标定板、机械臂的手眼标定数据采集方法及手眼标定方法与流程
本发明涉及机械臂领域,特别涉及一种标定板、机械臂的手眼标定数据采集方法及手眼标定方法。
背景技术:
1、近年来,随着科学技术的快速发展,机械臂产品不断更新迭代,并广泛应用于医疗、教育、工业等众多领域。
2、机械臂在工作过程中通常需要对目标物进行视觉定位,以获取目标物在工作空间中的位置,方便执行后续的操作,比如抓取,焊接等。在机械臂与相机进行协同工作时,为使相机(亦即机械臂的眼)与机械臂(亦即机械臂的手)坐标系之间建立关系,需对机械臂与相机坐标系进行标定,也即机械臂的手眼标定。
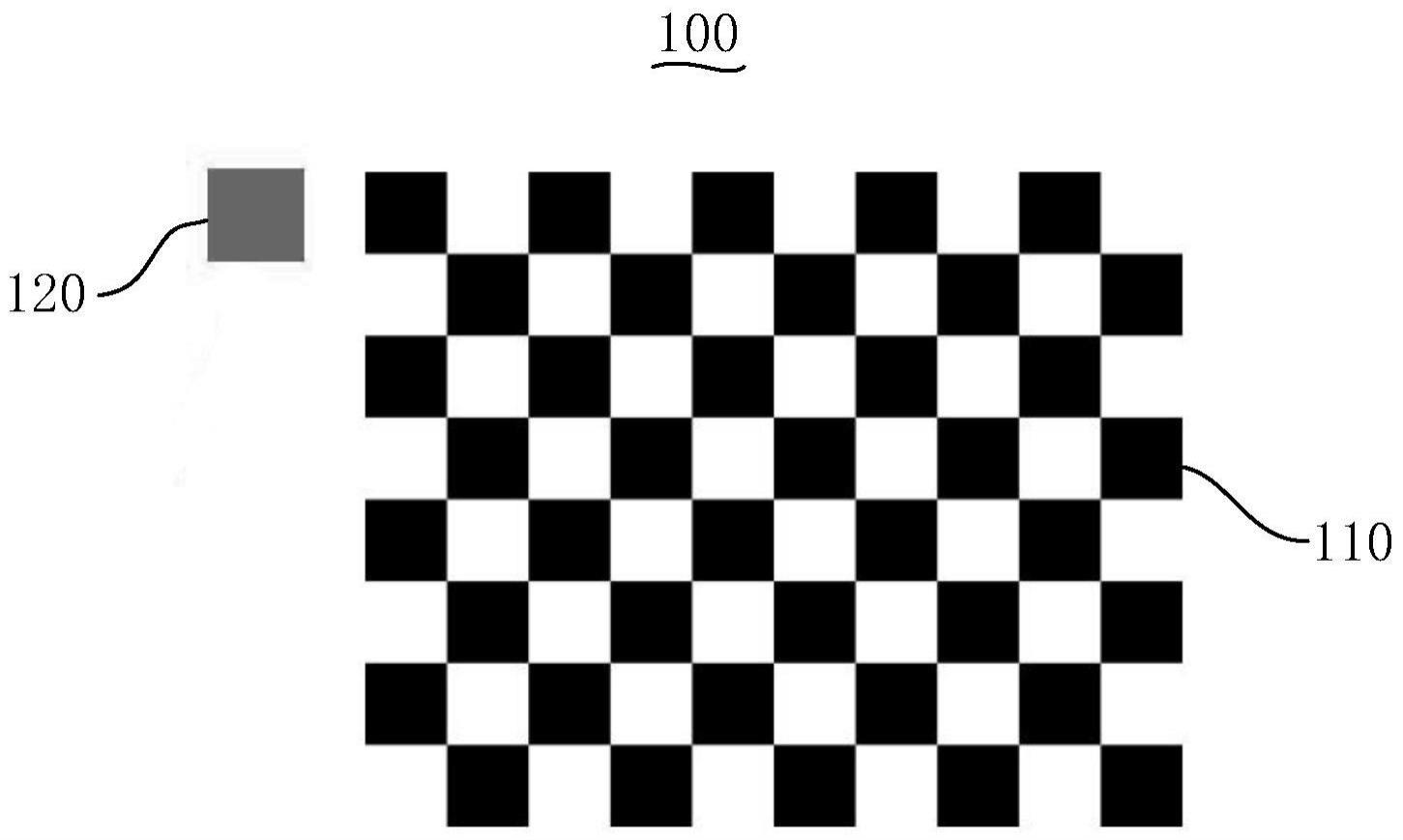
3、机械臂的手眼标定需要借助标定板,目前通常是移动机械臂确认若干个拍照点,保证拍照时,标定板处于相机的拍照视野内。并在每一个拍照点处记录机械臂的位置信息并通过相机拍照采集标定板信息,进而根据所获取的若干组机械臂的位置信息和标定板信息,进行机械臂与相机的手眼标定。如图1所示,现有的标定板通常为方格阵列图案,然而如图2所示,有的标定板的方格阵列图案关于中心对称,无法保证机械臂手眼标定过程中,所检测标定板的角度与实际旋转姿态的唯一对应性,从而不能用于机械臂的手眼标定。
技术实现思路
1、本发明的主要目的是提出一种标定板,旨在解决上述背景技术中所指出的技术问题。
2、为实现上述目的,本发明提出一种标定板,其中,标定板上具有棋盘格图案和定向标识图案,定向标识图案间隔设置于棋盘格图案的外侧,定向标识图案用于作为定向参照以供识别。
3、其中,定向标识图案与棋盘格图案的方格的颜色不同;和/或,
4、定向标识图案与棋盘格图案的方格的形状不同;和/或,
5、定向标识图案与棋盘格图案的方格的尺寸不同;和/或,
6、定向标识图案中具有识别码。
7、其中,定向标识图案位于棋盘格图案的一侧且与棋盘格图案的一角邻近设置。
8、其中,定向标识图案设有一个或多个。
9、本发明还提出一种机械臂的手眼标定数据采集方法,该机械臂的手眼标定数据采集方法包括:
10、根据标定板建立世界坐标系,并获取标定板中棋盘格图案的所有角点在世界坐标系下的世界坐标,其中,标定板为前述记载的标定板;
11、采集标定板的图像,其中,标定板的图像中包含棋盘格图案和定向标识图案;
12、提取标定板的图像中棋盘格图案的所有角点和定向标识图案,并根据定向标识图案将标定板的图像中棋盘格图案的所有角点与标定板中棋盘格图案的所有角点一一对应;
