软体灵巧手、软体灵巧手组件以及软体灵巧手的制作方法
本发明涉及气动软体机器人,特别是一种软体灵巧手、软体灵巧手组件以及软体灵巧手的制作方法。
背景技术:
1、由于软体灵巧手的结构简单、价格成本较低,同时在抓取物体时表现出的高度的柔顺性和安全性从而逐步得到发展和应用,但是现有的灵巧手存在整体自由度较少控制单一,阻碍了抓取的可靠性,同时现有控制系统过于复杂化以及控制不精准、不及时等问题,对灵巧手的应用和发展带来了巨大挑战。
技术实现思路
1、有鉴于此,本发明的目的在于提供软体灵巧手、软体灵巧手组件以及软体灵巧手的制作方法,实现灵巧手代替人工,应用于复杂危险或者特殊情况下对物体的抓取操作。
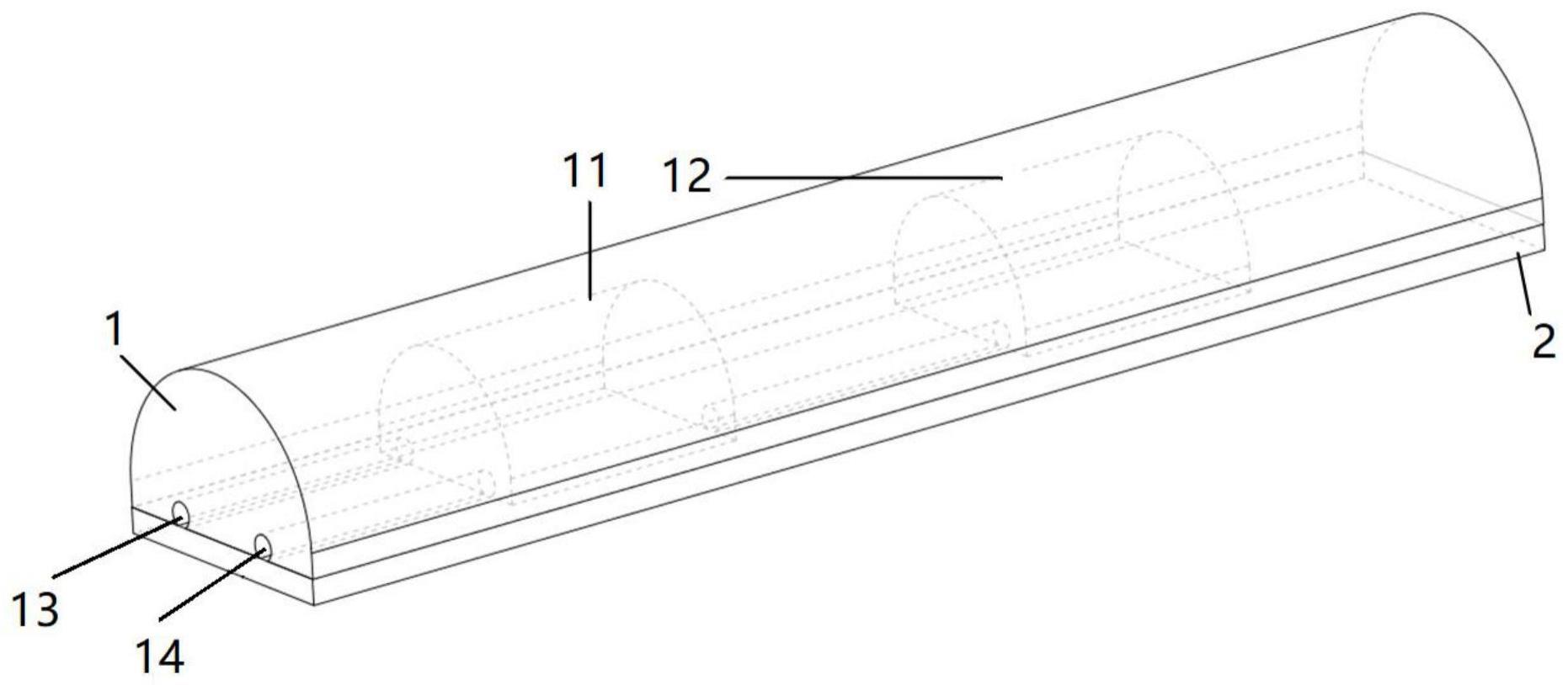
2、为实现上述目的,本发明采用如下技术方案:软体灵巧手,包括多个软体驱动器;所述软体驱动器包括内膜部分;所述内膜部分包括硅胶上层、硅胶下层以及轴向限制层;
3、所述硅胶上层与硅胶下层组成主体部分,所述主体部分依次设置为掌骨件、第一软体关节件、第一指骨件、第二软体关节件、第二指骨件;所述第一指骨件、第二指骨件以及掌骨件为实心结构;所述第一软体关节件以及第二软体关节件为空心结构,所述第一软体关节件及第二软体关节件的外部分别螺旋绕有缠绕线;所述硅胶上层设置有第一气管及第二气管;所述第一气管连通所述第一软体关节件,所述第二气管连通所述第二软体关节件;
4、在一较佳的实施例中,所述软体驱动器还包括外模部分;所述外模部分将内膜部分包裹。
5、在一较佳的实施例中,所述缠绕线具体为凯夫拉线。
6、在一较佳的实施例中,所述轴向限制层具体有玻璃纤维制成。
7、本发明还提供了一种软体灵巧手组件,采用了上述的软体灵巧手,还包括控制系统,所述控制系统包括气泵,所述气泵连通所述第一气管及第二气管,通过控制气体流速来控制第一软体关节件及第二软体关节件的弯曲程度;所述第一气管与第二气管相互独立;
8、所述控制系统还包括气压传感器、电气比例阀、三通电磁阀、驱动模块以及单片机;所述单片机连接所述气压传感器、电气比例阀、驱动模块以及气泵;所述三通电磁阀连接所述驱动模块和软体驱动器;所述气泵还连接所述三通电磁阀;所述电气比例阀连接所述三通电磁阀;
9、所述驱动模块控制所述三通电磁阀的开关;单片机控制所述气泵输出不同流速的气体至软体驱动器;所述气压传感器对软体驱动器的压强实时监测并发送监测信号至所述单片机;所述单片机发送比例信号至所述电气比例阀,从而控制输入三通电磁阀的气体流速。
10、在一较佳的实施例中,还包括舵机,所述舵机设置于其中一个软体驱动器上,所述舵机连接所述单片机,所述单片机控制所述舵机旋转的角度。
11、本发明还提供了一种软体灵巧手的制作方法,制作了上述的软体灵巧手;包括以下步骤:
12、步骤1:采用0度硅胶,将固化液与液态液按照1:1充分搅拌混合,将搅拌好的硅胶放入真空除泡机中去除气泡,将除去气泡后的液体缓慢倒入硅胶上层模具与硅胶下层模具中,硅胶上层模具预留有第一气管的管道及第二气管的管道;同时在硅胶下层模具中放置不可拉伸的玻璃纤维充当轴向限制层制作下层;将带有硅胶材料的硅胶上层模具与硅胶下层模具放入烘干箱中,在50℃的条件下静置1h烘干;
13、步骤2:脱模后,在硅胶上层模具预留的第一气管的管道空间及第二气管的管道空间中,放入硅胶软管,并且在硅胶下层面涂一层硅胶粘合液,将硅胶上层与硅胶下层粘合;
14、步骤3:使用不可拉伸的凯夫拉线按照内模螺旋线位置进行双向对称缠线,防止驱动器在关节部分发生扭转;
15、步骤4:将硅胶上层模具与硅胶下层模具组成整体放入外膜模具中,同样在50℃的条件下静置1h烘干。
16、与现有技术相比,本发明具有以下有益效果:软体灵巧手拥有广阔的发展前景,控制方法简单、精度高、操作抓取更加灵活方便,可将灵巧手代替人工,应用于复杂危险或者特殊情况下对物体的抓取操作。
技术特征:
1.软体灵巧手,其特征在于包括多个软体驱动器;所述软体驱动器包括内膜部分;所述内膜部分包括硅胶上层、硅胶下层以及轴向限制层;
2.根据权利要求1所述的软体灵巧手,其特征在于,所述软体驱动器还包括外模部分;所述外模部分将内膜部分包裹。
3.根据权利要求1所述的软体灵巧手,其特征在于,所述缠绕线具体为凯夫拉线。
4.根据权利要求1所述的软体灵巧手,其特征在于,所述轴向限制层具体有玻璃纤维制成。
5.软体灵巧手组件,其特征在于采用了上述权利要求1至4中任意一项所述的软体灵巧手,还包括控制系统,所述控制系统包括气泵,所述气泵连通所述第一气管及第二气管,通过控制气体流速来控制第一软体关节件及第二软体关节件的弯曲程度;所述第一气管与第二气管相互独立;
6.根据权利要求1所述的软体灵巧手组件,其特征在于,还包括舵机,所述舵机设置于其中一个软体驱动器上,所述舵机连接所述单片机,所述单片机控制所述舵机旋转的角度。
7.软体灵巧手的制作方法,其特征在于,制作了上述权利要求1至4中任意一项所述的软体灵巧手;包括以下步骤:
技术总结
本发明提供了软体灵巧手、软体灵巧手组件以及软体灵巧手的制作方法,包括多个软体驱动器;所述软体驱动器包括内膜部分;所述内膜部分包括硅胶上层、硅胶下层以及轴向限制层;依次设置有掌骨件、第一软体关节件、第一指骨件、第二软体关节件、第二指骨件;所述第一指骨件、第二指骨件以及掌骨件为实心结构;所述第一软体关节件以及第二软体关节件为空心结构,所述第一软体关节件及第二软体关节件的外部分别螺旋绕有缠绕线;所述硅胶上层设置有第一气管及第二气管;所述第一气管连通所述第一软体关节件,所述第二气管连通所述第二软体关节件;应用本技术方案可实现灵巧手代替人工,应用于复杂危险或者特殊情况下对物体的抓取操作。
技术研发人员:蔡英杰,汪俊杰,苏永生,陈晓辉
受保护的技术使用者:福州大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!