超声机器人扫描控制方法、装置、设备及存储介质
本申请涉及超声机器人,特别是涉及一种超声机器人扫描控制方法、装置、设备及存储介质。
背景技术:
1、目前,机器人普遍使用在工业生产、医疗、家庭教育、物流、娱乐等场景,人机协作随之成为机器人发展的关键性研究方向之一。而医学超声检查作为一种没有辐射,成本低廉的医学影像诊断技术,被普遍用于机器人辅助手术中,在手术过程中人机交互的稳定性,安全性至关重要。该发明方案提出一种自适应阻抗算法,能自适应的根据环境实时调整阻尼,并能实现恒定接触力的扫查行为,实时跟随人体的呼吸等起伏动作,还能在误触情况下降低阻尼,保护操作者和患者,减少安全隐患。
2、在机器人超声扫查的过程中,存在超声探头和人体的物理接触,需要实现机器人的交互控制。而在机器人交互控制领域,可以分为直接力控和间接力控,而间接力控包括柔顺控制和阻抗控制,柔顺控制方式有被动柔顺和主动柔顺,阻抗控制细分可分为阻抗控制和导纳控制。
3、其中阻抗控制是通过控制机器人的运动实现间接力控的一种方法,其最终的目标,既不是直接控制机器人的运动,也不是直接控制机器人与外界的接触力,而是控制二者之间的动态关系,
4、目前常见的阻纳控制方案,多数为固定参数,不能根据环境自适应调整参数进而改变刚度和阻尼,故在人机交互过程中,柔顺性和智能化程度低。
技术实现思路
1、有鉴于此,本申请提供一种超声机器人扫描控制方法、装置、设备及存储介质,以解决现有的超声机器人扫描时不能自适应改变刚度和阻尼的问题。
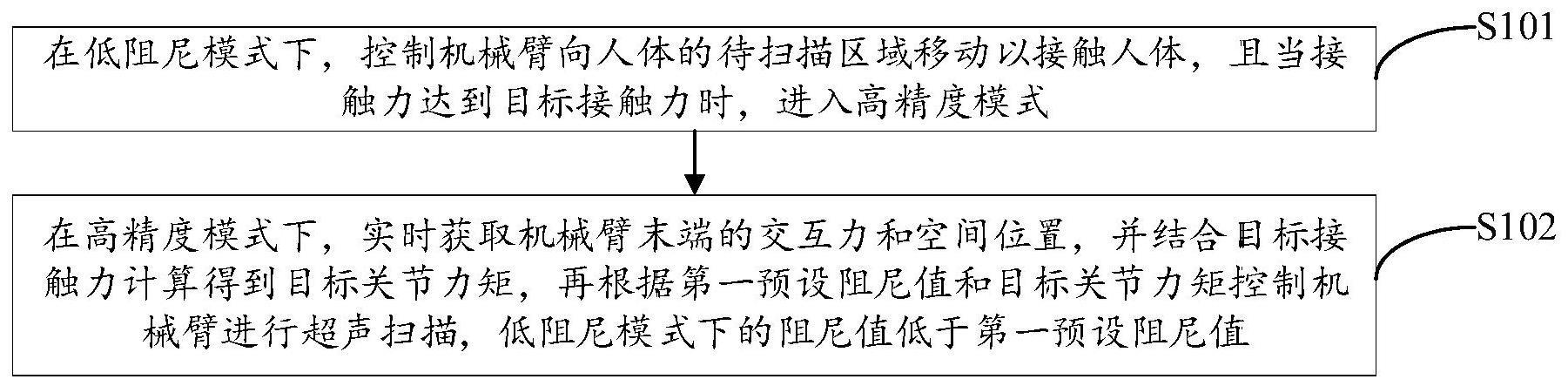
2、为解决上述技术问题,本申请采用的一个技术方案是:提供一种超声机器人扫描控制方法,其包括:在低阻尼模式下,控制机械臂向人体的待扫描区域移动以接触人体,且当接触力达到目标接触力时,进入高精度模式;在高精度模式下,实时获取机械臂末端的交互力和空间位置,并结合目标接触力计算得到目标关节力矩,再根据第一预设阻尼值和目标关节力矩控制机械臂进行超声扫描,低阻尼模式下的阻尼值低于第一预设阻尼值。
3、作为本申请的进一步改进,实时获取机械臂末端的交互力和空间位置,并结合目标接触力计算得到目标关节力矩,再根据第一预设阻尼值和目标关节力矩控制机械臂进行超声扫描,包括:实时获取机械臂末端的交互力、速度和空间位置,并结合目标接触力计算得到目标关节力矩,再根据第一预设阻尼值和目标关节力矩控制机械臂在指定轨迹下进行超声扫描。
4、作为本申请的进一步改进,目标关节力矩的计算公式表示为:
5、
6、
7、xe=xd-xa;
8、ffroce=kpsf(fa-fd)+ki∫sf(fa-fd)dt;
9、
10、
