一种放线用喷涂式划印机器人的制作方法
本发明涉及一种放线用喷涂式划印机器人,属于电力技术设备。
背景技术:
1、在我国,输电线路架线施工附件安装作业方面,大都依靠人力辅助使用工器具进行附件安装作业。其中间隔棒由于其防振,分隔各子导线,防止线间鞭击的作用而广泛应用于输电线路架线施工过程中。跨越施工期间,间隔棒安装位置的确定往往需要人工进行测量标记,一方面作业依靠人员的主观经验判断,高空测量定位作业不精确,很难保证附件安装质量一次成优;另一方面需要施工人员在跨越塔间的线上进行行走测量,这样大大增加了施工人员疲劳程度,也给施工人员的人身安全带来隐患。
2、可见,为降低人工测量带来的误差与安全隐患,亟需一种放线用喷涂式划印机器人。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种放线用喷涂式划印机器人,通过设置行走模块和划印模块,能够实现行走划印,并通过电控定位模块实现准确定位,能够达到快速附件安装作业的目标,从而实现输电线路多分裂导线间隔棒安装位置的定位划印。
2、为达到上述目的/为解决上述技术问题,本发明是采用下述技术方案实现的:
3、一种放线用喷涂式划印机器人,包括行走模块、划印模块和电控定位模块,其中,
4、所述行走模块包括主动轮、从动轮、编码器、联动件和驱动电机,所述主动轮与从动轮安装于安装架之间,所述联动件用于联动主动轮、编码器和驱动电机,在行走时,导线位于主动轮与从动轮之间,联动件将驱动电机的动力传递至主动轮与编码器处使其转动,编码器用于记录行走模块的行走数据;
5、所述划印模块与行走模块相连接,用于随行走模块移动进行喷涂划印;
6、所述电控定位模块与编码器信号连接,用于根据编码器反馈的行走数据进行距离定位。
7、进一步的,还包括压紧结构,用于压紧导线,所述压紧结构包括压紧弹簧、镀铬伸缩杆、铝合金方管和压紧拉把手,其中,
8、所述铝合金方管与安装架相固定,用于支撑镀铬伸缩杆与压紧弹簧,所述压紧弹簧套设于镀铬伸缩杆的外侧,所述镀铬伸缩杆一端与铝合金方管固定,另一端与压紧拉把手固定,压紧拉把手设置于镀铬伸缩杆靠近导线的一端,所述压紧弹簧的两端分别与镀铬伸缩杆以及压紧拉把手相搭接。
9、进一步的,所述主动轮的数量为两个,从动轮的数量为三个,其中,主动轮和从动轮均为尼龙轮。
10、进一步的,所述联动件包括链条和链轮,所述链轮分别与驱动电机、编码器以及主动轮同轴,链条与链轮相传动,当驱动电机转动时,链条带动链轮转动以实现主动轮及编码器的转动。
11、进一步的,所述划印模块包括墨盒、喷码隔膜泵、旋转接头、电机和机械臂,其中,
