一种腿部助力外骨骼的制作方法
本发明涉及腿部助力外骨骼领域,具体涉及一种腿部无力/残疾/无腿状态下通过手臂提供动力行走的装置。
背景技术:
1、目前在外面市场上的腿部助力机构基本都是给健康人群提供的外骨骼助力器,而残障人士独立行走的腿部机械助力外骨骼基本没有,该发明通过自身手臂驱动使特殊人群能够达到自行行走目的的设备。
技术实现思路
1、本发明的目的在于提供一种残障人士的腿部机械助力外骨骼,解决了现有残障人士需要家人或医护陪同通过轮椅行走的现状。
2、本发明的目的可以通过以下技术方案实现:
3、一种腿部外骨骼辅助器,包括拥有腿部助力外骨骼,所述腿部机械助力外骨骼通过手臂提供给腿部动力,可通过手臂摆动频率和摆动幅度调节速度,方便快捷达到最快捷的自动行走效果,通过手臂和身体可控制人体前进和方向,腿部助力外骨骼简单易操作;
4、作为本发明的进一步方案,所述如单腿/双腿残疾无力人士本装置可通过连接设备安装于单腿上工作或安装双腿侧工作,通过手臂牵引方向和幅度控制,让失去行走能力用户实现真正意义上的独立行走,给用户提供人生二次独立行走机会。
5、作为本发明的进一步方案,所述腰腿衔接支撑骨架9为u型支撑件,站立式保证支撑稳定,行进时可左右摆动,同步保证支撑性能。
6、作为本发明的进一步方案,手臂牵引绑带、腰部背带骨架和腿部外骨架不使用魔术贴的情况下均可通过刚性连接固定,通过内部充气缓冲垫增加舒适型,起到既有支撑又有舒适型的效果。
7、作为本发明的进一步方案,如图3所示,腿部支撑杆也可使用电机控制,可控制电机速度和支撑位置,让人体时处于行走和稳定站立位置,做到让人靠电源提供动力行走爬楼梯和坐下。
8、作为本发明的进一步方案,电动机通过摇摆杆处于高度可调节状态,通过调节高度来控制人体行走的迈步幅度,背带仅作为固定使用。
9、作为本发明的进一步方案,所述腰部固定支架腿部上侧部分为可左右摆动状态,通过摆动来控制腿部的左右转动控制行进方向。
10、本发明的有益效果:
11、通过直接拿取穿戴好该助力外骨骼,即可进行直立行走和爬楼梯,使用便捷快速,并可通过手臂摆动频率和幅度控制行走距离和速度。
技术特征:
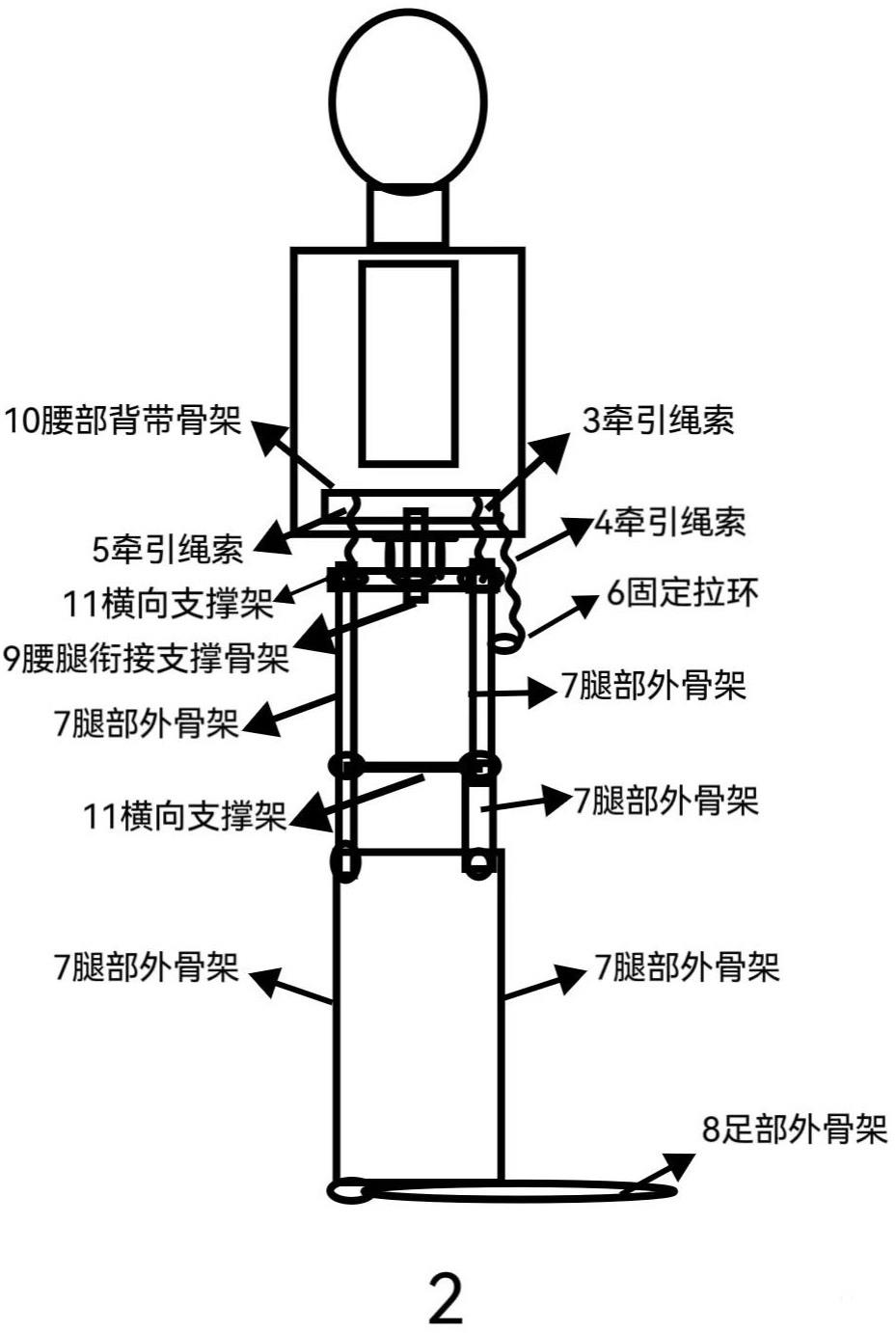
1.一种腿部助力外骨骼,其特征在于:包括腿部机械助力外骨骼,所述腿部机械助力外骨骼的上面有牵引背带(1),牵引背带(1)上牵引绳索(3)(4)(5)和腰部背带骨架(10)连接,通过内部牵引绳索(3)(4)(5)连接手臂牵引绑带(2)和横向支撑架(11)还有腿部外骨架(7)上的腿部固定拉环(6);腿部外骨架(7)、足部外骨架(8)和腰部背带骨架(10)均通过魔术固定贴进行身体部位固定。
