基于负压电机混动的高精度运动平台
本发明涉及机械设备,具体地,涉及一种基于负压电机混动的高精度运动平台。
背景技术:
1、随着科技的进步,自动化生产设备越来越受到青睐,在众多自动化生产设备中,经常会借助运动平台来实现各种功能,例如直线运动平台,通过电机或者气缸驱动实现直线运动,采用电机驱动时,通常是用电机带动丝杠将旋转运动转换为直线运动。例如在激光切割装置、激光打标装置中,通过直线运动平台将待加工工件运送至预定位置,然后对工件进行加工。
2、然而传统运动平台要实现高精度的驱动往往比较困难,要不精度不够,工件加工精度往往无法得到保证,要不结构复杂,具有成本高、精度低、易受振动干扰、使用不方便的缺陷。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于负压电机混动的高精度运动平台。
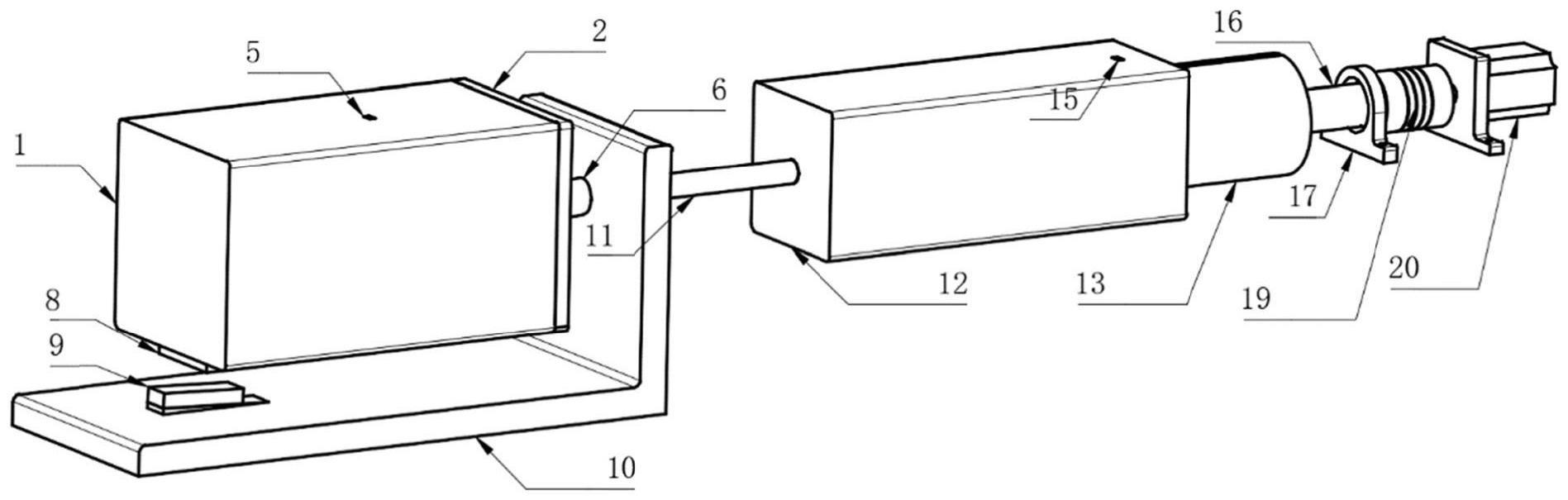
2、根据本发明提供的一种基于负压电机混动的高精度运动平台,包括动力机构、被动腔套筒、被动腔活塞、被动腔支座、主动腔套筒、主动腔活塞以及主动腔驱动丝杆;
3、所述主动腔活塞的一端可滑动的布置在所述主动腔套筒的内部并与所述主动腔套筒之间形成第一密闭空间,所述被动腔活塞的一端可滑动的布置在所述被动腔套筒的内部并与所述被动腔套筒之间形成第二密闭空间,所述第一密闭空间与第二密闭空间的内部均填充有流体并通过流体导管连通,其中,所述被动腔支座、主动腔套筒均被固定,所述被动腔套筒与所述被动腔支座之间设置有运动副使得所述被动腔套筒在外力的驱使下能够相对于所述被动腔支座运动;
4、当所述动力机构运行时能够驱使所述主动腔驱动丝杆转动进而能够驱使所述主动腔活塞向左或向右运动从而使得所述第一密闭空间中的流体流入第二密闭空间中或第二密闭空间中的流体流入第一密闭空间中进而驱使所述被动腔套筒远离或靠近所述被动腔活塞运动,其中,所述被动腔套筒的内径大于所述主动腔套筒的内径。
5、优选地,所述被动腔活塞的另一端通过被动腔连接螺杆连接被动腔支座,所述被动腔活塞、被动腔连接螺杆均为中空结构,所述第一密闭空间依次通过流体导管、被动腔连接螺杆、被动腔活塞连通所述第二密闭空间。
6、优选地,所述被动腔连接螺杆上套装有被动腔端盖且所述被动腔端盖能够相对于被动腔连接螺杆滑动,所述被动腔端盖与被动腔套筒的端部紧固连接,所述被动腔端盖和被动腔活塞之间配置有弹性体。
7、优选地,所述弹性体为机械式弹簧或磁力弹簧。
8、优选地,所述被动腔活塞与所述被动腔套筒之间、所述主动腔活塞与主动腔套筒之间均具有导向结构。
9、优选地,所述导向结构能够防止被动腔活塞和/或主动腔活塞转动。
10、优选地,所述主动腔驱动丝杆与所述主动腔活塞螺纹驱动,其中,主动腔活塞内部的螺纹孔为盲孔。
11、优选地,所述流体导管为柔性结构或刚性结构。
12、优选地,所述运动副为接触式运动副或非接触的磁力运动副。
13、优选地,所述被动腔活塞与所述被动腔套筒之间、所述主动腔活塞与主动腔套筒之间均具有密封结构。
14、与现有技术相比,本发明具有如下的有益效果:
15、1、本发明被动腔套筒直径大于主动腔套筒直径,使得被动腔位移与主动腔位移之比为套筒截面积的反比,使用精度较低的丝杆模组也能获得更高精度的输出和更大的输出力。
16、2、本发明在驱动过程中由于负压力和弹簧弹力,使丝杆模组间隙相对稳定,提高了驱动精度。
