一种基于大数据的工业机器人控制系统及方法与流程
发明涉及工业机器人,尤其涉及一种基于大数据的工业机器人控制系统及方法。
背景技术:
1、工业机器人是由机械本体、控制器、伺服驱动系统和检测传感器装置构成的一种能仿人操作、可自动控制、重复编程、并能在三维空间完成各种作业任务的机电--体化设备。目前己广泛应用于汽车及汽车零部件制造、机械加工、电子电气制造、食品加工等许多领域,成为柔性制造系统(fms)、工厂自动化(fa)、计算机集成制造系统(cims)的先进自动化工具。
2、现代工业的快速发展迫切需要进一步提高生产效率、产品质量及产品更新换代的速度,因而工业机器人己进入高速、高精度、智能和模块化的发展阶段,尤其在高速高精度方面,己成为现代工业机器人发展的主要趋势,如应用于激光焊接、激光切割的工业机器人需要更高的跟踪精度。因此,实现工业机器人高速高精度的运动控制,具有重要意义。
3、但在现有技术中,在对工业机器人进行控制中存在效率低,反应速度慢的问题。
技术实现思路
1、本发明提供了一种基于大数据的工业机器人控制系统及方法及其控制方法,以解决现有的监测准确度较低的问题。
2、为了实现上述目的,本发明通过如下的技术方案来实现:
3、本发明提供一种基于大数据的工业机器人控制系统及方法,包括:
4、工业机器人设备数据采集组件,在产线工业机器人上设置工业机器人设备数据采集组件采集工业机器人不同状态下的设备数据,用于检测产品靠近工业机器人时的工业机器人设备数据,将所述工业机器人设备数据发送至工业机器人监测与决策组件中的云超级计算平台;
5、工业机器人监测与决策组件,所述工业机器人监测与决策组件包括云超级计算平台,所述云超级计算平台用于根据所述工业机器人设备数据确定所述工业机器人设备数据对应的产品与工业机器人之间的加工关系,并将所述加工关系发送至匹配的智慧显示屏;还用于接收来自所述工业机器人的设备状态数据,根据所述设备状态数据与所述工业机器人设备数据产生监控信号;
6、工业机器人自动控制组件,用于根据所述加工关系获取所述产品的设备状态数据,并将所述设备状态数据发送至工业机器人监测与决策组件。
7、可选地,还包括热传感设备组件,所述热传感设备与所述云超级计算平台连接,所述热传感设备用于获取所述待监测区域中的产品设备状态数据,所述产品设备状态数据对应的工业机器人区域为所述工业机器人设备数据在所述待监测区域中的盲区,或者,所述工业机器人区域为与所述工业机器人设备数据在所述待监测区域中的区域重叠的重叠区域。
8、可选地,所述工业机器人设备数据采集组件包括一个数据存储与调用组件,每一所述数据存储与调用组件包括一个数据传输接口,所述一个数据存储与调用组件的数据传输接口组合成小型数据库。
9、可选地,还包括工业机器人型号匹配组件,所述工业机器人型号匹配组件与所述云超级计算平台连接,所述工业机器人型号匹配组件用于获取工业机器人变化设备数据,并根据所述工业机器人变化设备数据确定平台的管控状态,将所述平台的管控状态发送至供电组件,所述云超级计算平台还用于根据所述平台的管控状态进行模式的改变。
10、可选地,还包括供电组件,所述供电组件与所述工业机器人设备数据采集组件连接,所述供电组件用于在预设时间内产生供电电压,并将所述供电电压发送至供电组件;所述工业机器人设备数据采集组件利用变压器对电压进行控制。
