一种机械零件抓取机械手臂
本发明涉及机械设备,具体涉及一种机械零件抓取机械手臂。
背景技术:
1、机械零件是构成机械的基本元件,是组成机械和机器的不可分拆的单个制件,机械零件的生产以及安装均需要经过多个工序,通过机械手臂对零件进行抓取,减轻工人的劳动强度,现有的机械手臂对机械爪的定位已经非常准确了,但是,由于机械零件的形状不同,现有的机械爪在抓取时,不能完全紧密贴合于零件,导致夹取零件时,抓取力不足,抓取不牢固,且现有的机械爪是固定在机械臂上的,当夹取的物体不同时,需要更换机械手臂整体方可使用。
技术实现思路
1、本发明的目的在于针对现有技术的缺陷和不足,提供一种结构简单,设计合理、使用方便的机械零件抓取机械手臂,能够使夹取爪进行夹紧操作,且夹取爪能够进行拆卸操作,便于根据机械零件的需求,更换相对应的夹取爪。
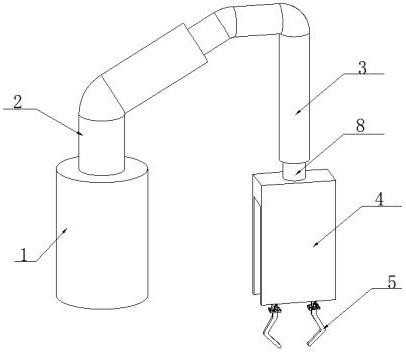
2、为实现上述目的,本发明采用的技术方案是:它包含固定臂座、调节臂和支撑臂,固定臂座的上侧设置有调节臂,调节臂的右侧设置有支撑臂;
3、它还包含:
4、夹取架,所得夹取架为倒“u”形结构设置,且夹取架设置于支撑臂的底部;
5、夹取爪,所述的夹取爪为两个,左右相对设置于夹取架的下侧;
6、夹取组件,所述的夹取组件设置于夹取架的内部;
7、安装组件,所述的安装组件为两组,分别设置于对应的夹取爪的上侧;
8、夹取爪通过安装组件进行安装操作,方便对夹取爪进行更换操作,以满足不同情况下的需求,通过夹取组件带动夹取爪进行抓取操作。
9、作为本发明的进一步改进,所述的夹取组件包含:
10、电动推杆,所述的电动推杆固定于夹取架的内顶面上,电动推杆与外部电源相连;
11、套筒,所述的套筒套设并固定于电动推杆的底部推动端上;
12、连接座,所述的连接座为两个,且连接座为倒“l”形结构设置,分别相对称固定于套筒的左右两侧;连接座中的垂直端底部开设有连接槽;
13、上驱动件,所述的上驱动件为两个,分别通过铰接轴铰接设置于对应的连接槽内;且上驱动件的下侧开设有插槽;
14、下驱动件,所述的下驱动件为两个,分别插设于对应的插槽内,并通过铰接轴铰接设置;
15、支撑轴,所述的支撑轴为两个,分别穿设并固定于下驱动件的内部,且支撑轴的前后两端分别通过轴承旋接设置于夹取架的前后两侧内壁内;
16、通过上述技术方案设计,电动推杆推动使上驱动件和下驱动件进行改变,下驱动件围绕其内部支撑轴的旋接点进行转动,改变下驱动件的角度,达到夹取的目的。
17、作为本发明的进一步改进,所述的安装组件包含:
18、上安装卡,所述的上安装卡套设并固定于下驱动件的底端,上安装卡的下表面与下驱动件的下表面齐平设置;且上安装卡的前后两侧均开设有卡槽,卡槽左右两侧的上安装卡内均开设有安装槽;安装槽左右两侧的上安装卡内均开设有定位孔;
19、下安装卡,所述的下安装卡套设并固定于夹取爪的上侧,下安装卡的上表面与夹取爪的上表面齐平设置;且下安装卡与上安装卡相接触设置;
20、安装凸起,所述的安装凸起为四个,呈矩阵式分布固定于下安装卡上;且安装凸起卡设于对应的安装槽内;且安装凸起内开设有通孔,通孔与定位孔贯通设置;
21、夹架,所述的夹架为两个,相对设置于下驱动件的前后两侧,且夹架设置于卡槽内,夹架中的左右两侧的插设端分别穿设于对应的定位孔以及通孔内;
22、卡座,所述的卡座为两个,相对固定于下驱动件的前后两侧,且卡座设置于夹架的上侧;
23、卡撑架,所述的卡撑架为两个,分别设置于下驱动件的前后两侧,卡撑架中的上插设端插设于卡座内,卡撑架中的下插设端与下驱动件相接触设置,且夹架的上端挂设于卡撑架中的下插设端上;