13、根据对应结果将标定板的图像中棋盘格图案的所有角点与标定板中棋盘格图案的所有角点在世界坐标系下的世界坐标一一对应。
14、其中,提取标定板的图像中棋盘格图案的所有角点和定向标识图案,并根据定向标识图案将标定板的图像中棋盘格图案的所有角点与标定板中棋盘格图案的所有角点一一对应的步骤中包括:
15、根据标定板中棋盘格图案各角点与定向标识图案的位置关系,对棋盘格图案所有角点按照预设规则进行排序,并依次将标定板的图像中棋盘格图案的所有角点与标定板中棋盘格图案的所有角点一一对应。
16、本发明还提出一种机械臂的手眼标定方法,机械臂上设有视觉相机,标定方法包括:
17、控制机械臂依次运动至多个图像采集点位,记录在多个图像采集点位处机械臂的位置信息并在每一个图像采集点位处采用如前述记载的机械臂的手眼标定数据采集方法采集机械臂的手眼标定数据;
18、根据多组标定数据计算视觉相机的内参和外参,并结合机械臂的多个位置信息以进行机械臂的手眼标定。
19、本发明还提出一种机械臂的手眼标定数据采集装置,该机械臂的手眼标定数据采集装置包括:
20、获取模块,用于根据标定板建立世界坐标系,并获取标定板中棋盘格图案的所有角点在世界坐标系下的世界坐标,其中,标定板为权利要求前述记载的标定板;
21、采集模块,用于采集标定板的图像,其中,标定板的图像中包含棋盘格图案和定向标识图案;
22、映射模块,用于提取标定板的图像中棋盘格图案的所有角点和定向标识图案,并根据定向标识图案将标定板的图像中棋盘格图案的所有角点与标定板中棋盘格图案的所有角点一一对应;
23、转换模块,用于根据对应结果将标定板的图像中棋盘格图案的所有角点与标定板中棋盘格图案的所有角点在世界坐标系下的世界坐标一一对应。
24、本发明还提出一种机械臂的手眼标定系统,该机械臂的手眼标定系统包括:
25、机械臂;
26、标定板,标定板为如权利要求前述记载的标定板,且位于机械臂的运动空间中;
27、视觉相机,视觉相机设置在机械臂上,用于采集标定板的图像。
28、本发明还提出一种机械臂的控制设备,该机械臂的手眼标定设备包括:
29、存储器,用于存储计算机程序;
30、处理器,用于执行计算机程序时实现如前述记载的机械臂的手眼标定数据采集方法或如前述记载的机械臂的手眼标定方法。
31、本发明还提出一种计算机存储介质,计算机存储介质上存储有计算机程序,计算机程序被处理器执行时实现如前述记载的机械臂的手眼标定数据采集方法或如前述记载的机械臂的手眼标定方法。
