机器人的负载平衡方法、装置、负载机器人及介质与流程
本发明涉及机器人领域,尤其涉及一种机器人的负载平衡方法、装置、设备及介质。
背景技术:
1、现有的机器人电机的电流调节的算法一般是通过陀螺仪、重力感应器获取平衡数据,以此确定机器人的平衡状态,再根据这些数据按照已有的算法去调节电流,保持平衡。
2、然而根据陀螺仪或者重力感应器来帮助机器人保持平衡的技术中一般只能获取单个机器人的平衡状态,在机器人上携带负载并且负载位置不在中心时,甚至负载位置随着运动而滚动、移动时,想保持负载稳定的放置在负载平面上是特别难解决的问题。因此,为了通过调节负载的位置使负载在机器人上保持稳定,现在亟需一种机器人的负载平衡方法。
技术实现思路
1、本发明提供一种机器人的负载平衡方法、装置、设备及介质,其主要目的在于提升机器人上负载的平衡状态。
2、为实现上述目的,本发明提供的一种机器人的负载平衡方法,包括:
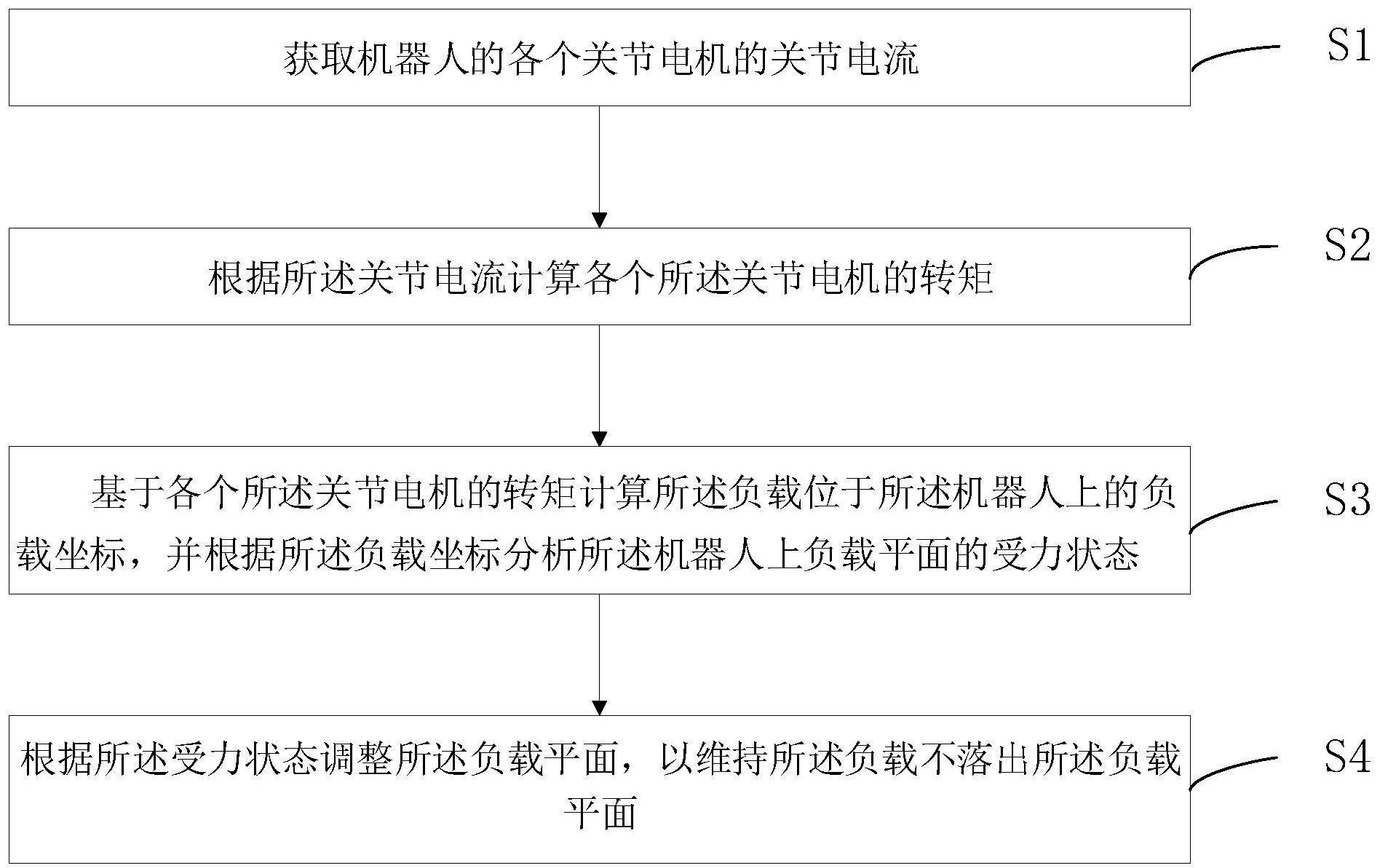
3、获取机器人的各个关节电机的关节电流;
4、根据所述关节电流计算各个所述关节电机的转矩;
5、基于各个所述关节电机的转矩计算所述负载位于所述机器人上的负载坐标,并根据所述负载坐标分析所述机器人上负载平面的受力状态;
6、根据所述受力状态调整所述负载平面,以维持所述负载不落出所述负载平面。
7、可选地,所述基于各个所述关节电机的转矩计算所述负载位于所述机器人上的负载坐标,包括:
8、根据各个所述关节电机的转矩得到左髋部电机转矩、右髋部电机转矩、左膝部电机转矩和右膝部电机转矩;
9、获取所述关节电机的角度和惯性测量单元的角度,并根据所述关节电机的角度和所述惯性测量单元的角度测得所述机器人的俯仰角和滚转角;
10、基于所述关节电机的角度和关节电机之间的连杆长度得到雅各比矩阵,并根据所述雅各比矩阵、所述左膝部电机转矩和所述右膝部电机转矩计算所述机器人的左髋部支撑力和右髋部支撑力;
11、根据所述左髋部支撑力、所述右髋部支撑力、所述滚转角和所述机器人的质量计算出所述负载的质量;
12、根据所述机器人的基本参数、所述俯仰角、所述负载的质量、所述左髋部电机转矩和所述右髋部电机转矩计算所述负载的x坐标和y坐标,得到所述负载位于所述机器人上的负载坐标。
13、可选地,所述根据所述左髋部支撑力、所述右髋部支撑力、所述滚转角和所述机器人的质量计算出所述负载的质量,包括:
14、利用下述公式计算所述负载的质量:
15、
16、其中,m为所述负载的质量,m为所述机器人的质量,flknee和frknee分别为所述左髋部支撑力和所述右髋部支撑力,γ为所述机器人的滚转角。
17、可选地,所述根据所述机器人的基本参数、所述俯仰角、所述负载的质量、所述左髋部电机转矩和所述右髋部电机转矩计算所述负载的x坐标和y坐标,得到所述负载位于所述机器人上的负载坐标,包括:
18、根据所述机器人的基本参数获取所述机器人主体的主体宽度;
19、根据所述负载的质量、所述俯仰角、所述左髋部电机转矩、所述右髋部电机转矩和预设的x坐标计算公式计算出所述负载的x坐标;
20、根据所述主体宽度、所述左髋部支撑力、所述右髋部支撑力和预设的y坐标计算公式计算出所述负载的y坐标,并根据所述负载的x坐标和y坐标得到所述负载坐标。
21、可选地,所述x坐标计算公式和所述y坐标计算公式分别为:
22、
23、
