一种可穿戴轻型上肢助力臂外骨骼机器人的制作方法
本发明涉及机器人,特别涉及一种可穿戴轻型上肢助力臂外骨骼机器人。
背景技术:
1、
2、电网运维工作人员在10kv-500kv变电站运维人员装拆接地线及验电作业,是一件劳动强度和操作难度都很大的工作。现有的外骨骼机器人在使用时,没有针对电网运维人员在工作中触电的情况进行相应的操作,使用不方便,因此,我们公开了一种可穿戴轻型上肢助力臂外骨骼机器人来满足人们的需求。
技术实现思路
1、本申请的目的在于提供一种可穿戴轻型上肢助力臂外骨骼机器人,以解决上述背景技术中提出的现有的外骨骼机器人在使用时,没有针对电网运维人员在工作中触电的情况进行相应的操作,使用不方便的问题。
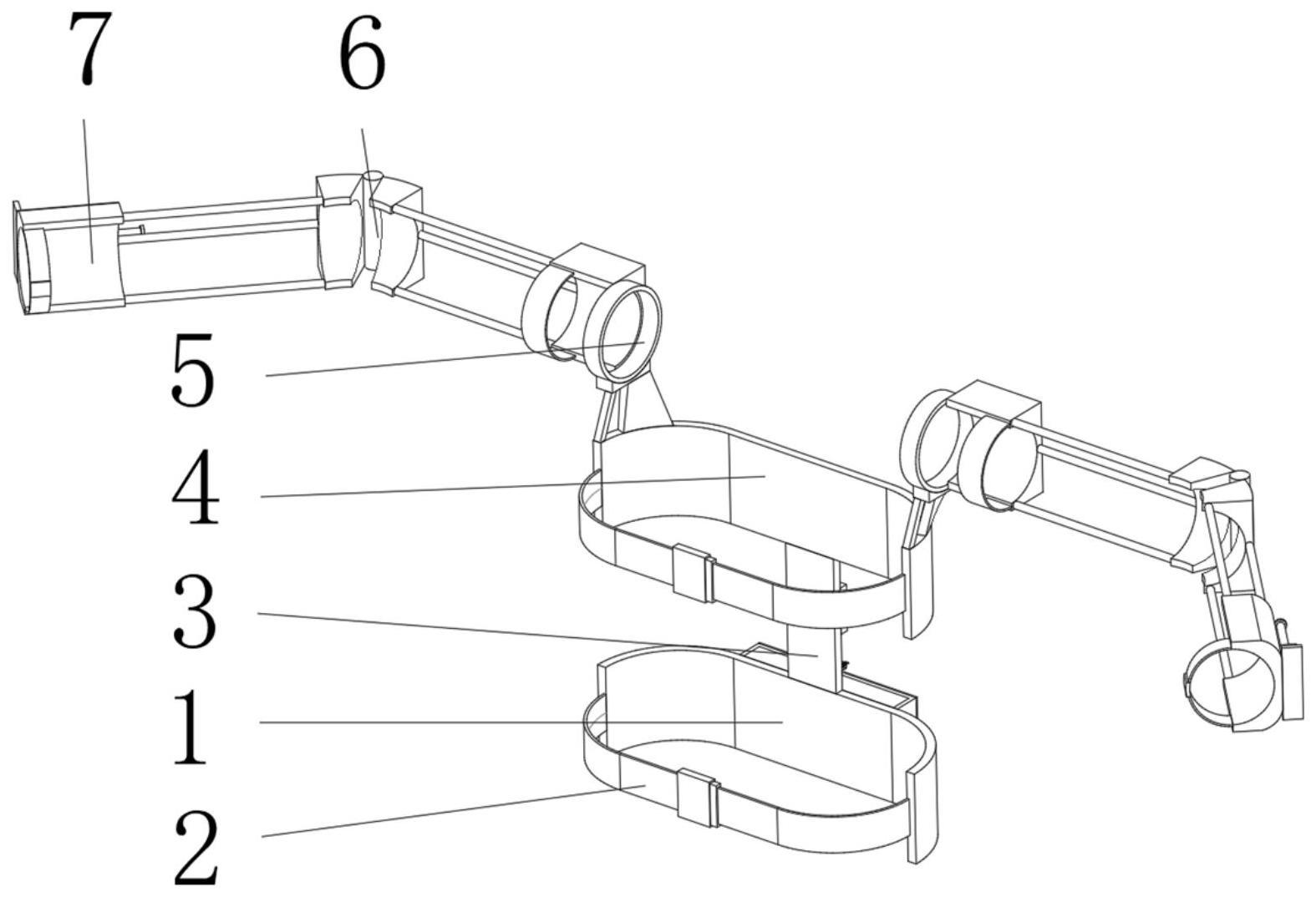
2、为实现上述目的,本申请提供如下技术方案:一种可穿戴轻型上肢助力臂外骨骼机器人,包括第一穿戴块,所述第一穿戴块的顶部安装有连接块,所述连接块的顶部安装有第二穿戴块,所述第一穿戴块与所述第二穿戴块的两端均安装有固定带,两个相对应的所述固定带上均安装有卡住组件,所述第二穿戴块的顶部对称安装有两个固定块,两个固定块相互远离的一侧均转动安装有机械臂,两个所述机械臂的一端均安装有安装块,两个所述安装块的一侧均安装有固定板,两个所述固定板的一侧均开设有圆通孔,两个所述圆通孔内均滑动安装有滑动杆,两个所述滑动杆的一端均贯穿所述圆通孔并安装有推动块,两个所述安装块的一侧均安装有松紧带,两个所述松紧带上均安装有电流电压检测器,所述滑动杆上安装有推动组件,所述第一穿戴块上安装有电池组件,所述连接块上安装有控制组件。
3、进一步的,在使用时,如果工作人员触电,电流电压检测器检测到电流电压过大后,将信号传递给控制组件,控制组件控制滑动杆带动推动块移动,推动块将前方线缆推动,使得工作人员的手与线缆不接触,同时机械臂带动工作人员手臂收缩,使用起来更加的安全可靠,实用性好。
4、优选的,所述卡住组件包括卡扣盒,所述卡扣盒安装于其中一个所述固定带的一端,另一个所述固定带的一端安装有与所述卡扣盒相适配的卡住扣。
5、进一步的,通过卡扣盒的设置,在卡住扣的配合下,方便穿戴机械臂,穿戴起来更加的简单方便,实用性好。
6、优选的,所述推动组件包括推出弹簧,所述推出弹簧套设于所述滑动杆上,所述滑动杆的外周侧上套接安装有挡块,所述推出弹簧的一端与所述挡块的一侧相连接,所述推出弹簧的另一端与所述固定板的一侧相连接,所述滑动杆上安装有限位单元,所述安装块上安装有挡住组件。
7、进一步的,通过推出弹簧的设置,当工作人员触电,电流电压检测器检测到电流电压过大后,通过控制组件,使得在推出弹簧的弹力作用下,滑动杆带动推动块移动,推动块将前方线缆推动,使得工作人员的手与线缆不接触,同时机械臂带动工作人员手臂收缩,使用起来更加的安全可靠。
8、优选的,所述限位单元包括防脱帽,所述防脱帽安装于所述滑动杆的一端。
