机器人的手眼标定方法、设备、机器人及计算机存储介质与流程
本发明涉及机器人领域,特别涉及一种机器人的手眼标定方法、设备、机器人及计算机存储介质。
背景技术:
1、近年来,随着科学技术的快速发展,机器人产品不断更新迭代,并广泛应用于医疗、教育、工业等众多领域。
2、机器人在工作过程中通常需要借助相机对目标物进行视觉定位,以获取目标物在工作空间中的位置,方便执行后续的操作,比如抓取、焊接等。在机器人与相机进行协同工作时,为使相机(亦即机器人的眼)与机器人(亦即机器人的手)坐标系之间建立关系,需对机器人与相机坐标系进行标定,也即手眼标定。
3、机器人与相机的手眼标定需要借助标定板,目前通常是人为手动移动机器人确认若干个拍照点,保证拍照时,标定板处于相机的拍照视野内。并在每一个拍照点处记录机械臂的位置信息并通过相机拍照采集标定板信息,进而根据所获取的若干组机械臂的位置信息和标定板信息,进行机器人与相机的手眼标定。然而,拍照点位一般都大于10个,每一个拍照点位都需人为手动移动机器人至合适的位置,操作重复且耗时长,标定效率低;并且,若干个拍照点位通过人为选取,容易出现姿态差异较小的情况,标定效果不佳。
技术实现思路
1、本发明的主要目的是提出一种机器人的手眼标定方法,旨在解决背景技术中所指出的技术问题。
2、为实现上述目的,本发明提出一种机器人的手眼标定方法,其中,机器人包括机械臂和相机,机械臂的末端可于运动空间中运动,相机设置在机械臂上且与末端的位置相对固定,机械臂的运动空间中设置有标定板;
3、机器人的手眼标定方法包括:
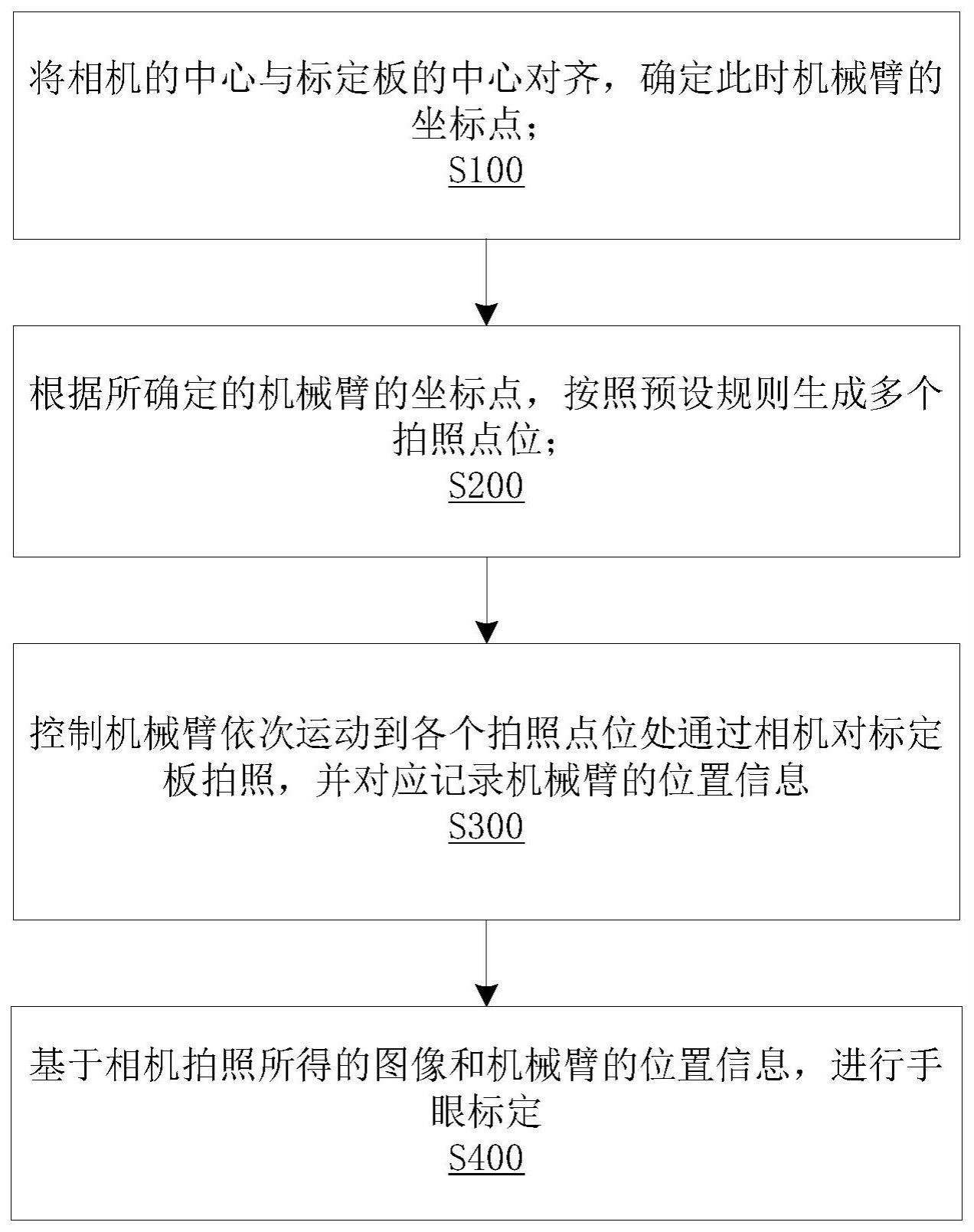
4、将相机的中心与标定板的中心对齐,确定此时机械臂的坐标点;
5、根据预设规则生成机械臂的坐标点对应的多个拍照点位;
6、控制机械臂依次运动到各个拍照点位处通过相机对标定板拍照,并对应记录机械臂的位置信息;
7、基于相机拍照所得的图像和机械臂的位置信息,进行手眼标定。
8、其中,根据预设规则生成机械臂的坐标点对应的多个拍照点位的步骤包括:
9、在机械臂的坐标点与标定板的中心点的连线上选取轴线点,确定经过轴线点且平行于标定板的标定面的若干条轴线;
10、将连线分别绕各轴线进行预设旋转处理,确定连线绕每一轴线预设旋转处理后机械臂的坐标点到达的点位,将确定的每一个点位均作为拍照点位。
11、其中,确定经过轴线点的若干条轴线的步骤包括:
12、以轴线点为圆心作圆并在圆上按第一预设角度间隔取点以获得若干个圆周点;
13、将若干个圆周点与轴线点进行连线以获得若干条轴线。
14、其中,将连线分别绕各轴线进行预设旋转处理的步骤包括:
15、将连线分别绕各轴线正向和/或反向旋转第二预设角度。
16、其中,根据所确定的机械臂的坐标点,按照预设规则生成多个拍照点位的步骤还包括:
17、在连线上选取新的坐标点并将其与轴线点相连形成取点线;
18、将取点线分别绕各轴线进行预设旋转处理,确定取点线绕每一轴线预设旋转处理后新的坐标点到达的点位,将确定的每一个点位均作为拍照点位。
19、其中,将取点线分别绕各轴线进行预设旋转处理的步骤包括:
20、将取点线分别绕各轴线正向和/或反向旋转第三预设角度。
21、其中,根据所确定的机械臂的坐标点,按照预设规则生成多个拍照点位包括:
22、将机械臂的坐标点作为初始的拍照点位。
23、本发明还提出一种机器人的手眼标定设备,该机器人的手眼标定设备包括:
24、存储器,用于存储计算机程序;
25、处理器,用于执行计算机程序时实现如前述机器人的手眼标定方法的步骤。
26、本发明还提出一种机器人,该机器人包括:
27、机械臂,机械臂的末端可于运动空间中运动,机械臂的运动空间中设置有标定板;
28、相机,相机设置在机械臂上且与末端的位置相对固定;
29、上述的手眼标定设备,所述手眼标定设备与所述机械臂和所述相机通信连接。
30、本发明还提出一种计算机存储介质,其中,计算机存储介质上存储有计算机程序,计算机程序被处理器执行时实现如前述机器人的手眼标定方法的步骤。
31、本发明机器人的手眼标定方法用于实现机器人的手眼标定,其中,机器人包括机械臂和相机,机械臂的末端可于运动空间中运动,相机设置在机械臂上且与末端的位置相对固定,机械臂的运动空间中设置有标定板。具体地,本机器人的手眼标定方法首先将相机的中心与标定板的中心对齐,确定此时机械臂的坐标点;根据所确定的机械臂的坐标点,按照预设规则生成多个拍照点位;控制机械臂依次运动到各个拍照点位处通过相机对标定板拍照,并对应记录机械臂的位置信息;基于相机拍照所得的图像和机械臂的位置信息,进行手眼标定。即本发明机器人的手眼标定方法可根据相机的中心与标定板的中心对齐时机械臂的坐标点,按照预设规则自动生成多个机械臂拍照点位,相较于人为手动移动机械臂确定拍照点位,操作简单且节省时间,提高了标定效率,并且,可保证各拍照点位之间存在较大的姿态差异,提高了标定效果。
