械连接臂包括臂体、u形架、驱动装置和伸缩装置;
29、所述臂体平行设于连接架一侧;
30、所述u形架设于臂体内侧外端,所述u形架内通过转轴转动连接喷气嘴、喷液嘴、电动导轨或吸尘嘴,所述驱动装置用于驱使转轴旋转,调整喷气嘴、喷液嘴、电动导轨或吸尘嘴的角度;
31、所述伸缩装置用于驱使臂体相对于连接架上下移动。
32、进一步改进在于,还包括嵌设于连接架上的电器部,所述电器部包括外壳、供电装置、无线通信装置和控制装置;
33、所述供电装置、无线通信装置和控制装置均设于外壳内;
34、所述无线通信装置和控制装置电连接遥控器主体。
35、与现有技术相比,本发明的有益效果是:
36、本发明在对焊缝进行检测前,可通过旋转装置带动连接架,使得打磨组件对应焊缝,通过打磨装置对焊缝进行打磨,使得焊缝处露出金属光泽,提高后续渗透检测的精准度,随后在通过旋转装置带动连接架,使得供液部对应焊缝,供液部向喷液嘴处供入液体对焊缝进行清洗,随后通过供风装置和喷气嘴可对清洗后的焊缝干燥,再通过供液部向喷液嘴处供入磁悬液配合检测仪主体进行检测,有效的提高检测结果的精准度,检测自动化,操作简单,能够大大减轻工人的体力劳动,没有高空作业的安全风险。
技术特征:
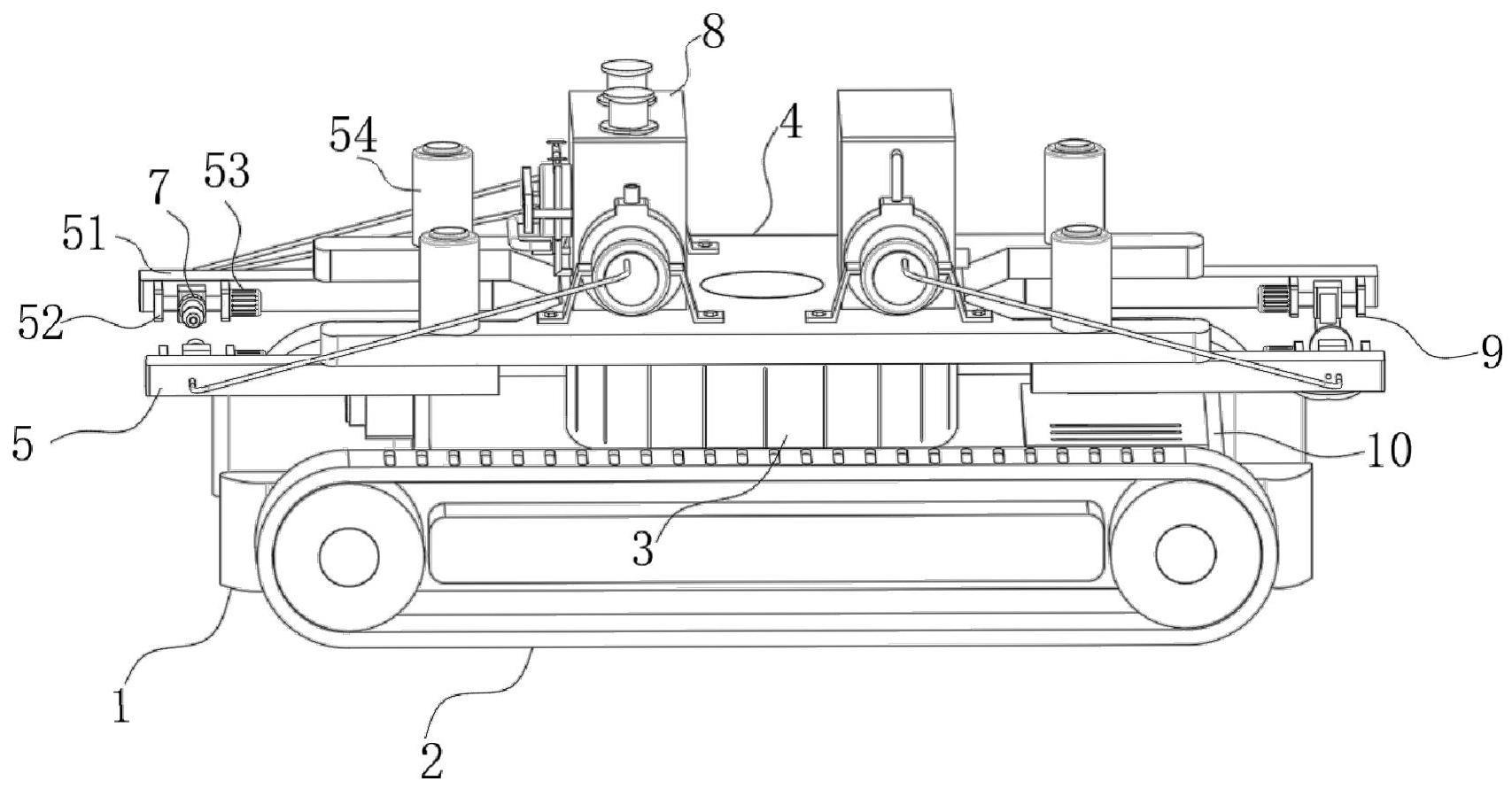
1.一种大型储罐焊缝磁粉检测机器人,包括机架(1),所述机架(1)的两侧均设有电磁履带机构(2),其特征在于:所述机架(1)上表面设有旋转装置(3),所述旋转装置(3)输出端设有连接架(4),所述连接架(4)的底面两侧均对称设有两组机械连接臂(5),一侧的两组所述机械连接臂(5)上设有对焊缝喷洒液体的供液部,另一侧的两组所述机械连接臂(5)上设有对焊缝打磨的打磨组件(9),所述机架(1)的一侧通过支架设有对喷液后的焊缝进行检测的检测仪主体(13);其中,
2.根据权利要求1所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述供液组件(8)包括储液壳(81)和供液泵(88);
3.根据权利要求2所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述连接管道部件包括导向壳(86),所述导向壳(86)的入口端通过两组支管分别与储液腔一(82)、储液腔二(83)连通,且支管内设有电磁阀,所述导向壳(86)的出口端通过管道连接供液泵(88),所述导向壳(86)内设有叶轮部件,所述叶轮部件的轴贯穿导向壳(86)外壁,且叶轮部件由进入导向壳(86)内的液体驱使旋转;
4.根据权利要求1所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述机架(1)的一侧通过支架设有采集焊缝图像数据的摄像头装置(11),所述检测仪主体(13)为磁粉检测仪,所述摄像头装置(11)和检测仪主体(13)均电连接远程移动终端。