24、通过上述技术方案设计,将夹取爪与下驱动件进行安装。
25、作为本发明的进一步改进,所述的下驱动件的前后两侧均固定有支杆,且支杆设置于卡座的下侧,卡撑架中的垂直端套设于支杆内,支杆露设于卡撑架前侧的一端上设置有螺纹,锁紧套通过螺纹旋接设置于支杆的前端;
26、支杆对卡撑架进行导向,且通过锁紧套进行锁紧操作。
27、作为本发明的进一步改进,所述的夹取爪的上侧固定有定位凸台,下驱动件的底部开设有与定位凸台相对应的定位凹槽,定位凸台插设于该定位凹槽内;
28、通过上述技术方案设计,定位凸台对夹取爪的安装起到定位的作用。
29、作为本发明的进一步改进,所述的夹取架的上侧固定有支撑柱,支撑柱固定于支撑臂的底部;
30、通过支撑柱将夹取架与支撑臂进行连接。
31、本发明的工作原理:将夹取架安装于支撑臂的下侧,通过调节臂对夹取架内部的夹取爪进行调节,改变夹取爪的位置;根据零件的规格不同,更换相对应的不同规格的夹取爪,使夹取爪将零件夹取的更加稳固,手动将锁紧套拧下,以便将卡撑架向外拔出,向内挤压夹架中的左右两侧的垂直端,使夹架的两侧的插设端脱离安装凸起、上安装卡,对夹取爪进行更换,更换之后,再将夹架进行安装插进安装凸起以及上安装夹内,并通过卡撑架对夹架的上端进行支撑,最后,通过锁紧套进行锁紧操作;通过电动推杆的驱动,使连接座进行移动,带动上驱动件移动,且通过与下驱动件的铰接设置,驱动下驱动件围绕支撑轴的旋接点进行转动,使夹取爪进行夹取操作。
32、采用上述结构后,本发明有益效果为:
33、1、夹取爪能够根据需求进行安装与拆卸,方便安装不同规格的夹取爪,提高夹取爪的夹取效果;
34、2、通过同步驱动,使两侧的夹取爪同步移动,实现夹取的同时,还提高夹取爪的夹紧力度。
技术特征:
1.一种机械零件抓取机械手臂,它包含固定臂座(1)、调节臂(2)和支撑臂(3),固定臂座(1)的上侧设置有调节臂(2),调节臂(2)的右侧设置有支撑臂(3);
2.根据权利要求1所述的一种机械零件抓取机械手臂,其特征在于:所述的夹取组件(6)包含:
3.根据权利要求1所述的一种机械零件抓取机械手臂,其特征在于:所述的安装组件(7)包含:
4.根据权利要求3所述的一种机械零件抓取机械手臂,其特征在于:所述的下驱动件(6-5)的前后两侧均固定有支杆(7-7),且支杆(7-7)设置于卡座(7-5)的下侧,卡撑架(7-6)中的垂直端套设于支杆(7-7)内,支杆(7-7)露设于卡撑架(7-6)前侧的一端上设置有螺纹,锁紧套(7-8)通过螺纹旋接设置于支杆(7-7)的前端。
5.根据权利要求2所述的一种机械零件抓取机械手臂,其特征在于:所述的夹取爪(5)的上侧固定有定位凸台(7-9),下驱动件(6-5)的底部开设有与定位凸台(7-9)相对应的定位凹槽,定位凸台(7-9)插设于该定位凹槽内。
6.根据权利要求1所述的一种机械零件抓取机械手臂,其特征在于:所述的夹取架(4)的上侧固定有支撑柱(8),支撑柱(8)固定于支撑臂(3)的底部。
技术总结
一种机械零件抓取机械手臂,本发明涉及机械设备技术领域;夹取架为倒“U”形结构设置,且夹取架设置于支撑臂的底部;夹取爪为两个,左右相对设置于夹取架的下侧;夹取组件设置于夹取架的内部;安装组件为两组,分别设置于对应的夹取爪的上侧;能够使夹取爪进行夹紧操作,且夹取爪能够进行拆卸操作,便于根据机械零件的需求,更换相对应的夹取爪。
技术研发人员:刘彦伯
受保护的技术使用者:陕西国防工业职业技术学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!