技术特征:
1.一种机器人的手眼标定方法,其特征在于,所述机器人包括机械臂和相机,所述机械臂的末端可于运动空间中运动,所述相机设置在所述机械臂上且与所述末端的位置相对固定,所述机械臂的运动空间中设置有标定板;
2.根据权利要求1所述的机器人的手眼标定方法,其特征在于,所述根据所确定的机械臂的坐标点,按照预设规则生成多个拍照点位的步骤包括:
3.根据权利要求2所述的机器人的手眼标定方法,其特征在于,所述确定经过所述轴线点的若干条轴线的步骤包括:
4.根据权利要求2或3所述的机器人的手眼标定方法,其特征在于,将所述连线分别绕各轴线进行预设旋转处理的步骤包括:
5.根据权利要求2或3所述的机器人的手眼标定方法,其特征在于,所述根据所确定的所述机械臂的坐标点,按照预设规则生成多个拍照点位的步骤还包括:
6.根据权利要求5所述的机器人的手眼标定方法,其特征在于,将所述取点线分别绕各轴线进行预设旋转处理的步骤包括:
7.根据权利要求1所述的机器人的手眼标定方法,其特征在于,所述根据所确定的所述机械臂的坐标点,按照预设规则生成多个拍照点位包括:
8.一种机器人的手眼标定设备,其特征在于,包括:
9.一种机器人,其特征在于,包括:
10.一种计算机存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述机器人的手眼标定方法的步骤。
技术总结
本发明公开一种机器人的手眼标定方法、设备、机器人及计算机存储介质,机器人的手眼标定方法包括:将相机的中心与标定板的中心对齐,确定此时机械臂的坐标点;根据所确定的机械臂的坐标点,按照预设规则生成多个拍照点位;控制机械臂依次运动到各个拍照点位处通过相机对标定板拍照,并对应记录机械臂的位置信息;基于相机拍照所得的图像和机械臂的位置信息,进行手眼标定。本发明机器人的手眼标定方法可根据相机与标定板中心对齐时机械臂的坐标点,按照预设规则自动生成多个机械臂拍照点位,相较于人为手动移动机械臂确定拍照点位,操作简单且节省时间,提高了标定效率,并且,可保证各拍照点位之间存在较大的姿态差异,提高了标定效果。
技术研发人员:李文智,蔡同彪,郎需林,姜宇
受保护的技术使用者:深圳市越疆科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!