5.根据权利要求1所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述打磨组件(9)包括调整部、打磨装置(92)、吸尘嘴(93)以及收集部;所述调整部和吸尘嘴(93)分别设于一侧的两组机械连接臂(5)上,所述打磨装置(92)设于调整部上,所述打磨装置(92)设于调整部上,用于通过调整部调整打磨位置,所述吸尘嘴(93)通过管道连通收集部,所述收集部设于连接架(4)上。
6.根据权利要求5所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述调整部包括设于机械连接臂(5)上的电动导轨(91);所述打磨装置(92)设于电动导轨(91)上并沿电动导轨(91)移动。
7.根据权利要求5所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述收集部包括收集壳(94)、引风装置(95)、收集盒(96)、滤网(97)、导向板(98)、防堵除杂组件(99)、导向壳(910)以及随动叶轮(911);
8.根据权利要求7所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述防堵除杂组件(99)包括凸轮(991)、活动杆(992)、敲击杆(993)、卸料座(994)、活动门(995)、导向轮架(996)以及拉绳(997);
9.根据权利要求6所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:所述机械连接臂(5)包括臂体(51)、u形架(52)、驱动装置(53)和伸缩装置(54);
10.根据权利要求1所述的一种大型储罐焊缝磁粉检测机器人,其特征在于:还包括嵌设于连接架(4)上的电器部(10),所述电器部(10)包括外壳(101)、供电装置(102)、无线通信装置(103)和控制装置(104);
技术总结
本发明公开了一种大型储罐焊缝磁粉检测机器人,包括机架,所述机架的两侧均设有电磁履带机构,所述机架上表面设有旋转装置,所述旋转装置输出端设有连接架,所述连接架的底面两侧均对称设有两组机械连接臂,一侧的两组所述机械连接臂上设有对焊缝喷洒液体的供液部,另一侧的两组所述机械连接臂上设有对焊缝打磨的打磨组件。本发明通过打磨装置对焊缝进行打磨,使得焊缝处露出金属光泽,提高后续渗透检测的精准度,随后供液部向喷液嘴处供入液体对焊缝进行清洗,清洗后进行焊缝干燥处理,处理后进行检测,有效的提高检测结果的精准度,检测自动化,操作简单,能够大大减轻工人的体力劳动,没有高空作业的安全风险。
技术研发人员:曹子沛,黄海峰,邹明昊
受保护的技术使用者:安徽华昇检测科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!