17、3、本发明使用液体作为传递介质,噪声低,降低内部振动,提高精度。
18、4、本发明在活塞上开有导向槽,防止活塞转动,底部使用自补偿的磁力支撑,整体结构无需导轨,减少微小颗粒的产生,提高环境洁净度。
19、5、本发明采用柔性的流体导管传递流体,使得被动腔和主动腔可以在空间中不同位置布置,通用性好。
技术特征:
1.一种基于负压电机混动的高精度运动平台,其特征在于,包括动力机构、被动腔套筒(1)、被动腔活塞(3)、被动腔支座(10)、主动腔套筒(12)、主动腔活塞(13)以及主动腔驱动丝杆(16);
2.根据权利要求1所述的基于负压电机混动的高精度运动平台,其特征在于,所述被动腔活塞(3)的另一端通过被动腔连接螺杆(6)连接被动腔支座(10),所述被动腔活塞(3)、被动腔连接螺杆(6)均为中空结构,所述第一密闭空间(31)依次通过流体导管(11)、被动腔连接螺杆(6)、被动腔活塞(3)连通所述第二密闭空间(32)。
3.根据权利要求2所述的基于负压电机混动的高精度运动平台,其特征在于,所述被动腔连接螺杆(6)上套装有被动腔端盖(2)且所述被动腔端盖(2)能够相对于被动腔连接螺杆(6)滑动,所述被动腔端盖(2)与被动腔套筒(1)的端部紧固连接,所述被动腔端盖(2)和被动腔活塞(3)之间配置有弹性体。
4.根据权利要求3所述的基于负压电机混动的高精度运动平台,其特征在于,所述弹性体为机械式弹簧(7)或磁力弹簧。
5.根据权利要求1所述的基于负压电机混动的高精度运动平台,其特征在于,所述被动腔活塞(3)与所述被动腔套筒(1)之间、所述主动腔活塞(13)与主动腔套筒(12)之间均具有导向结构。
6.根据权利要求5所述的基于负压电机混动的高精度运动平台,其特征在于,所述导向结构能够防止被动腔活塞(3)和/或主动腔活塞(13)转动。
7.根据权利要求1所述的基于负压电机混动的高精度运动平台,其特征在于,所述主动腔驱动丝杆(16)与所述主动腔活塞(13)螺纹驱动,其中,主动腔活塞(13)内部的螺纹孔为盲孔。
8.根据权利要求1所述的基于负压电机混动的高精度运动平台,其特征在于,所述流体导管(11)为柔性结构或刚性结构。
9.根据权利要求1所述的基于负压电机混动的高精度运动平台,其特征在于,所述运动副为接触式运动副或非接触的磁力运动副。
10.根据权利要求1所述的基于负压电机混动的高精度运动平台,其特征在于,所述被动腔活塞(3)与所述被动腔套筒(1)之间、所述主动腔活塞(13)与主动腔套筒(12)之间均具有密封结构。
技术总结
本发明提供了一种基于负压电机混动的高精度运动平台,包括动力机构、被动腔套筒、被动腔活塞、被动腔支座、主动腔套筒、主动腔活塞以及主动腔驱动丝杆,主动腔活塞的一端可滑动的布置在主动腔套筒的内部并与主动腔套筒之间形成第一密闭空间,被动腔活塞的一端可滑动的布置在被动腔套筒的内部并与被动腔套筒之间形成第二密闭空间,第一密闭空间与第二密闭空间的内部均填充有流体并通过流体导管连通,被动腔套筒的内径大于主动腔套筒的内径。本发明被动腔套筒直径大于主动腔套筒直径,使得被动腔位移与主动腔位移之比为套筒截面积的反比,使用精度较低的丝杆模组也能获得更高精度的输出和更大的输出力。
技术研发人员:杨斌堂,曹树,张亚辉
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!