9、进一步的,通过防脱帽的设置,在滑动杆滑动时,在防脱帽的作用下,使得滑动杆滑动的距离得到限制,使用起来更加的简单方便,实用性好。
10、优选的,所述挡住组件包括l形卡块,所述安装块的一侧安装有电机,所述电机的输出轴上安装有螺纹杆,所述l形卡块螺纹安装于所述螺纹杆上,所述l形卡块的一侧与所述挡块的一侧相接触。
11、进一步的,通过l形卡块的设置,在需要对挡块解除锁定时,电机启动,带动螺纹杆转动,螺纹杆转动带动l形卡块移动,对挡块解除锁定,使用起来更加的方便。
12、优选的,所述电池组件包括三元锂离子电池,所述第一穿戴块的一侧安装有电池盒,所述三元锂离子电池滑动安装于所述电池盒内,所述电池盒上安装有发电单元,所述电池盒上安装有锁定组件。
13、进一步的,通过三元锂离子电池的设置,在电池盒的配合下,可以方便给机械臂进行供电,使用起来更加的简单方便。
14、优选的,所述发电单元包括太阳能充电板,所述太阳能充电板安装于所述电池盒的一侧。
15、进一步的,通过太阳能充电板的设置,在使用过程中,太阳能充电板可以持续为三元锂离子电池进行充电,使用起来更加的方便。
16、优选的,所述锁定组件包括限位块,所述三元锂离子电池的顶部安装有u形块,所述限位块滑动安装于所述u形块内,所述限位块的一侧安装有挡住块,所述太阳能充电板的一侧安装有l形块,所述l形块的一侧开设有滑动通孔,所述滑动通孔内滑动安装有圆杆,所述圆杆的一端贯穿所述滑动通孔并与所述挡住块的一侧相连接,所述圆杆的另一端安装有拉片,所述挡住块上安装有复位单元。
17、进一步的,通过限位块的设置,在u形块、挡住块、圆杆和l形块的配合下,对三元锂离子电池进行位置限定,方便使用。
18、优选的,所述复位单元包括复位弹簧,所述复位弹簧套设于所述圆杆上,所述复位弹簧的一端与所述挡住块的一侧相连接,所述复位弹簧的另一端与所述l形块的一侧相连接。
19、进一步的,通过复位弹簧的设置,松开拉片,在复位弹簧的弹力作用下,限位块向u形块移动并插入其中,将三元锂离子电池锁定住,使用方便。
20、优选的,所述控制组件包括控制器,所述控制器安装于所述连接块的一侧。
21、进一步的,通过控制器的设置,方便对机械臂进行控制,使用方便。
22、综上,本发明的技术效果和优点:
23、1、本发明中,如果工作人员触电,电流电压检测器检测到电流电压过大后,将信号传递给控制器,控制器使得电机启动,带动螺纹杆转动,螺纹杆转动带动l形卡块移动,对挡块解除锁定,在推出弹簧的弹力作用下,滑动杆带动推动块移动,推动块将前方线缆推动,使得工作人员的手与线缆不接触,同时机械臂带动工作人员手臂收缩,使用起来更加的安全可靠,实用性好。
24、2、本发明中,在使用时,将卡扣盒与卡住扣打开,将机械臂穿戴好,将卡扣盒与卡住扣关闭,通过采集、分析和处理机械臂上的位置传感器、交互力传感器和倾角传感器等信息,将融合处理得到的人体运动意图、状态及疲劳程度输出到控制器,基于感知人体运动意图、状态及疲劳程度,控制器进行人机协调的搬运动作助力控制,通过控制机械臂运动,帮助工作人员进行作业,减轻工作人员体力损耗和重复的肌腱劳损,使用起来更加的简单方便,实用性好。