11、可选地,所述工业机器人监测与决策组件还包括设备数据极限值设定组件,所述设备数据极限值设定组件用于实现所述云超级计算平台与所述工业机器人设备数据采集组件、所述工业机器人自动控制组件之间的设备数据交换,还用于为所述云超级计算平台、所述工业机器人设备数据采集组件、以及所述工业机器人自动控制组件设备数据压缩。
12、第二方面,本申请还提供一种应用于上述基于智能算法的移动式控制方法,包括:
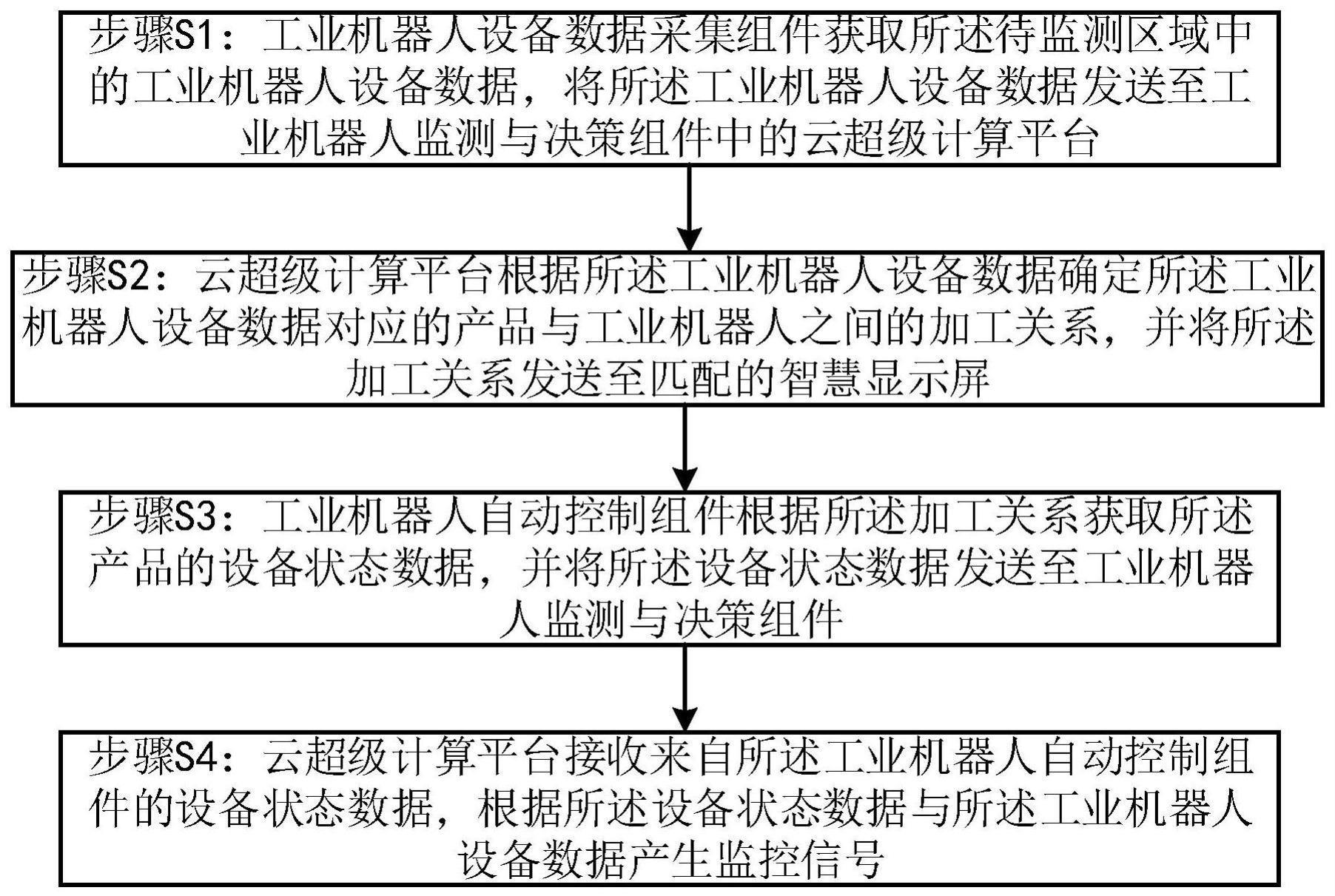
13、步骤s1:工业机器人设备数据采集组件获取所述待监测区域中的工业机器人设备数据,将所述工业机器人设备数据发送至工业机器人监测与决策组件中的云超级计算平台;
14、步骤s2:云超级计算平台根据所述工业机器人设备数据确定所述工业机器人设备数据对应的产品与工业机器人之间的加工关系,并将所述加工关系发送至匹配的智慧显示屏;
15、步骤s3:工业机器人自动控制组件根据所述加工关系获取所述产品的设备状态数据,并将所述设备状态数据发送至工业机器人监测与决策组件;
16、步骤s4:云超级计算平台接收来自所述工业机器人自动控制组件的设备状态数据,根据所述设备状态数据与所述工业机器人设备数据产生监控信号。
17、可选地,所述工业机器人设备数据包括运行信息、加工信息和启停信息。
18、可选地,上述控制方法还包括:
19、采用热传感设备获取所述待监测区域中的产品设备状态数据,所述产品设备状态数据对应的工业机器人区域为所述工业机器人设备数据在所述待监测区域中的盲区,或者,所述工业机器人区域为与所述工业机器人设备数据在所述待监测区域中的区域重叠的重叠区域。
20、有益效果:
21、本发明提供了一种基于大数据的工业机器人控制系统及方法,包括工业机器人设备数据采集组件,在产线工业机器人上设置工业机器人设备数据采集组件采集工业机器人不同状态下的设备数据,用于检测产品靠近工业机器人时的工业机器人设备数据,将工业机器人设备数据发送至工业机器人监测与决策组件中的云超级计算平台;工业机器人监测与决策组件,工业机器人监测与决策组件包括云超级计算平台,云超级计算平台用于根据工业机器人设备数据确定工业机器人设备数据对应的产品与工业机器人之间的加工关系,并将加工关系发送至匹配的智慧显示屏;还用于接收来自工业机器人的设备状态数据,根据设备状态数据与工业机器人设备数据产生监控信号;工业机器人,用于根据加工关系获取产品的设备状态数据,并将设备状态数据发送至云超级计算平台。这样,可以通过数据存储与调用组件实现对指定监控范围进行小型数据库全方位扫描,并检测和分析进入监控区域内的运动物体,将运动目标对应的工业机器人设备数据发送至云超级计算平台,进一步由云超级计算平台接收数据存储与调用组件采集实时信息并解析,计算出目标相对于工业机器人的方位角和距离,通过相应协议控制工业机器人转动定位到数据存储与调用组件发现的目标,同时调整热成像装置,使目标以合适大小出现在画面中,从而快速、准确的获取工业机器人区域的设备状态数据,此外,由于可以通过数据存储与调用组件实现对指定监控范围进行小型数据库全方位扫描,这样,还扩大了控制平台的监测范围。
技术特征:
1.一种基于大数据的工业机器人控制系统,其特征在于,该系统包括:
2.根据权利要求1所述的一种基于大数据的工业机器人控制系统,其特征在于,还包括热传感设备组件,所述热传感设备与所述云超级计算平台连接,所述热传感设备用于获取所述待监测区域中的产品设备状态数据,所述产品设备状态数据对应的工业机器人区域为所述工业机器人设备数据在所述待监测区域中的盲区,或者,所述工业机器人区域为与所述工业机器人设备数据在所述待监测区域中的区域重叠的重叠区域。
3.根据权利要求1所述的一种基于大数据的工业机器人控制系统,其特征在于,所述工业机器人设备数据采集组件包括一个数据存储与调用组件,每一所述数据存储与调用组件包括一个数据传输接口,所述一个数据存储与调用组件的数据传输接口组合成小型数据库。
4.根据权利要求1所述的一种基于大数据的工业机器人控制系统,其特征在于,还包括工业机器人型号匹配组件,所述工业机器人型号匹配组件与所述云超级计算平台连接,所述工业机器人型号匹配组件用于获取工业机器人变化设备数据,并根据所述工业机器人变化设备数据确定平台的管控状态,将所述平台的管控状态发送至供电组件,所述云超级计算平台还用于根据所述平台的管控状态进行模式的改变。
5.根据权利要求1所述的一种基于大数据的工业机器人控制系统,其特征在于,还包括供电组件,所述供电组件与所述工业机器人设备数据采集组件连接,所述供电组件用于在预设时间内产生供电电压,并将所述供电电压发送至供电组件;所述工业机器人设备数据采集组件利用变压器对电压进行控制。
6.根据权利要求1所述的一种基于大数据的工业机器人控制系统,其特征在于,所述工业机器人监测与决策组件还包括设备数据极限值设定组件,所述设备数据极限值设定组件用于实现所述云超级计算平台与所述工业机器人设备数据采集组件、所述工业机器人自动控制组件之间的设备数据交换,还用于为所述云超级计算平台、所述工业机器人设备数据采集组件、以及所述工业机器人自动控制组件设备数据压缩。
7.一种基于大数据的工业机器人控制方法,其特征在于,包括:
8.根据权利要求7所述的一种基于大数据的工业机器人控制方法,其特征在于,所述工业机器人设备数据包括运行信息、加工信息和启停信息。
9.根据权利要求7所述的一种基于大数据的工业机器人控制方法,其特征在于,还包括:采用热传感设备获取所述待监测区域中的产品设备状态数据,所述产品设备状态数据对应的工业机器人区域为所述工业机器人设备数据在所述待监测区域中的盲区,或者,所述工业机器人区域为与所述工业机器人设备数据在所述待监测区域中的区域重叠的重叠区域。
技术总结
本发明公开了一种基于大数据的工业机器人控制系统及方法,该基于智能算法的移动式的控制平台及方法包括工业机器人设备数据采集组件,在产线工业机器人上设置工业机器人设备数据采集组件采集工业机器人不同状态下的设备数据,用于检测产品靠近工业机器人时的工业机器人设备数据,将工业机器人设备数据发送至工业机器人监测与决策组件中的云超级计算平台;工业机器人监测与决策组件,工业机器人监测与决策组件包括云超级计算平台,云超级计算平台用于根据工业机器人设备数据确定工业机器人设备数据对应的产品与工业机器人之间的加工关系,并将加工关系发送至匹配的智慧显示屏;该发明可以解决现有的工业机器人控制问题。
技术研发人员:杨金杰,陈博,李锴
受保护的技术使用者:南通智客机器人自动化有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!