一种可变长度的柔性气动软体抓手
本发明涉及机器人设备,尤其涉及一种可变长度的柔性气动软体抓手。
背景技术:
1、机器人的柔性抓取是当下机器人领域的研究热点,目的在于通过减小抓取过程中抓手与抓取对象的冲击力,柔性抓手采用柔性材料制作,可以在无需外部传感器的情况下实现对抓取对象的柔性抓取,是理想的抓手类型。然而,常见的柔性抓手的手指长度通常是固定的,具有不可调整性,抓取的对象和抓取范围相对单一,影响了抓手在实际作业中的通用性。同时,柔性抓手通常容易被尖锐的表面划伤,在运输过程中容易损坏。此外,还有一些抓手结构复杂,手指不易维修,增加了生产维护的成本。
2、因此,本领域的技术人员致力于开发一种手指长度可变的柔性气动抓手,能够根据抓取对象的尺寸大小灵活调整手指长度,以达到最佳的抓握姿态,并且手指具有成本低,易于修复的特点,能有效降低抓取作业的损耗成本。
技术实现思路
1、有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何设计一种手指长度可变的柔性气动抓手,能够根据抓取对象的尺寸大小灵活调整手指长度,以达到最佳的抓握姿态。
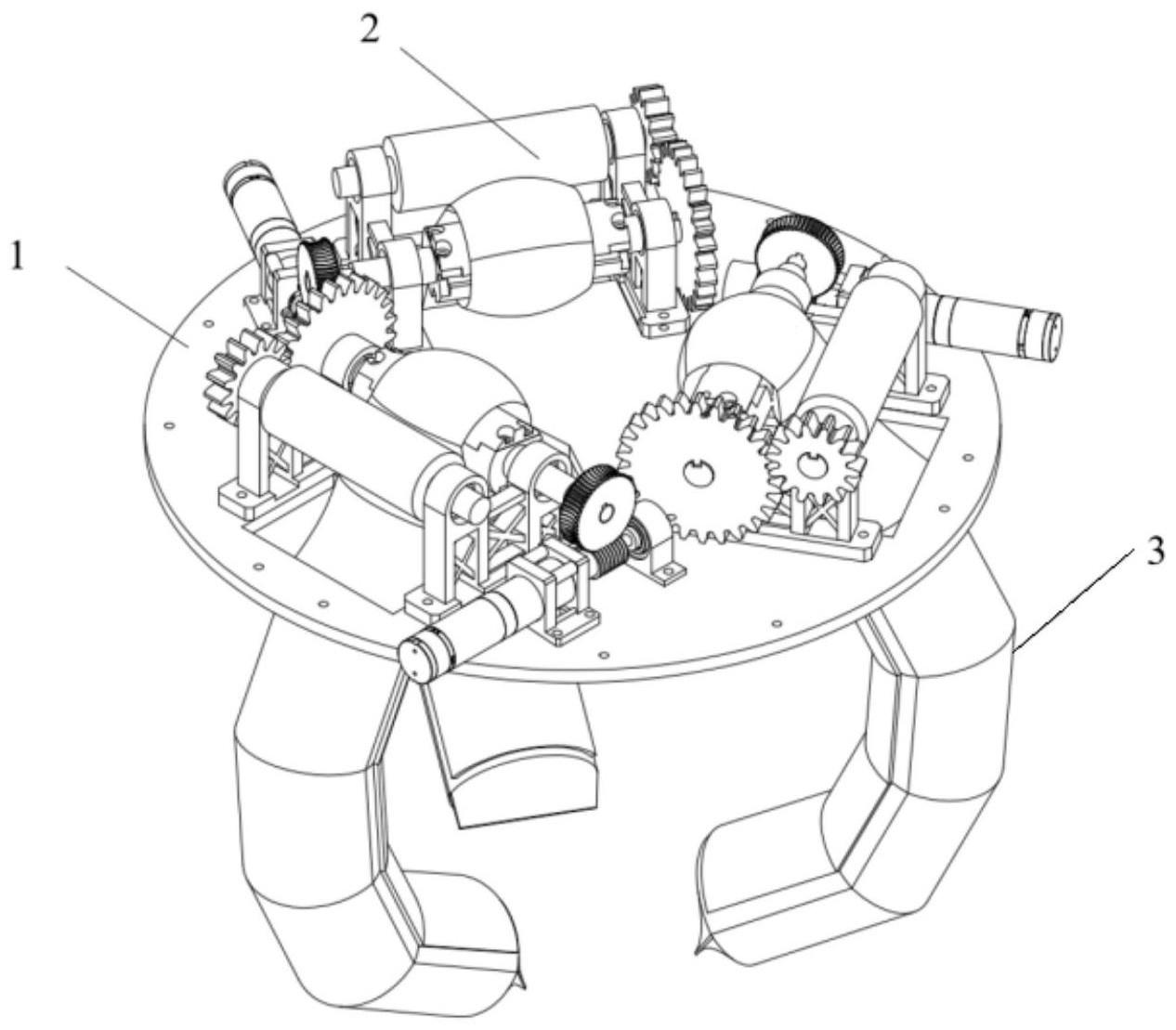
2、为实现上述目的,本发明提供了一种可变长度的柔性气动软体抓手,其特征在于,包括抓手固定平台、手指卷绕机构和柔性手指,其中,所述手指卷绕机构安装在所述抓手固定平台上,所述柔性手指安装在所述手指卷绕机构上,所述手指卷绕机构能够调整所述柔性手指的长度。
3、进一步地,所述抓手固定平台包括固定平台基体,所述固定平台基体上还有多个手指卷绕机构连接孔,所述手指卷绕机构通过所述手指卷绕机构连接孔固定在所述固定平台基体上。
4、进一步地,所述固定平台基体上还有三个均布的方形孔,所述手指卷绕机构和所述柔性手指的数量均为三个,三个所述柔性手指分别穿过三个所述方形孔。
5、进一步地,所述固定平台基体上布置有多个外部安装孔,所述外部安装孔用于让所述抓手固定平台固定在使用场所。
6、进一步地,所述手指卷绕机构包括转动支架,所述转动支架通过所述手指卷绕机构连接孔与所述固定平台基体固定连接。
7、进一步地,所述手指卷绕机构还包括电机、电机法兰、蜗杆、蜗轮、主动滚轴、从动滚轴、第一齿轮和第二齿轮,所述电机法兰固定在所述抓手固定平台上,所述主动滚轴和所述从动滚轴通过所述转动支架固定,所述电机连接在所述电机法兰上,所述电机的输出轴与所述蜗杆连接,所述蜗轮设置在所述蜗杆的上方,所述蜗轮与所述主动滚轴相连,所述第一齿轮与所述主动滚轴相连,所述第二齿轮与所述从动滚轴相连,所述第一齿轮与所述第二齿轮配合,所述柔性手指缠绕在所述主动滚轴上,所述柔性手指由所述主动滚轴和所述从动滚轴压紧。
8、进一步地,所述柔性手指包括上层弯曲腔体和下层直线腔体,所述上层弯曲腔体为弯曲形状,所述下层直线腔体为直线形状,所述上层弯曲腔体和所述下层直线腔体连接在一起。