32、本发明所涉及的标定板,可用于机械臂的手眼标定。标定板上具有棋盘格图案和定向标识图案,在机械臂手眼标定时,可将所识别的定向标识图案作为参照以进行标定板的定向,具体地,在机械臂的手眼标定过程中,机械臂通过视觉相机采集标定板的图像,所采集的标定板的图像中包含棋盘格图案和定向标识图案,可根据所识别的定向标识图案以确定标定板的原点的位置以及xyz轴方向,从而方便进一步对棋盘格图案的各角点进行排序,以完成棋盘格图案各角点的图像坐标与世界坐标一一对应,精准实现坐标转换,即可保证所检测标定板的角度与实际旋转姿态的唯一对应性。本发明通过在标定板的棋盘格图案外侧设置定向标识图案,从而赋予标定板方向性,可让不管什么棋盘格图案的标定板,均可用于机械臂的手眼标定,当然,也还可以用于机械臂的误差校正。
技术特征:
1.一种标定板,其特征在于,
2.根据权利要求1所述的标定板,其特征在于,
3.根据权利要求1所述的标定板,其特征在于,
4.根据权利要求1所述的标定板,其特征在于,
5.一种机械臂的手眼标定数据采集方法,其特征在于,包括:
6.根据权利要求5所述的机械臂的手眼标定数据采集方法,其特征在于,所述提取所述标定板的图像中所述棋盘格图案的所有角点和所述定向标识图案,并根据所述定向标识图案将所述标定板的图像中所述棋盘格图案的所有角点与所述标定板中所述棋盘格图案的所有角点一一对应的步骤中包括:
7.一种机械臂的手眼标定方法,其特征在于,所述机械臂上设有视觉相机,所述手眼标定方法包括:
8.一种机械臂的手眼标定数据采集装置,其特征在于,包括:
9.一种机械臂的手眼标定系统,其特征在于,包括:
10.一种机械臂的控制设备,其特征在于,包括:
11.一种计算机存储介质,其特征在于,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求5至6所述的机械臂的手眼标定数据采集方法或如权利要求7所述的机械臂的手眼标定方法。
技术总结
本发明公开一种标定板、机械臂的手眼标定数据采集方法及手眼标定方法,所述标定板上具有棋盘格图案和定向标识图案,所述定向标识图案间隔设置于所述棋盘格图案的外侧,所述定向标识图案用于在所述机械臂进行手眼标定时作为定向参照以供识别。本发明通过在标定板的棋盘格图案外侧设置定向标识图案,从而赋予标定板方向性,可让不管什么棋盘格图案的标定板,均可用于机械臂的手眼标定。
技术研发人员:蔡同彪,郎需林,姜宇
受保护的技术使用者:深圳市越疆科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!