水平多关节机器人的制作方法
本发明涉及臂在水平方向上动作的水平多关节机器人。
背景技术:
1、以往,已知有用于输送半导体晶片的水平多关节机器人(例如,参照专利文献1)。专利文献1所记载的水平多关节机器人被组装到半导体制造系统中使用。半导体制造系统具备efem(equipment front end module:设备前端模块),水平多关节机器人构成efem的一部分。efem具有收纳水平多关节机器人的壳体。
2、专利文献1所记载的水平多关节机器人具有:搭载半导体晶片的手部;臂,其在前端侧以能够转动的方式连结手部;以及主体部,其以能够转动的方式与臂的基端侧连结。臂具有基端侧可转动地连结在主体部上的第一臂部、基端侧可转动地连结在第一臂部的前端侧的第二臂部、基端侧可转动地连结在第二臂部的前端侧的第三臂部。在第三臂部的前端侧以能够转动的方式连结有手部。第一臂部配置在主体部的上侧,第二臂部配置在第一臂部的上侧,第三臂部配置在第二臂部的上侧,手部配置在第三臂部的上侧。
3、另外,专利文献1所记载的水平多关节机器人具备使臂升降的臂升降机构。臂升降机构具有:驱动机构,其具有滚珠丝杠和使滚珠丝杠的丝杠轴旋转的马达等;导向机构,其具有导轨和与导轨卡合的导向块等。臂升降机构收纳在主体部的内部,配置在第一臂部的下侧。即,构成臂升降机构的一部分的滚珠丝杠和导轨配置在第一臂部的下侧。
4、[现有技术文献]
5、[专利文献]
6、专利文献1:日本特开2015-36186号公报
技术实现思路
1、在专利文献1所记载的水平多关节机器人中,如果能够不改变臂下降到下限位置时的水平多关节机器人的高度而增加臂的升降量,则能够在各种半导体制造系统中使用水平多关节机器人,能够提高水平多关节机器人的通用性,因此,专利文献1所记载的水平多关节机器人优选这样构成。另外,在半导体制造系统中,优选设置在壳体中的水平多关节机器人在水平方向上为小型。
2、因此,本发明的课题在于提供一种水平多关节机器人,在臂沿水平方向动作的水平多关节机器人中,即使不改变臂下降到下限位置时的水平多关节机器人的高度而能够增加臂的升降量,也能够在水平方向上小型化。
3、为了解决上述课题,本发明的水平多关节机器人是臂沿水平方向动作的水平多关节机器人,其特征在于,包括:搭载输送对象物的手部;在前端侧能转动地连结手部的臂;能转动地连结臂的基端侧的主体部;以及使臂升降的臂升降机构,臂包括:基端侧能转动地连结于主体部的第一臂部;以及基端侧能转动地连结于第一臂部的前端侧的第二臂部,第一臂部的下表面侧与主体部的上表面侧连结,第二臂部的下表面侧与第一臂部的上表面侧连结,在第二臂部的前端侧以能够转动的方式连结有构成臂的一部分的第三臂部的基端侧或手部的基端侧,第一距离比第二距离短,其中,第一距离是作为第一臂部相对于主体部的转动中心的第一转动中心与作为第二臂部相对于第一臂部的转动中心的第二转动中心之间的水平方向的距离,第二距离是作为与第二臂部连结的第三臂部或手部相对于第二臂部的转动中心的第三转动中心与第二转动中心之间的水平方向的距离,在臂下降到下限位置时,臂升降机构的上端部配置在第一臂部的基端部的侧方。