11、其中,τ表示目标关节力矩,fext为六维力传感器在工具坐标系下的环境应力在基础坐标系或者工件坐标系下的描述,xe是实际位姿xa与期望位姿xd的差值,是xe的二阶导数,是xe的一阶导数,k为刚度系数对角矩阵,b为阻尼系数对角矩阵,ffroce表示需要力控方向的分量,fa为实际接触力,fd为目标接触力,kp和ki分别为pi控制器的误差项参数和积分项参数,sf表示对角矩阵,,m(q)表示机器人惯性矩阵,表示科氏力和离心力,g(q)表示重力矩,jt(q)表示机器人雅各比矩阵的转置,表示关节空间加速度,表示关节空间速度,q表示关节空间坐标矢量,表示笛卡尔空间期望速度,表示笛卡尔空间期望加速度,j(q)表示机器人雅各比矩阵,表示机器人雅各比矩阵的倒数。
12、作为本申请的进一步改进,根据第一预设阻尼值和目标关节力矩控制机械臂在指定轨迹下进行超声扫描之后,还包括:判断机械臂末端的速度是否超过预设速度临界值;当速度超过预设速度临界值时,触发低阻尼模式,控制机械臂的阻尼值降低;当速度未超过预设速度临界值时,维持高精度模式。
13、作为本申请的进一步改进,在低阻尼模式下,机械臂的阻尼值根据初始阻抗系数、机械臂末端的速度和阻抗系数下降幅度计算得到,且机械臂的阻尼值介于第一预设阻尼值和第二预设阻尼值之间,第一预设阻尼值大于第二预设阻尼值;在高精度模式下,机械臂的阻尼值为第一预设阻尼值。
14、作为本申请的进一步改进,机械臂的阻尼值的计算公式表示为:
15、
16、其中,表示机械臂的阻尼值,表示笛卡尔空间速度,表示机械臂末端的速度,a表示初始阻抗系数,b表示阻抗系数下降幅度,c表示第二预设阻尼值,bmax表示第一预设阻尼值,其中a+c>bmax>c>0,且表示预设速度临界值。
17、作为本申请的进一步改进,根据第一预设阻尼值和目标关节力矩控制机械臂进行超声扫描之后,还包括:当机械臂完成超声扫描任务后,控制机械臂向远离人体的方向运动至目标位置,并维持机械臂处于高精度模式。
18、为解决上述技术问题,本申请采用的又一个技术方案是:提供一种超声机器人扫描控制装置,其包括:准备模块,用于在低阻尼模式下,控制机械臂向人体的待扫描区域移动以接触人体,且当接触力达到目标接触力时,进入高精度模式;扫描模块,用于在高精度模式下,实时获取机械臂末端的交互力和空间位置,并结合目标接触力计算得到目标关节力矩,再根据第一预设阻尼值和目标关节力矩控制机械臂进行超声扫描,低阻尼模式下的阻尼值低于第一预设阻尼值。
19、为解决上述技术问题,本申请采用的再一个技术方案是:提供一种计算机设备,所述计算机设备包括处理器、与所述处理器耦接的存储器,所述存储器中存储有程序指令,所述程序指令被所述处理器执行时,使得所述处理器执行如上述任一项的超声机器人扫描控制方法的步骤。
20、为解决上述技术问题,本申请采用的再一个技术方案是:提供一种存储介质,存储有能够实现上述任一项的超声机器人扫描控制方法的程序指令。