9、进一步地,所述上层弯曲腔体和所述下层直线腔体上均设有导气孔,所述上层弯曲腔体的导气孔和所述下层直线腔体的导气孔分别与不同的气压源相连。
10、进一步地,所述上层弯曲腔体和所述下层直线腔体由柔性布料制成,所述柔性布料为两面覆盖有聚氨酯涂层的纤维布料。
11、进一步地,所述下层直线腔体的布料表面有绒毛覆盖。
12、常见的柔性抓手的手指长度通常是固定的,具有不可调整性,抓取的对象和抓取范围相对单一,影响了抓手在实际作业中的通用性。本发明提出了基于覆盖有聚氨酯薄膜的柔性布料制成的柔性气动手指,通过卷绕的方式使得手指可以改变其伸出的长度,从而调整抓手的工作空间。本发明通过设计集成有卷绕机构和柔性布料手指的三指抓手,实现了抓手手指长度变化,设计了一种手指长度可变的柔性气动抓手,能够根据抓取对象的尺寸大小灵活调整手指长度,以达到最佳的抓握姿态,从而提升了抓手在抓取作业中的通用性。
13、柔性抓手通常容易被尖锐的表面划伤,在运输过程中容易损坏。本发明采用了基于覆盖有聚氨酯薄膜的柔性布料制成的柔性气动手指,在运输过程中可以将手指完全收回基座内部,通过卷绕的方式使得手指可以进行大范围的折叠卷绕,使其得以完全收回基座内,提升了便携性,减少了运输过程中抓手损坏的风险,降低了运输成本。
14、常见的柔性抓手结构复杂,手指不易维修,增加了生产维护的成本。本发明采用的覆盖有聚氨酯薄膜的柔性布料具有易修补的特点,可以与其他聚氨酯薄膜快速粘合,柔性手指在破损后可以通过在破损区域贴聚氨酯薄膜贴纸,以实现对布料破损区域的快速修补,降低了手指修复的成本,提高了修复效率。
15、本发明采用以上技术方案,具有以下的有益效果:
16、1、柔性手指通过主动滚轴连接在手指卷绕机构上,可以通过转动主动滚轴来改变柔性手指缠绕的长度,以此改变柔性手指的有效工作长度。
17、2、柔性手指通过主动滚轴和从动滚轴压紧,保证手指长度改变过程的平顺和稳定性。
18、3、手指卷绕机构上设有的电机通过蜗杆和蜗轮传递输出力矩,可以有效的增大卷绕手指时的扭矩,并且具有自锁能力,在抓取物品时电机无需通电。
19、4、柔性手指可以通过对上层弯曲腔体和下层直线腔体分别加压实现柔性手指的弯曲和伸直运动。
20、5、柔性手指采用聚氨酯涂层布料制作,可以通过聚氨酯薄膜修补贴对破损的结构进行快速修补,无需拆卸,可以实现低成本的快速维护。
21、6、在运输过程中,柔性手指可以弯曲卷绕收回基座内,降低运输过程中损坏的风险。
22、以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
技术特征:
1.一种可变长度的柔性气动软体抓手,其特征在于,包括抓手固定平台、手指卷绕机构和柔性手指,其中,所述手指卷绕机构安装在所述抓手固定平台上,所述柔性手指安装在所述手指卷绕机构上,所述手指卷绕机构能够调整所述柔性手指的长度。