4、在本发明的水平多关节机器人中,在臂下降到下限位置时,臂升降机构的上端部配置在第一臂部的基端部的侧方。因此,在本发明中,与臂升降机构的整体配置在第一臂部的下侧的情况相比,不改变臂下降到下限位置时的水平多关节机器人的高度,就能够提高臂升降机构的高度。因此,在本发明中,能够不改变臂下降到下限位置时的水平多关节机器人的高度而增加臂的升降量。
5、另外,在本发明中,第一臂部相对于主体部的转动中心即第一转动中心与第二臂部相对于第一臂部的转动中心即第二转动中心之间的水平方向的距离即第一距离,比与第二臂部连结的第三臂部或手部相对于第二臂部的转动中心即第三转动中心与第二转动中心之间的水平方向的距离即第二距离短,因此,能够缩短第一臂部的长度。
6、因此,在本发明中,即使在臂下降到下限位置时臂升降机构的上端部配置在第一臂部的基端部的侧方,也能够将臂升降机构的上端部配置在长度短的第一臂部的侧方,其结果是,能够使水平多关节机器人在水平方向上小型化。即,在本发明中,即使不改变臂下降到下限位置时的水平多关节机器人的高度而能够增加臂的升降量,也能够在水平方向上使水平多关节机器人小型化。
7、在本发明中,例如,臂升降机构包括用于使臂升降的滚珠丝杠和用于沿上下方向引导臂的导轨,滚珠丝杠的丝杠轴配置成丝杠轴的轴向与上下方向一致,导轨配置成导轨的长度方向与上下方向一致,当臂下降到下限位置时,丝杠轴和导轨的上端部配置在第一臂部的基端部的侧方。
8、在本发明中,优选在臂下降到下限位置时,臂升降机构的上端配置在比第二臂部的下端靠下侧的位置。若这样构成,则即使在第二臂部上未形成用于防止第二臂部与臂升降机构的干涉的切口部等,也能够防止第二臂部转动时的第二臂部与臂升降机构的干涉。
9、在本发明中,例如,若将第一臂部及第二臂部以相互重叠的状态相对于主体部配置在规定的基准位置时的第一臂部及第二臂部的长度方向设为臂部长度方向,将臂部长度方向的一侧设为第一方向侧,将第一方向侧的相反侧设为第二方向侧,则在第一臂部及第二臂部以相互重叠的状态相对于主体部配置在基准位置并且臂下降到下限位置时,第一臂部的基端部成为第一臂部的第一方向侧的端部,并配置在臂升降机构的上端部的第二方向侧,第二臂部的前端部成为第二臂部的第一方向侧的端部,并配置在臂升降机构的上侧。在该情况下,即使不改变臂下降到下限位置时的水平多关节机器人的高度而能够增加臂的升降量,也能够在臂部长度方向上使水平多关节机器人小型化。
