一种集成一体化微型多功能机械臂的制作方法
本发明涉及工业机械,具体讲是一种集成一体化微型多功能机械臂。
背景技术:
1、目前,随着工业机械的不断发展,很多设备都能实现自动化操作,很多产品都能通过自动化进行生产,而机械臂是工业机械设备中必不可少的,但是现有机械臂的功能都较为单一,一般一种机械臂只能实现一种功能;
2、现有的机械臂驱动夹持部件对物料进行夹持时,物料的重量会对装置产生联动力,从而影响装置整体的稳定性;而机械臂的底座常通过螺栓固定在其他装置上以进行固定,机械臂的转动角度会受到限制,无法满足不同方向的物料夹持,实用性较低。
技术实现思路
1、本发明的目的在于提供一种集成一体化微型多功能机械臂,以解决上述背景技术中提出的问题。
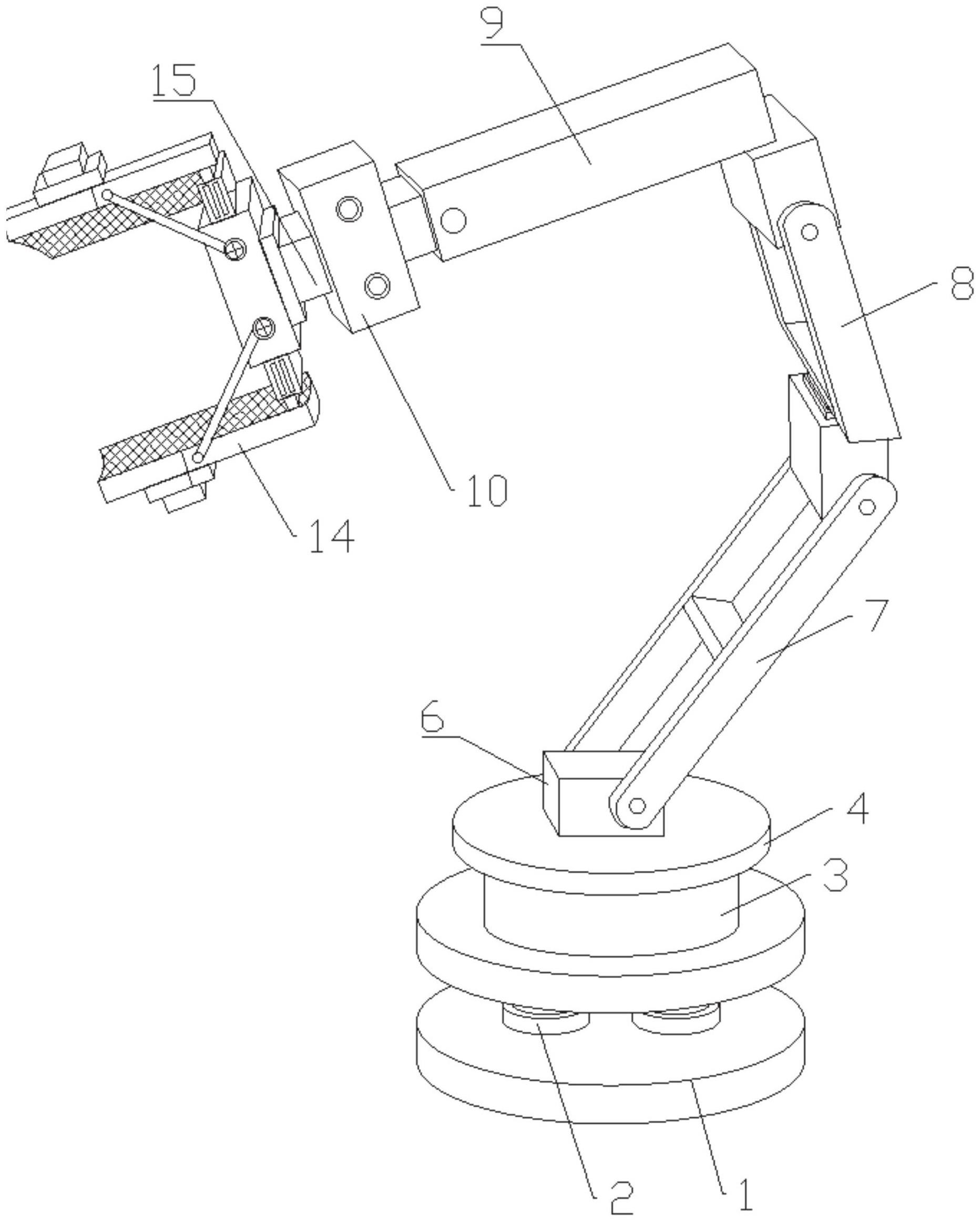
2、本发明的技术方案是:一种集成一体化微型多功能机械臂,包括防震底座,所述防震底座的上方固定安装有一组对称设置的电动推杆,两个所述电动推杆的上方固定安装有基座,所述基座的上方通过轴承安装有云台,所述基座内安装有伺服电机,所述伺服电机的输出端与云台的端部键固定连接;所述云台上固定安装有限位块,所述限位块上固定安装有主臂,所述主臂远离限位块的一端铰接有连接臂,所述连接臂远离主臂的一端铰接有摆臂,所述摆臂远离连接臂的一侧设有夹持部件。
3、进一步的,所述防震底座包括阻尼器、复位弹簧、横板和导向杆,所述横板的数量为两个,两个所述横板之间固定连接有若干复位弹簧,若干所述复位弹簧呈阵列设置,若十所述复位弹簧内均设有阻尼器,两个所述横板之间的边沿位置均设有若干导向杆。
4、进一步的,两个所述横板呈上下对称设置,其中位于上方的所述横板与两个电动推杆固定连接。
5、进一步的,所述夹持部件包括安装座和电动夹爪,所述安装座与摆臂转动连接,所述安装座远离摆臂的一端固定连接有卡块,所述电动夹爪的顶部开设有与卡块孔径相适配的卡槽。
6、进一步的,所述卡块与电动夹爪的两侧均贯穿开设有装配槽。
7、进一步的,所述主臂、连接臂和摆臂内均设有加强筋。
8、本发明通过改进在此提供一种集成一体化微型多功能机械臂,与现有技术相比,具有如下改进及优点:
9、其一:本发明的电动推杆可驱动基座向上调节工作高度,以使得装置能够适用于不同高度的物料夹持工作,伺服电机驱动云台转动,可多方位、便捷的调节转动方向,以使得上方的摆臂带动夹持部件能够进行任意方位转动,以提高装置的实用性。
10、其二:本发明通过设置防震底座,在电动夹爪夹持物料时,物料的重量会对整体装置产生联动力从而影响装置整体的稳定性,复位弹簧对产生的联动力进行减震和缓冲,从而提高装置的稳固效果。
技术特征:
1.一种集成一体化微型多功能机械臂,其特征在于:包括防震底座(1),所述防震底座(1)的上方固定安装有一组对称设置的电动推杆(2),两个所述电动推杆(2)的上方固定安装有基座(3),所述基座(3)的上方通过轴承安装有云台(4),所述基座(3)内安装有伺服电机(5),所述伺服电机(5)的输出端与云台(4)的端部键固定连接;所述云台(4)上固定安装有限位块(6),所述限位块(6)上固定安装有主臂(7),所述主臂(7)远离限位块(6)的一端铰接有连接臂(8),所述连接臂(8)远离主臂(7)的一端铰接有摆臂(9),所述摆臂(9)远离连接臂(8)的一侧设有夹持部件。
2.根据权利要求1所述的一种集成一体化微型多功能机械臂,其特征在于:所述防震底座(1)包括阻尼器、复位弹簧(11)、横板(12)和导向杆(13),所述横板(12)的数量为两个,两个所述横板(12)之间固定连接有若干复位弹簧(11),若干所述复位弹簧(11)呈阵列设置,若干所述复位弹簧(11)内均设有阻尼器,两个所述横板(12)之间的边沿位置均设有若干导向杆(13)。
3.根据权利要求2所述的一种集成一体化微型多功能机械臂,其特征在于:两个所述横板(12)呈上下对称设置,其中位于上方的所述横板(12)与两个电动推杆(2)固定连接。
4.根据权利要求1所述的一种集成一体化微型多功能机械臂,其特征在于:所述夹持部件包括安装座(10)和电动夹爪(14),所述安装座(10)与摆臂(9)转动连接,所述安装座(10)远离摆臂(9)的一端固定连接有卡块(15),所述电动夹爪(14)的顶部开设有与卡块(15)孔径相适配的卡槽(16)。
5.根据权利要求4所述的一种集成一体化微型多功能机械臂,其特征在于:所述卡块(15)与电动夹爪(14)的两侧均贯穿开设有装配槽(17)。
6.根据权利要求1所述的一种集成一体化微型多功能机械臂,其特征在于:所述主臂(7)、连接臂(8)和摆臂(9)内均设有加强筋。
技术总结
本发明涉及工业机械技术领域,具体讲是一种集成一体化微型多功能机械臂,包括防震底座,所述防震底座的上方固定安装有一组对称设置的电动推杆,两个所述电动推杆的上方固定安装有基座,所述基座的上方通过轴承安装有云台,所述云台上固定安装有限位块,所述限位块上固定安装有主臂,所述主臂远离限位块的一端铰接有连接臂,所述连接臂远离主臂的一端铰接有摆臂,所述摆臂远离连接臂的一侧设有夹持部件,本发明的电动推杆可驱动基座向上调节工作高度,以使得装置能够适用于不同高度的物料夹持工作,伺服电机驱动云台转动,可多方位、便捷的调节转动方向,以使得上方的摆臂对夹持部件能够进行任意方位转动,以提高装置的实用性。
技术研发人员:黄钊杰,年云峰,谢秋燕,宫将久,李淑惠
受保护的技术使用者:华深鹏建(深圳)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!