25、3、本发明中,当需要更换三元锂离子电池时,拉动拉片,带动圆杆移动,通过挡住块带动限位块移动,对三元锂离子电池解除锁定,将三元锂离子电池从电池盒中取出,放入新的三元锂离子电池,松开拉片,在复位弹簧的弹力作用下,限位块向u形块移动并插入其中,将三元锂离子电池锁定住,使用起来更加的简单,在使用过程中,太阳能充电板也可以给三元锂离子电池进行充电,使用方便,实用性好。
技术特征:
1.一种可穿戴轻型上肢助力臂外骨骼机器人,包括第一穿戴块(1),其特征在于:所述第一穿戴块(1)的顶部安装有连接块(3),所述连接块(3)的顶部安装有第二穿戴块(4),所述第一穿戴块(1)与所述第二穿戴块(4)的两端均安装有固定带(2),两个相对应的所述固定带(2)上均安装有卡住组件,所述第二穿戴块(4)的顶部对称安装有两个固定块(5),两个固定块(5)相互远离的一侧均转动安装有机械臂(6),两个所述机械臂(6)的一端均安装有安装块(7),两个所述安装块(7)的一侧均安装有固定板(18),两个所述固定板(18)的一侧均开设有圆通孔,两个所述圆通孔内均滑动安装有滑动杆(19),两个所述滑动杆(19)的一端均贯穿所述圆通孔并安装有推动块(12),两个所述安装块(7)的一侧均安装有松紧带(21),两个所述松紧带(21)上均安装有电流电压检测器(22),所述滑动杆(19)上安装有推动组件,所述第一穿戴块(1)上安装有电池组件,所述连接块(3)上安装有控制组件。
2.根据权利要求1所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述卡住组件包括卡扣盒(23),所述卡扣盒(23)安装于其中一个所述固定带(2)的一端,另一个所述固定带(2)的一端安装有与所述卡扣盒(23)相适配的卡住扣(24)。
3.根据权利要求1所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述推动组件包括推出弹簧(17),所述推出弹簧(17)套设于所述滑动杆(19)上,所述滑动杆(19)的外周侧上套接安装有挡块(16),所述推出弹簧(17)的一端与所述挡块(16)的一侧相连接,所述推出弹簧(17)的另一端与所述固定板(18)的一侧相连接,所述滑动杆(19)上安装有限位单元,所述安装块(7)上安装有挡住组件。
4.根据权利要求3所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述限位单元包括防脱帽(20),所述防脱帽(20)安装于所述滑动杆(19)的一端。
5.根据权利要求3所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述挡住组件包括l形卡块(15),所述安装块(7)的一侧安装有电机(13),所述电机(13)的输出轴上安装有螺纹杆(14),所述l形卡块(15)螺纹安装于所述螺纹杆(14)上,所述l形卡块(15)的一侧与所述挡块(16)的一侧相接触。