21、本申请的有益效果是:本申请的超声机器人扫描控制方法通过在控制超声机器人进行扫描之前,将超声机器人的机械臂切换至低阻尼模式下,以降低机械臂的阻尼值,使得机械臂的柔顺性更高,操作者可将机械臂进行低阻尼拖动,方便操作者将机械臂放置在人体的待扫描区域的正上方,再控制机械臂向人体的待扫描区域移动以接触人体,且当接触力达到目标接触力时,进入高精度模式,且在高精度模式下,机械臂的阻尼值升高,维持超声稳定成像,并且,根据机械臂末端的交互力和空间位置实时控制机械臂末端执行扫查任务,保证机械臂末端与人体之间有充分接触,并将机械臂末端与人体的接触力维持在指定的交互力范围,并可以根据人体呼吸幅度,自适应跟随人体表面的起伏动作,以保证超声成像效果好。
技术特征:
1.一种超声机器人扫描控制方法,其特征在于,其包括:
2.根据权利要求1所述的超声机器人扫描控制方法,其特征在于,所述实时获取机械臂末端的交互力和空间位置,并结合所述目标接触力计算得到目标关节力矩,再根据第一预设阻尼值和所述目标关节力矩控制所述机械臂进行超声扫描,包括:
3.根据权利要求2所述的超声机器人扫描控制方法,其特征在于,所述目标关节力矩的计算公式表示为:
4.根据权利要求2所述的超声机器人扫描控制方法,其特征在于,所述根据所述第一预设阻尼值和所述目标关节力矩控制所述机械臂在指定轨迹下进行超声扫描之后,还包括:
5.根据权利要求1所述的超声机器人扫描控制方法,其特征在于,在所述低阻尼模式下,所述机械臂的阻尼值根据初始阻抗系数、机械臂末端的速度和阻抗系数下降幅度计算得到,且所述机械臂的阻尼值介于所述第一预设阻尼值和第二预设阻尼值之间,所述第一预设阻尼值大于所述第二预设阻尼值;
6.根据权利要求5所述的超声机器人扫描控制方法,其特征在于,所述机械臂的阻尼值的计算公式表示为:
7.根据权利要求1所述的超声机器人扫描控制方法,其特征在于,所述根据第一预设阻尼值和所述目标关节力矩控制所述机械臂进行超声扫描之后,还包括:
8.一种超声机器人扫描控制装置,其特征在于,其包括:
9.一种计算机设备,其特征在于,所述计算机设备包括处理器、与所述处理器耦接的存储器,所述存储器中存储有程序指令,所述程序指令被所述处理器执行时,使得所述处理器执行如权利要求1-7中任一项权利要求所述的超声机器人扫描控制方法的步骤。
10.一种存储介质,其特征在于,存储有能够实现如权利要求1-7中任一项所述的超声机器人扫描控制方法的程序指令。
技术总结
本发明公开了一种超声机器人扫描控制方法、装置、设备及存储介质,其中方法包括:在低阻尼模式下,控制机械臂向人体的待扫描区域移动以接触人体,且当接触力达到目标接触力时,进入高精度模式;在高精度模式下,实时获取机械臂末端的交互力和空间位置,并结合目标接触力计算得到目标关节力矩,再根据第一预设阻尼值和目标关节力矩控制机械臂进行超声扫描,低阻尼模式下的阻尼值低于第一预设阻尼值。本发明通过在控制超声机器人进行扫描之前,机械臂自适应调整至低阻尼模式,机械臂的阻尼值降低,柔顺性好,方便操作者移动,在进行扫描时,机械臂自适应调整至高精度模式,机械臂的阻尼值升高,维持超声稳定成像。
技术研发人员:李涛,周寿军,曾泉,钱程,曾伟斌,蒲尧
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!