画线机器人及路径规划方法与流程
本发明属于机器人寻路,尤其涉及一种画线机器人的路径规划方法以及采用该路径规划方法的画线机器人。
背景技术:
1、在进行建筑施工的时候,工人首先要在地基上修建承重墙以及承重柱。为了确保位置不偏移,需要先按照图纸在地面上画出承重墙以及承重柱的位置,从而便于工人施工。
2、现有建筑施工中一般采用人工进行画线。人工画线首先工人劳动强度大,其次人工绘制的图案精细度不够。因此为了解决该问题,市面上拟出现了一种画线机器人,其可通过对上游提供的基础图纸进行读取自动识别出所需要画出的线,然而由于画线机器人不同于其他类型的机器人,现有的路径规划方式来完成画线效率并不高。因此,如何能够高效地完成画线成为当前亟需解决的问题。
技术实现思路
1、本发明的目的在于提供一种画线机器人及路径规划方法,能够一定程度地解决或缓解上述问题,规划出机器人行驶的最优路径,使得机器人在画线时尽量少走重复路线。
2、为了解决上述所提到的技术问题,本发明具体采用的技术方案为一种画线机器人路径规划方法,包括:
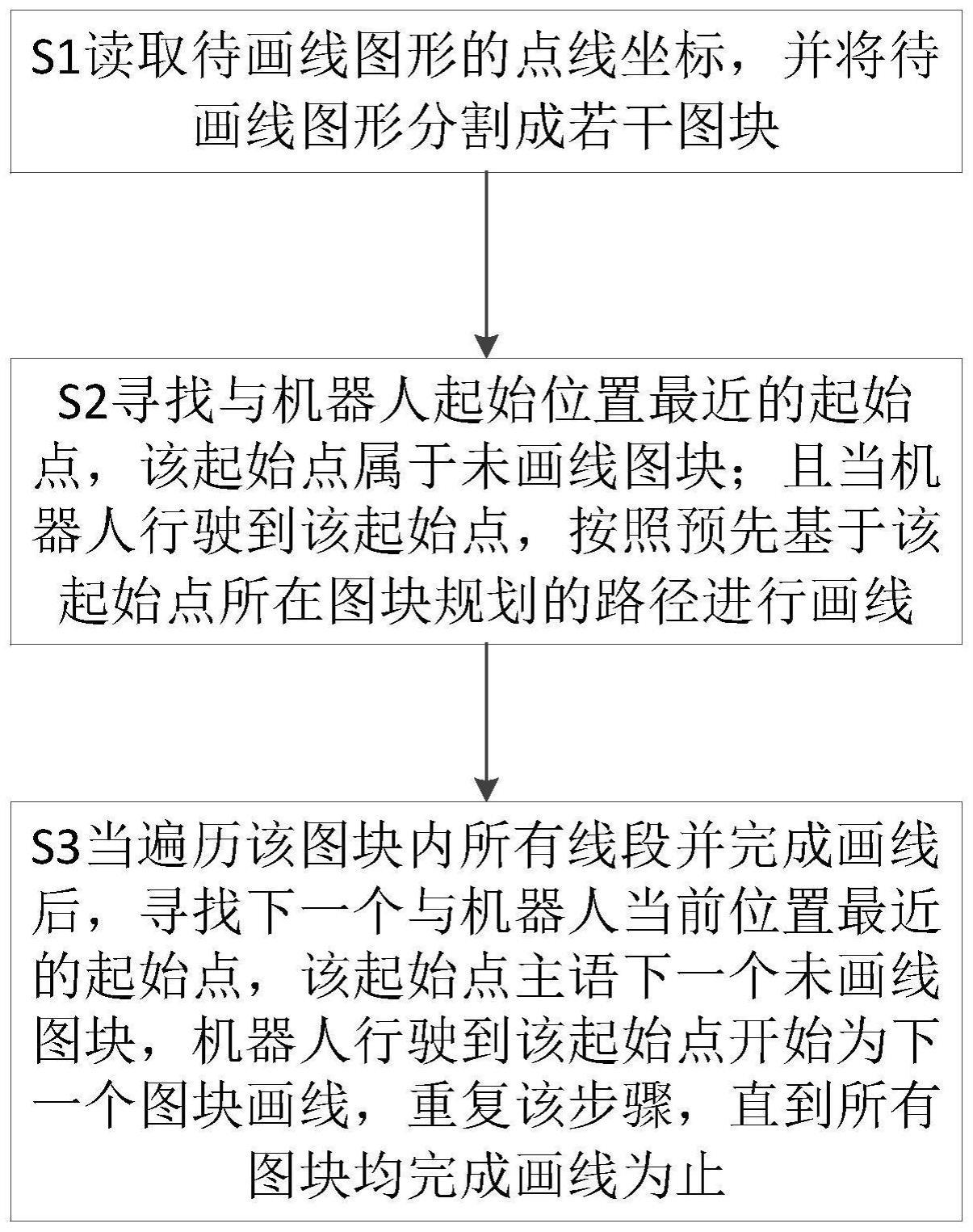
3、读取待画线图形的点线坐标,将所述待画线图形分割成若干图块,所述图块由若干相互连接的线段组成;
4、寻找与所述机器人起始位置最近的起始点,所述起始点属于未画线的所述图块;
5、所述机器人行驶到所述起始点,并按照预先基于所述图框规划的路径进行画线;
6、当遍历所述图块上所有线段并完成画线后,寻找下一个与所述机器人当前所在位置最近的起始点,所述起始点属于下一个未画线图块;所述机器人行驶到所述起始点开始为所述下一个未画线图块画线;重复本步骤,直到所有图块均完成画线为止。
7、作为一种改进,基于所述图块规划路径的步骤具体包括:
8、所述机器人从所述图块内的所述起始点开始,沿与所述起始点连接的未画线线段向与所述起始点之间连线距离最短的端点行驶画线,并沿与所述端点连接的未画线线段向与所述端点连线距离最短的下一端点行驶画线,直到所述图块中所有线段均完成画线为止。
9、作为一种改进,画线过程中,所述机器人每经过一个拐点均将所述拐点记录,所述拐点为所述图块中连接有三条或者三条以上线段的端点;相应地,所述基于所述图块规划路径的步骤还包括:
10、判断所述机器人当前行驶到的所述端点是否还连接有未画线线段;若未连接有未画线线段,则所述机器人回退到已行驶过的,且连接有未画线线段的拐点。
11、作为一种改进,所述机器人回退到已行驶过的,且连接有未画线线段的拐点的步骤,具体包括步骤:
12、所述机器人沿行驶路径回退到最近的一个拐点,并判断当前退回的所述拐点是否连接有未画线线段,