12、所述墨盒与喷码隔膜泵分别安装于安装架的两侧的集装箱一和集装箱二内,并通过管道相连通,所述旋转接头安装于集装箱二的外侧,用于连接喷码隔膜泵与机械臂末端的喷头,以实现喷涂划印,所述旋转接头由设置于集装箱二内的电机驱动转动,用于实现机械臂的旋转。
13、进一步的,还包括旋转接头连接管,所述旋转接头连接管用于连接旋转接头与喷码隔膜泵。
14、进一步的,所述机械臂包括固定连接板、喷头固定板、探测头、喷头和电动推缸,其中,
15、所述固定连接板与旋转接头相固定,所述电动推缸安装于固定连接板的侧面,所述电动推缸的伸出端安装有喷头固定板,所述喷头固定板用于固定喷头与探测头,以通过电动推缸与旋转接头实现喷头的远近伸缩和旋转。
16、进一步的,所述电控定位模块包括直流接触器、锂电池、驱动电机驱动器、电控控制端和信号接收发射器,其中,
17、所述信号接收发射器安装于集装箱二的外侧,信号连接有地面遥控模块,用于与地面遥控模块互换信号,所述驱动电机驱动器与驱动电机信号连接,所述电控控制端分别与驱动电机驱动器、划印模块以及信号接收发射器信号连接,用于控制设备的行走与喷涂划印,所述锂电池安装于集装箱二内,用于为用电模块供电,所述直流接触器设置于锂电池与电控控制端之间,用于保护电路。
18、进一步的,还包括摄像头,所述摄像头安装于安装架的顶侧,用于与探测头监控导线划印的水平位置情况。
19、进一步的,所述地面遥控模块包括显示屏和手动控制端,所述显示屏与摄像头及探测头信号连接,用于接收并显示作业数据,所述手动控制端与电控定位模块及划印模块信号连接,用于在地面遥控设备的行走与划印。
20、与现有技术相比,本发明所达到的有益效果:
21、本发明提供的放线用喷涂式划印机器人,通过设置行走模块和划印模块,能够实现行走划印,并通过电控定位模块实现准确定位,能够达到快速附件安装作业的目标,从而实现输电线路多分裂导线间隔棒安装位置的定位划印;
22、本发明提供的放线用喷涂式划印机器人,通过设置压紧结构,使得在对导线进行压紧时,可以通过调节压紧拉把手来实现对导线压紧的程度,以便导线的安装,保证设备行走时的稳定性。
技术特征:
1.一种放线用喷涂式划印机器人,其特征在于,包括行走模块、划印模块和电控定位模块,其中,
2.根据权利要求1所述的放线用喷涂式划印机器人,其特征在于,还包括压紧结构,用于压紧导线,所述压紧结构包括压紧弹簧(5)、镀铬伸缩杆(6)、铝合金方管(7)和压紧拉把手(8),其中,
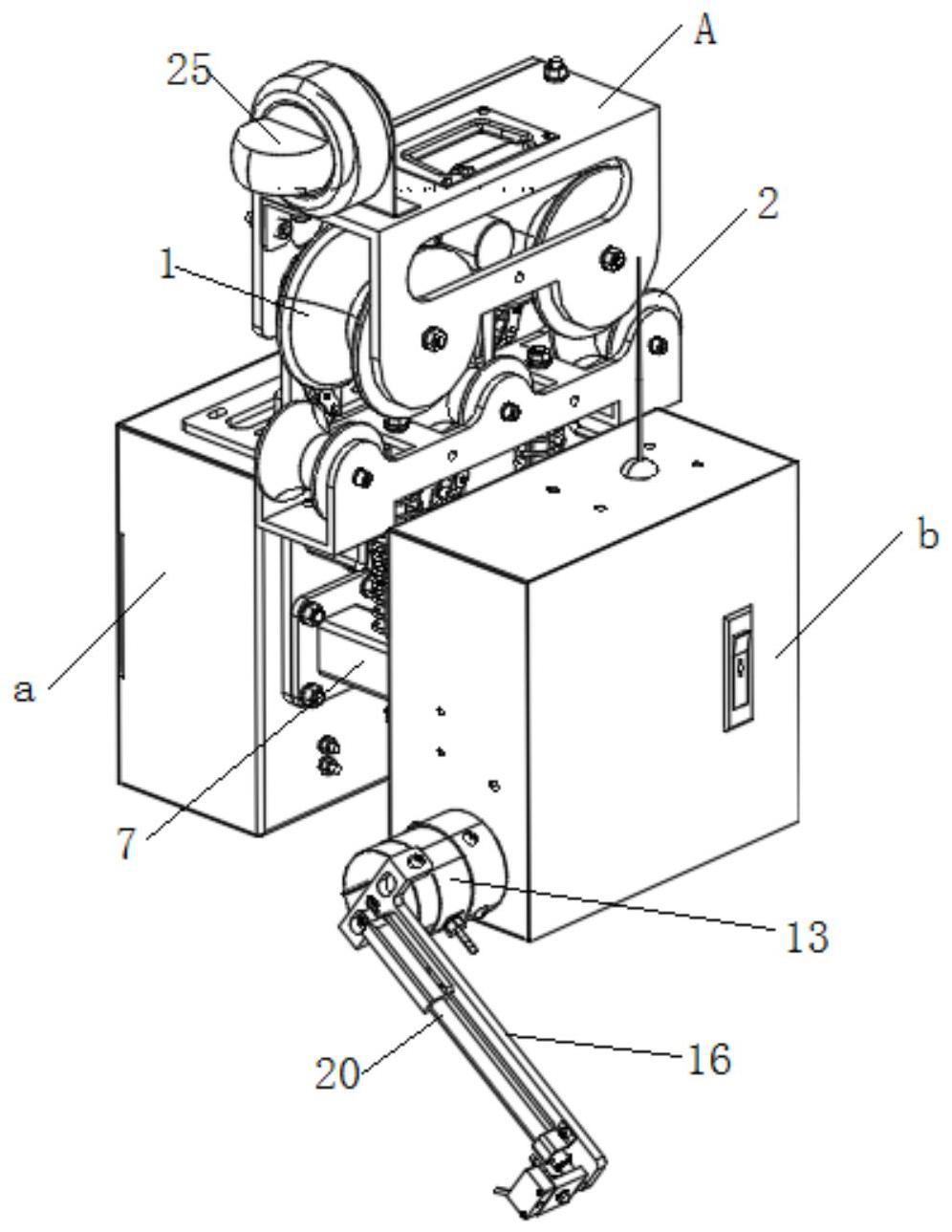
3.根据权利要求1所述的放线用喷涂式划印机器人,其特征在于,所述主动轮(1)的数量为两个,从动轮(2)的数量为三个,其中,主动轮(1)和从动轮(2)均为尼龙轮。
