应急操作机器人、铁路牵引变电所应急操作系统和方法与流程
本申请涉及铁路牵引变电所监控技术,尤其涉及一种应急操作机器人、铁路牵引变电所应急操作系统和方法。
背景技术:
1、铁路牵引变电所将发电厂传输来的电压转换为车辆运行所需动力电压,是电气化铁路列车运行的重要动力来源,是列车牵引供电的核心场所。
2、牵引变电所的主要设备包括用于变换电压的变压器、用于接受和分配电能的配电装置以及用于控制和保护的隔离开关,这些保护隔离开关由变电所综合自动化系统控制,维护人员通过综合自动化系统盘柜上的按钮开关和旋钮开关进行控制。同时,综合自动化系统与设置在供电段和铁路局的远动scada(supervisory control and dataacquisition,即数据采集与监视控制)系统联动,进行远动控制。无人值守变电所当设备发生故障或出现突发情况需要紧急切换隔离开关时,一般供电段人员远程控制开关动作,但是当远动通信异常或综合自动化系统故障等极端情况出现时,远动失效,无法实现远程切换。人员又无法及时赶赴现场,导致开关无法及时切换,带来巨大的安全隐患和经济损失。
技术实现思路
1、本申请实施例提供了一种应急操作机器人、铁路牵引变电所应急操作系统和方法,能够实现对牵引变电所突发状况的应急处理。
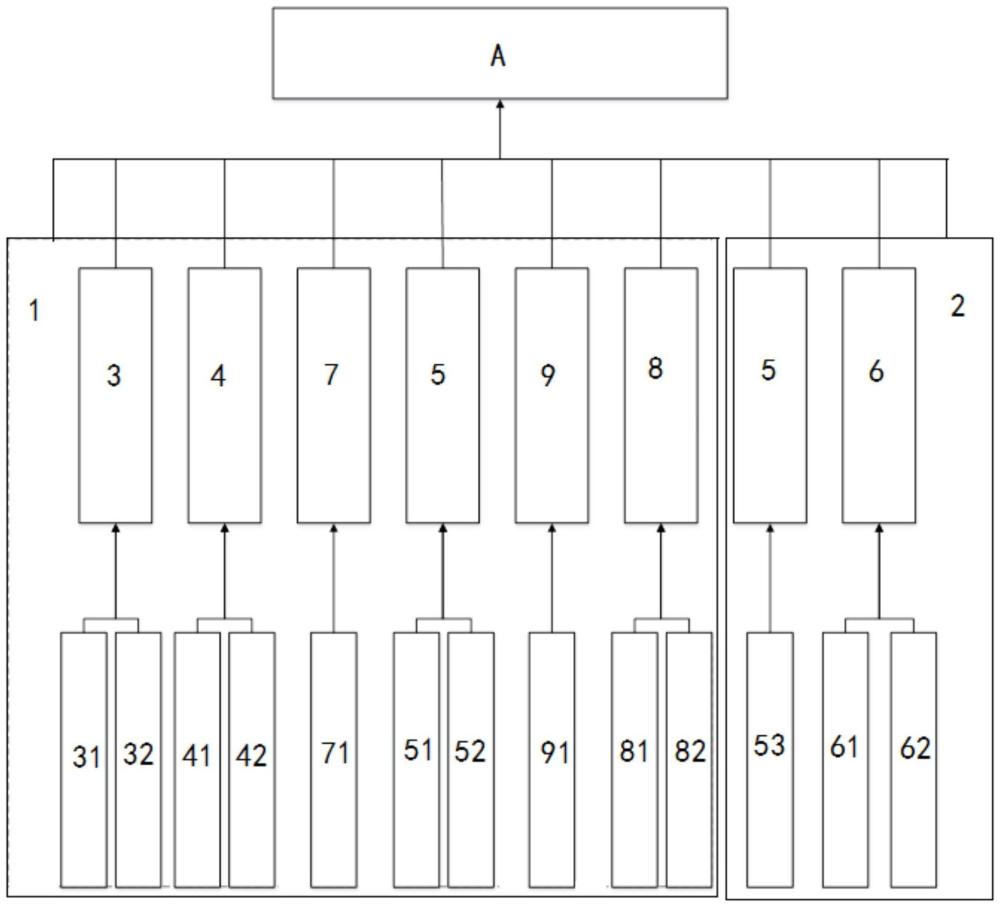
2、本申请实施例还提供了一种应急操作机器人,设置于铁路牵引变电所内,可以包括:轮式机器人底盘和设置于所述轮式机器人底盘上的机身;还包括:主控模块以及分别与所述主控模块连接的驱动模块、导航定位模块和操作模块;所述轮式机器人底盘上设置有所述主控模块和所述驱动模块;所述机身上设置有所述操作模块;
3、所述主控模块,可以设置为采集所述驱动模块、所述导航定位模块和所述操作模块的数据,并对所述驱动模块、所述导航定位模块和所述操作模块进行控制;
4、所述驱动模块,设置为驱动所述轮式机器人底盘运行至所述铁路牵引变电所内的目标设备处,驱动所述操作模块运行至所述目标设备上的待操作部件处,并驱动所述操作模块对所述待操作部件执行设定操作;
5、所述导航定位模块,可以设置为在所述轮式机器人底盘运行至所述目标设备过程中对所述轮式机器人底盘的运行目标位置进行导航和定位,对所述操作模块的放置目标位置进行定位。
6、在本申请的示例性实施例中,所述主控模块可以包括工控机;
7、所述工控机,可以设置为采集所述驱动模块、所述导航定位模块和所述操作模块的数据,并对所述驱动模块、所述导航定位模块和所述操作模块进行控制。
8、在本申请的示例性实施例中,所述驱动模块包括均与所述工控机相连的第一驱动模块、第二驱动模块和第三驱动模块;
9、所述第一驱动模块,设置为驱动所述轮式机器人底盘运行至所述目标设备处;
10、所述第二驱动模块,设置为驱动所述操作模块运行至所述待操作部件处;
11、所述第三驱动模块,设置为驱动所述操作模块对所述待操作部件执行所述设定操作。