10、在本发明中,优选的是,升降机构收纳在主体部的内部,在第一臂部和第二臂部相互重叠的状态下相对于主体部配置在基准位置时的第二臂部的第一方向侧端在臂部长度方向上配置在与主体部的第一方向侧端相同的位置。若这样构成,则即使不改变臂下降到下限位置时的水平多关节机器人的高度而能够增加臂的升降量,也能够在臂部长度方向上使水平多关节机器人进一步小型化。
11、在本发明中,例如,在第二臂部的前端侧能转动地连结有第三臂部的基端侧,在第三臂部的前端侧能转动地连结有手部的基端侧。
12、在本发明中,优选水平多关节机器人包括:第一臂部驱动机构,其使第一臂部相对于主体部转动;第二臂部驱动机构,其使第二臂部相对于第一臂部转动;第三臂部驱动机构,其使第三臂部相对于第二臂部转动;以及手部驱动机构,其使手部相对于第三臂部转动。若这样构成,则能够提高水平多关节机器人的动作的自由度。
13、如上所述,在本发明中,在臂沿水平方向动作的水平多关节机器人中,即使不改变臂下降到下限位置时的水平多关节机器人的高度而能够增加臂的升降量,也能够使水平多关节机器人在水平方向上小型化。
技术特征:
1.一种水平多关节机器人,该水平多关节机器人的臂沿水平方向动作,其特征在于,
2.根据权利要求1所述的水平多关节机器人,其特征在于,
3.根据权利要求1或2所述的水平多关节机器人,其特征在于,
4.根据权利要求1或2所述的水平多关节机器人,其特征在于,
5.根据权利要求4所述的水平多关节机器人,其特征在于,
6.根据权利要求1或2所述的水平多关节机器人,其特征在于,
7.根据权利要求6所述的水平多关节机器人,其特征在于,
技术总结
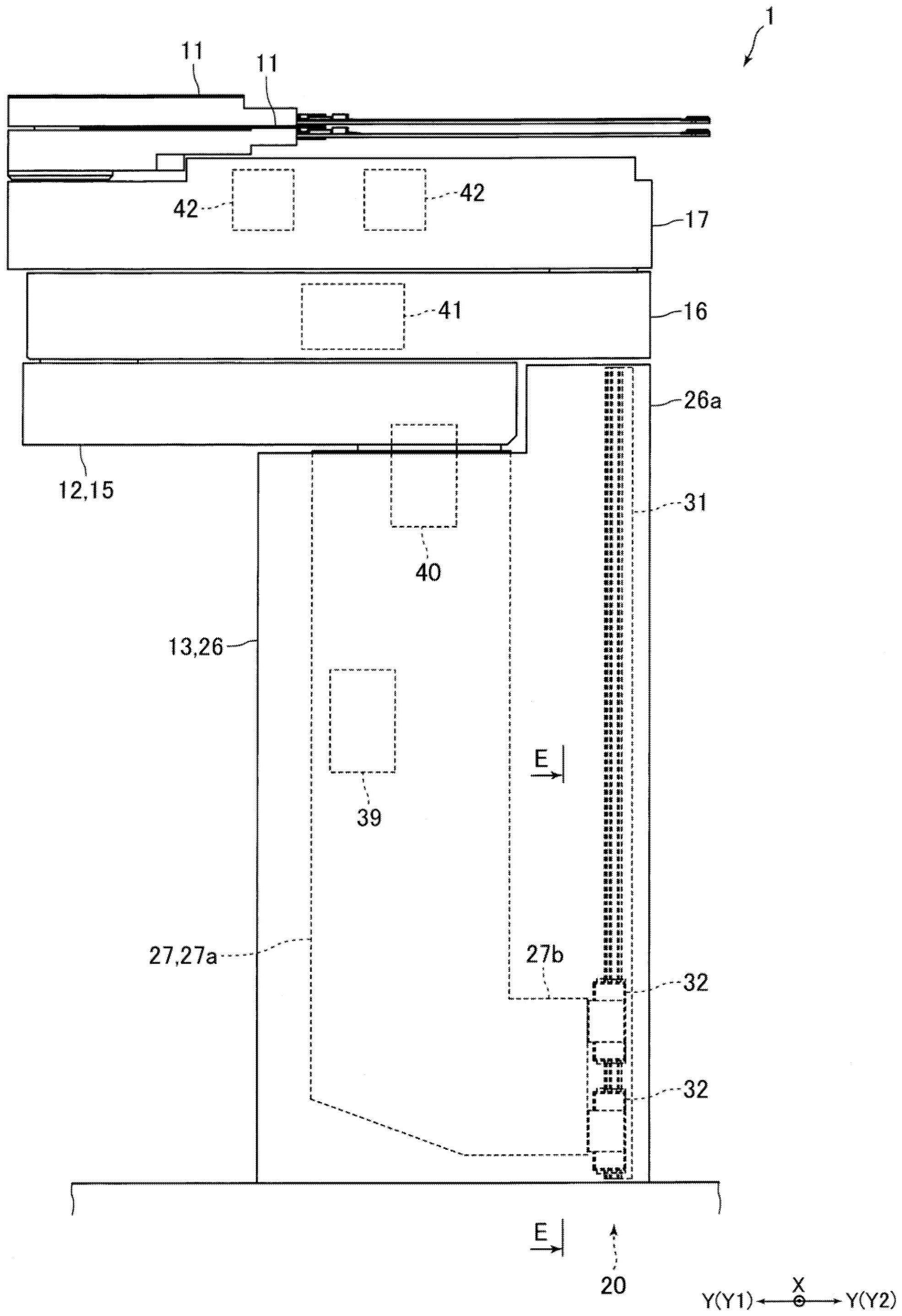
本发明提供一种水平多关节机器人,即使不改变臂下降到下限位置时的水平多关节机器人的高度而能够增加臂的升降量,也能够在水平方向上小型化。在水平多关节机器人(1)中,作为第一臂部(15)相对于主体部(13)的转动中心的第一转动中心与作为第二臂部(16)相对于第一臂部(15)的转动中心的第二转动中心之间的水平方向的距离即第一距离,比作为第三臂部(17)相对于第二臂部(16)的转动中心的第三转动中心与第二转动中心之间的水平方向的距离即第二距离短。另外,在水平多关节机器人(1)中,在臂(12)下降到下限位置时,臂升降机构(20)的上端部配置在第一臂部(15)的基端部的侧方。
技术研发人员:栗林保
受保护的技术使用者:日本电产三协株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!