6.根据权利要求1所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述电池组件包括三元锂离子电池(11),所述第一穿戴块(1)的一侧安装有电池盒(10),所述三元锂离子电池(11)滑动安装于所述电池盒(10)内,所述电池盒(10)上安装有发电单元,所述电池盒(10)上安装有锁定组件。
7.根据权利要求6所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述发电单元包括太阳能充电板(9),所述太阳能充电板(9)安装于所述电池盒(10)的一侧。
8.根据权利要求1所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述锁定组件包括限位块(26),所述三元锂离子电池(11)的顶部安装有u形块(25),所述限位块(26)滑动安装于所述u形块(25)内,所述限位块(26)的一侧安装有挡住块(27),所述太阳能充电板(9)的一侧安装有l形块(31),所述l形块(31)的一侧开设有滑动通孔,所述滑动通孔内滑动安装有圆杆(28),所述圆杆(28)的一端贯穿所述滑动通孔并与所述挡住块(27)的一侧相连接,所述圆杆(28)的另一端安装有拉片(30),所述挡住块(27)上安装有复位单元。
9.根据权利要求8所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述复位单元包括复位弹簧(29),所述复位弹簧(29)套设于所述圆杆(28)上,所述复位弹簧(29)的一端与所述挡住块(27)的一侧相连接,所述复位弹簧(29)的另一端与所述l形块(31)的一侧相连接。
10.根据权利要求1所述的一种可穿戴轻型上肢助力臂外骨骼机器人,其特征在于:所述控制组件包括控制器(8),所述控制器(8)安装于所述连接块(3)的一侧。
技术总结
本发明公开了—种可穿戴轻型上肢助力臂外骨骼机器人,涉及到机器人技术领域,包括第一穿戴块,所述第一穿戴块的顶部安装有连接块,所述连接块的顶部安装有第二穿戴块,所述第一穿戴块与所述第二穿戴块的两端均安装有固定带,两个相对应的所述固定带上均安装有卡住组件,所述第二穿戴块的顶部对称安装有两个固定块,两个固定块相互远离的一侧均转动安装有机械臂。本发明中,如果工作人员触电,电流电压检测器检测到电流电压过大后,将信号传递给控制器,控制器使得电机启动,带动螺纹杆转动,螺纹杆转动带动L形卡块移动,对挡块解除锁定,在推出弹簧的弹力作用下,滑动杆带动推动块移动,推动块将前方线缆推动,使得工作人员的手与线缆不接触。
技术研发人员:聂波,马云明,王建平,刘劲,李鹏程,宋兴贵
受保护的技术使用者:昆明东电科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!