13、若连接有未画线线段,从所述拐点开始,沿与所述拐点连接的未画线线段向与所述拐点连续距离最短的端点开始行驶画线;
14、若未连接有未画线线段,继续退回上一个拐点,并判断其是否连接有未画线线段,直至找到一个连接有未画线线段的拐点。
15、作为一种改进,所述机器人回退到已行驶过的,且连接有未画线线段的拐点的步骤,还包括步骤:若判断出行驶过的所有拐点中均未包含连接有未画线线段,则回退到所述机器人在所述图块内的所述起始点。
16、作为一种改进,将已画线的线段从所述图块中删除或标记。
17、作为一种改进,回退到连接有未画线线段的所述拐点或者所述起始点时,按照两点之间的连线作为所述机器人的回退路径。
18、作为一种改进,当所述图块内与所述起始点连线距离最短的端点,或者与所述拐点连线距离最短的端点有两个或者两个以上时,机器人按照读取顺序选择先读取的端点行驶画线。
19、作为一种改进,所述寻找与所述机器人起始位置最近的起始点的方法包括:
20、获取所述机器人起始位置的点坐标;
21、遍历未画线图块中的所有点的坐标;
22、利用所述起始位置的点坐标与未画线图块中的所有点的坐标求取机器人起始位置到未画线图块中的所有点的距离;
23、选择距离最短的点作为所述起始点。
24、作为一种改进,遍历未画线图块中的所有点的坐标时,优选选择距离所述起始位置最近的一个图块,然后遍历其内部的所有点的坐标,并找到所述图块内距离所述起始位置最短的一个点。
25、作为一种改进,读取待画线图形的点线坐标时,计算每条线段的长度。
26、本发明还提供一种画线机器人,所述画线机器人在画线时采用上述路径规划方法进行路径规划。
27、本发明的有益之处在于:
28、本发明首先,将待画线图形中各个相连线段作为一个图块,然后针对每个图块进行画线的最优路径规划,然后再针对图块与图块之间的最优路径,从而通过高效率的线路规划,使得画线机器人进行画线时能够走尽量短的回头路,提高了机器人画线的效率。
29、机器人会将已画线的线段从图块中删除或标记,能够避免画线机器人重复画线。
30、在需要回退到上一个连接有未画线线段的拐点或者起始点时,按照两点之间的连线(或直线距离)作为回退路径,而并非原路返回,采用了两点之间直线最短的原理,大大降低了机器人所行使的路程。
31、当图块内与机器人起始点或者拐点连线距离最短的端点有两个或者两个以上时,机器人按照读取顺序选择先读取的端点行驶画线,通过简单的抉择方式解决了多选一的问题,从而无需设计更加复杂和精确的算法来进行端点选择,进而无需消耗机器人的算力,也即无需大幅提升机器人的计算性能,一定程度上降低了机器人的造价成本。