12、在本申请的示例性实施例中,所述导航定位模块可以包括:分别与所述工控机相连的初步导航定位模块和二次定位模块;
13、所述初步导航定位模块,设置为对所述轮式机器人底盘的运行目标位置进行导航定位;
14、所述二次定位模块,设置为确定所述操作模块的放置目标位置。
15、在本申请的示例性实施例中,所述操作模块可以包括机械臂和设置于所述机械臂末端的机械爪;
16、所述机械臂,设置为带动所述机械爪达到所述待操作部件所在位置;
17、所述机械爪,设置为对所述待操作部件完成所述设定操作;所述设定操作可以包括:对按钮的按压和/或对旋钮的旋转。
18、在本申请的示例性实施例中,所述机械爪可以包括:丝杠和金属手指;
19、所述驱动模块,还设置为带动所述丝杠运动;
20、所述丝杠,设置为带动所述金属手指完成所述设定操作。
21、在本申请的示例性实施例中,所述轮式机器人底盘上还设置有运动辅助模块;
22、所述运动辅助模块,设置为检测所述应急操作机器人前后方障碍物。
23、在本申请的示例性实施例中,所述轮式机器人底盘上还设置有通讯模块;
24、所述通讯模块包含无线访问接入点ap和交换机;
25、所述ap通过所述交换机与本地监控子系统的无线基站建立网络通道,进行数据交互。
26、本申请实施例还提供了一种铁路牵引变电所应急操作系统,可以包括:远程集控中心子系统、本地监控子系统和上述的应急操作机器人;
27、所述远程集控中心子系统包括监控终端和操作后台终端,所述监控终端和所述操作后台终端设置于供电段;
28、所述本地监控子系统设置于所述铁路牵引变电所内;所述本地监控子系统包括本地后台终端;
29、所述本地后台终端与所述监控终端和所述操作后台终端通过接入数据网通讯;所述本地后台终端和所述应急操作机器人通过无线网络通讯。
30、本申请实施例还提供了一种铁路牵引变电所应急操作方法,基于所述的铁路牵引变电所应急操作系统;所述方法可以包括:
31、所述铁路牵引变电所应急操作系统中位于铁路牵引变电所内的本地监控子系统接收所述铁路牵引变电所应急操作系统的位于供电段的远程集控中心子系统发送的应急操作指令,并将所述应急操作指令传输至所述铁路牵引变电所应急操作系统的位于铁路牵引变电所内的应急操作机器人;
32、所述应急操作机器人根据所述应急操作指令,采用所述应急操作机器人自身的导航定位模块进行导航和定位,运行至所述铁路牵引变电所内的目标设备处,并驱动所述应急操作机器人自身的操作模块运行至所述目标设备上的待操作部件处,驱动所述操作模块对所述待操作部件执行设定操作。