4.根据权利要求1所述的放线用喷涂式划印机器人,其特征在于,所述联动件包括链条(9)和链轮(10),所述链轮(10)分别与驱动电机(4)、编码器(3)以及主动轮(1)同轴,链条(9)与链轮(10)相传动,当驱动电机(4)转动时,链条(9)带动链轮(10)转动以实现主动轮(1)及编码器(3)的转动。
5.根据权利要求1所述的放线用喷涂式划印机器人,其特征在于,所述划印模块包括墨盒(11)、喷码隔膜泵(12)、旋转接头(13)、电机(14)和机械臂,其中,
6.根据权利要求5所述的放线用喷涂式划印机器人,其特征在于,还包括旋转接头连接管(15),所述旋转接头连接管(15)用于连接旋转接头(13)与喷码隔膜泵(12)。
7.根据权利要求5所述的放线用喷涂式划印机器人,其特征在于,所述机械臂包括固定连接板(16)、喷头固定板(17)、探测头(18)、喷头(19)和电动推缸(20),其中,
8.根据权利要求1所述的放线用喷涂式划印机器人,其特征在于,所述电控定位模块包括直流接触器、锂电池(21)、驱动电机驱动器(22)、电控控制端(23)和信号接收发射器(24),其中,
9.根据权利要求1所述的放线用喷涂式划印机器人,其特征在于,还包括摄像头(25),所述摄像头(25)安装于安装架的顶侧,用于与探测头(18)监控导线划印的水平位置情况。
10.根据权利要求8所述的放线用喷涂式划印机器人,其特征在于,所述地面遥控模块包括显示屏(26)和手动控制端(27),所述显示屏(26)与摄像头(25)及探测头(18)信号连接,用于接收并显示作业数据,所述手动控制端(27)与电控定位模块及划印模块信号连接,用于在地面遥控设备的行走与划印。
技术总结
本发明公开了一种放线用喷涂式划印机器人,包括行走模块、划印模块和电控定位模块,其中,所述行走模块包括主动轮、从动轮、编码器、联动件和驱动电机,所述主动轮与从动轮安装于安装架之间,所述联动件用于联动主动轮、编码器和驱动电机,在行走时,导线位于主动轮与从动轮之间,联动件将驱动电机的动力传递至主动轮与编码器处使其转动,编码器用于记录行走模块的行走数据;所述划印模块与行走模块相连接。该放线用喷涂式划印机器人,通过设置行走模块和划印模块,能够实现行走划印,并通过电控定位模块实现准确定位,能够达到快速附件安装作业的目标,从而实现输电线路多分裂导线间隔棒安装位置的定位划印。
技术研发人员:何伟杰,马龙,夏顺俊,戴如章,陈浩,何逸飞,金禄海,陈彬,孙浩南
受保护的技术使用者:江苏省送变电有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!