2.根据权利要求1所述的一种腿部外骨骼辅助器,其使用后特征在于:所述腿部外骨架(7)可通过牵引绳索(3)(4)(5)经手臂牵引绑带(2)提供动力受力进行拉伸,人体手臂进行动力输出。
3.根据权利要求1或2所述的一种腿部外骨骼辅助器,其特征在于:所述外骨骼包括手臂牵引绑带(2)、牵引背带(1)、腰部背带骨架(10)、腿部外骨架(7)和足部外骨架(8)将上中下三部分内部一体连接。
4.根据权利要求1所述的一种腿部外骨骼辅助器,其特征在于:所述无外力引入通过手臂牵引绑带(2)提供动力使腿部外骨骼(7)进行受力弯曲和前进。
5.根据权利要求1所述的一种腿部外骨骼辅助器,其特征在于:所述腿部支撑由固定拉环(6)、腿部支撑骨架(7)、足部外骨架(8)、腰腿衔接支撑骨架(9)、腰部背带骨架(10)和横向支撑架(11),腿部通过可旋转螺栓连接固定,腰和腿连接处固定螺栓连接。
6.根据权利要求1、2或3所述的一种腿部外骨骼辅助器,其特征在于:所上部腰部背带骨架(10)、腿部外骨骼(7)、牵引背带(1)和手臂牵引绑带(2)均由魔术固定贴固定与身体上,固定力度呈可调节状态,三部分均呈可分离设置。
7.根据权利要求1所述的一种腿部外骨骼辅助器,其特征在于,该腿部助力外骨骼具体使用步骤如下:步骤一:用户穿戴好外骨骼,手臂牵引绑带(2)向左右打开,通过牵引绳索(4)可将腿部外骨骼(7)大腿抬起;步骤二:接着通过手臂牵引绑带(2)向后摆动,通过牵引绳索(5)可将腿部外骨骼(7)小腿弯曲抬起;步骤三:再接着通过手臂牵引绑带(2)向前摆动,通过牵引绳索(3)可将腿部外骨骼(7)小腿向前抬起伸直,达到向前一步的行走,行进时往复前面动作;步骤四:当手臂收缩垂直时,身体稳定站立于地面。
技术总结
本发明公开了一种腿部助力外骨骼,包括可调节背带外骨骼,外骨骼分为腰部固定支架、牵引背带、腿部支撑骨架三个区域,外骨骼的骨架支撑背面均有魔术贴束缚带固定,双层保护人体安全,外骨骼的固定支架和大腿、大腿和小腿连接处均有弹力组件作为支撑件;本发明具备在无外力驱动下让原本无力和微力的残障人士行走的能力,操作简便,让残障人士远离轮椅。
技术研发人员:张才
受保护的技术使用者:张才
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!