技术特征:
1.一种画线机器人路径规划方法,其特征在于包括:
2.根据权利要求1所述的一种画线机器人路径规划方法,其特征在于:画线过程中,所述机器人每经过一个拐点均将所述拐点记录,所述拐点为所述图块中连接有三条或者三条以上线段的端点;相应地,所述基于所述图块规划路径的步骤还包括:
3.根据权利要求2所述的一种画线机器人路径规划方法,其特征在于:所述机器人回退到最后经过且连接有未画线线段的拐点的步骤,具体包括步骤:
4.根据权利要求3所述的一种画线机器人路径规划方法,其特征在于:所述机器人回退到已行驶过的,且连接有未画线线段的拐点的步骤,还包括步骤:
5.根据权利要求4所述的一种画线机器人路径规划方法,其特征在于:将已画线的线段从所述图块中删除或标记。
6.根据权利要求4所述的一种画线机器人路径规划方法,其特征在于:回退到连接有未画线线段的所述拐点或者所述起始点时,按照两点之间的连线作为所述机器人的回退路径。
7.根据权利要求5所述的一种画线机器人路径规划方法,其特征在于:当所述图块内与所述起始点连线距离最短的端点,或者与所述拐点连线距离最短的端点有两个或者两个以上时,所述机器人按照读取顺序选择先读取的所述端点行驶画线。
8.根据权利要求1所述的一种画线机器人路径规划方法,其特征在于,所述寻找与所述机器人起始位置最近的起始点的步骤具体包括:获取所述机器人起始位置的点坐标;
9.根据权利要求1所述的一种画线机器人路径规划方法,其特征在于:读取所述待画线图形的点线坐标时,计算每条线段的长度。
10.一种画线机器人,其特征在于,所述画线机器人在画线时采用权利要求1~9中任意一种路径规划方法进行路径规划。
技术总结
本发明公开了一种画线机器人及路径规划方法,属于机器人寻路技术领域,该方法包括:读取待画线图形的点线坐标,将待画线图形分割成若干图块,所述图块由若干相互连接的线段组成;寻找与机器人起始位置最近的起始点,该起始点属于未画线图块;当机器人行驶到该起始点,按照预先基于图块规划的路径进行画线;当遍历该图块上所有线段并完成画线后,寻找下一个与机器人当前所在位置最近的起始点,该起始点属于下一个未画线图块;机器人行驶到该起始点开始为该下一个图块画线;重复本步骤,直到所有图块均完成画线为止。本发明通过高效率的线路规划,使得画线机器人进行画线时能够走尽量短的回头路,提高了机器人画线的效率。
技术研发人员:朱怀波,陈勇杭,刘文雅
受保护的技术使用者:重庆明月湖智能科技发展有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!