2.如权利要求1所述的一种可变长度的柔性气动软体抓手,其特征在于,所述抓手固定平台包括固定平台基体,所述固定平台基体上还有多个手指卷绕机构连接孔,所述手指卷绕机构通过所述手指卷绕机构连接孔固定在所述固定平台基体上。
3.如权利要求2所述的一种可变长度的柔性气动软体抓手,其特征在于,所述固定平台基体上还有三个均布的方形孔,所述手指卷绕机构和所述柔性手指的数量均为三个,三个所述柔性手指分别穿过三个所述方形孔。
4.如权利要求2所述的一种可变长度的柔性气动软体抓手,其特征在于,所述固定平台基体上布置有多个外部安装孔,所述外部安装孔用于让所述抓手固定平台固定在使用场所。
5.如权利要求2所述的一种可变长度的柔性气动软体抓手,其特征在于,所述手指卷绕机构包括转动支架,所述转动支架通过所述手指卷绕机构连接孔与所述固定平台基体固定连接。
6.如权利要求5所述的一种可变长度的柔性气动软体抓手,其特征在于,所述手指卷绕机构还包括电机、电机法兰、蜗杆、蜗轮、主动滚轴、从动滚轴、第一齿轮和第二齿轮,所述电机法兰固定在所述抓手固定平台上,所述主动滚轴和所述从动滚轴通过所述转动支架固定,所述电机连接在所述电机法兰上,所述电机的输出轴与所述蜗杆连接,所述蜗轮设置在所述蜗杆的上方,所述蜗轮与所述主动滚轴相连,所述第一齿轮与所述主动滚轴相连,所述第二齿轮与所述从动滚轴相连,所述第一齿轮与所述第二齿轮配合,所述柔性手指缠绕在所述主动滚轴上,所述柔性手指由所述主动滚轴和所述从动滚轴压紧。
7.如权利要求1所述的一种可变长度的柔性气动软体抓手,其特征在于,所述柔性手指包括上层弯曲腔体和下层直线腔体,所述上层弯曲腔体为弯曲形状,所述下层直线腔体为直线形状,所述上层弯曲腔体和所述下层直线腔体连接在一起。
8.如权利要求7所述的一种可变长度的柔性气动软体抓手,其特征在于,所述上层弯曲腔体和所述下层直线腔体上均设有导气孔,所述上层弯曲腔体的导气孔和所述下层直线腔体的导气孔分别与不同的气压源相连。
9.如权利要求7所述的一种可变长度的柔性气动软体抓手,其特征在于,所述上层弯曲腔体和所述下层直线腔体由柔性布料制成,所述柔性布料为两面覆盖有聚氨酯涂层的纤维布料。
10.如权利要求7所述的一种可变长度的柔性气动软体抓手,其特征在于,所述下层直线腔体的布料表面有绒毛覆盖。
技术总结
本发明公开了一种可变长度的柔性气动软体抓手,涉及机器人设备技术领域,其特征在于,包括抓手固定平台、手指卷绕机构和柔性手指,其中,所述手指卷绕机构安装在所述抓手固定平台上,所述柔性手指安装在所述手指卷绕机构上,所述手指卷绕机构能够调整所述柔性手指的长度。本发明提供了一种手指长度可变的柔性气动抓手,能够根据抓取对象的尺寸大小灵活调整手指长度,以达到最佳的抓握姿态,并且手指具有成本低,易于修复的特点,能有效降低抓取作业的损耗成本。
技术研发人员:陈根良,龙泳舟,王皓,姜汉卿,张壮
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!