33、本申请实施例的应急操作机器人设置于铁路牵引变电所内,可以包括:轮式机器人底盘和设置于所述轮式机器人底盘上的机身;还包括:主控模块以及分别与所述主控模块连接的驱动模块、导航定位模块和操作模块;所述轮式机器人底盘上设置有所述主控模块和所述驱动模块;所述机身上设置有所述操作模块;所述主控模块,设置为采集所述驱动模块、所述导航定位模块和所述操作模块的数据,并对所述驱动模块、所述导航定位模块和所述操作模块进行控制;所述驱动模块设置为驱动所述轮式机器人底盘运行至所述铁路牵引变电所内的目标设备处,驱动所述操作模块运行至所述目标设备上的待操作部件处,驱动所述操作模块对所述待操作部件执行设定操作;所述导航定位模块,设置为对所述轮式机器人底盘的运行目标位置进行导航和定位,对所述操作模块的放置目标位置进行定位。通过该实施例方案实现了对牵引变电所突发状况的应急处理。
34、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
技术特征:
1.一种应急操作机器人,其特征在于,设置于铁路牵引变电所内,包括:轮式机器人底盘和设置于所述轮式机器人底盘上的机身;还包括:主控模块以及分别与所述主控模块连接的驱动模块、导航定位模块和操作模块;所述轮式机器人底盘上设置有所述主控模块和所述驱动模块;所述机身上设置有所述操作模块;
2.根据权利要求1所述的应急操作机器人,其特征在于,所述主控模块,包括工控机;
3.根据权利要求2所述的应急操作机器人,其特征在于,所述驱动模块包括均与所述工控机相连的第一驱动模块、第二驱动模块和第三驱动模块;
4.根据权利要求2所述的应急操作机器人,其特征在于,所述导航定位模块包括:分别与所述工控机相连的初步导航定位模块和二次定位模块;
5.根据权利要求1所述的应急操作机器人,其特征在于,所述操作模块包括机械臂和设置于所述机械臂末端的机械爪;
6.根据权利要求5所述的应急操作机器人,其特征在于,所述机械爪包括:丝杠和金属手指;
7.根据权利要求1所述的应急操作机器人,其特征在于,所述轮式机器人底盘上还设置有运动辅助模块;
8.根据权利要求1所述的应急操作机器人,其特征在于,所述轮式机器人底盘上还设置有通讯模块;
9.一种铁路牵引变电所应急操作系统,其特征在于,包括:远程集控中心子系统、本地监控子系统和权利要求1-8任意一项所述的应急操作机器人;
10.一种铁路牵引变电所应急操作方法,其特征在于,基于权利要求9所述的铁路牵引变电所应急操作系统;所述方法包括:
技术总结
本申请实施例公开了一种应急操作机器人和铁路牵引变电所应急操作系统,应急操作机器人包括:轮式机器人底盘和机身;还包括主控模块、驱动模块、导航定位模块和操作模块;轮式机器人底盘上设有机身、主控模块、驱动模块;机身上设有操作模块;主控模块对其它模块进行数据采集和控制;驱动模块驱动轮式机器人底盘运行至铁路牵引变电所内目标设备处,驱动操作模块运行至目标设备上待操作部件处,驱动操作模块对待操作部件执行设定操作;导航定位模块对轮式机器人底盘的运行目标位置进行导航和定位,对操作模块的放置目标位置进行定位。该实施例方案实现了对牵引变电所突发状况的应急处理。
技术研发人员:程远,石韬,张明,石立伟
受保护的技术使用者:西安和利时系统工程有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!