24、其中,ly为所述主体宽度,m为所述负载的质量,tlhip和trhip分别为所述左髋部电机转矩及所述右髋部电机转矩,θ为所述俯仰角,flknee和frknee分别为所述左髋部支撑力和所述右髋部支撑力。
25、可选地,所述根据所述负载坐标分析所述机器人上负载平面的受力状态,包括:
26、根据所述负载的质量和所述负载坐标获取所述负载平面受到的负载压力;
27、根据各个所述关节电机的转矩计算的左髋部支撑力和右髋部支撑力获取所述负载平面受到的电机支撑力,并根据所述负载压力和所述电机支撑力得到所述负载平面的受力状态。
28、可选地,所述根据所述受力状态调整所述负载平面,以维持所述负载不落出所述负载平面,包括:
29、根据所述受力状态调整所述关节电机的电角度,改变所述负载位于所述机器人上的负载坐标,维持所述负载不落出所述负载平面。
30、可选地,所述基于各个所述关节电机的转矩计算所述负载位于所述机器人上的负载坐标之前,所述方法还包括:
31、当检测到所述关节电机因外力产生预设电流变化时,判定存在负载对所述机器人施加压力。
32、为了解决上述问题,本发明还提供一种机器人的负载平衡装置,所述装置包括:
33、关节电流获取模块,用于获取机器人的各个关节电机的关节电流;
34、电机转矩计算模块,用于根据所述关节电流计算各个所述关节电机的转矩;
35、负载坐标获取模块,用于基于各个所述关节电机的转矩计算所述负载位于所述机器人上的负载坐标,并根据所述负载坐标分析所述机器人上负载平面的受力状态;
36、机器人平衡模块,用于根据所述受力状态调整所述负载平面,以维持所述负载不落出所述负载平面。
37、为了解决上述问题,本发明还提供一种负载机器人,所述负载机器人包括:
38、至少一个处理器;以及,
39、与所述至少一个处理器通信连接的存储器;其中,
40、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上所述的机器人的负载平衡方法。
41、为了解决上述问题,本发明还提供一种计算机可读存储介质,包括存储数据区和存储程序区,存储数据区存储创建的数据,存储程序区存储有计算机程序;其中,所述计算机程序被处理器执行时实现如上所述的机器人的负载平衡方法。
42、本发明实施例中,首先根据关节电流计算关节电机的转矩,实现获取关节电机的转矩的目的,然后基于各个关节电机的转矩计算负载位于机器人上的负载坐标,根据负载坐标分析机器人上负载平面的受力状态,最后根据受力状态调整负载平面,以维持负载不落出所述负载平面,因此本发明提出的机器人的负载平衡方法、装置、电子设备及计算机可读存储介质,可以实现提升机器人上负载的平衡状态的目的。
技术特征:
1.一种机器人的负载平衡方法,其特征在于,所述方法包括:
2.如权利要求1所述的机器人的负载平衡方法,其特征在于,所述基于各个所述关节电机的转矩计算所述负载位于所述机器人上的负载坐标,包括:
3.如权利要求2所述的机器人的负载平衡方法,其特征在于,所述根据所述左髋部支撑力、所述右髋部支撑力、所述滚转角和所述机器人的质量计算出所述负载的质量,包括:
4.如权利要求2所述的机器人的负载平衡方法,其特征在于,所述根据所述机器人的基本参数、所述俯仰角、所述负载的质量、所述左髋部电机转矩和所述右髋部电机转矩计算所述负载的x坐标和y坐标,得到所述负载位于所述机器人上的负载坐标,包括:
5.如权利要求4所述的机器人的负载平衡方法,其特征在于,所述x坐标计算公式和所述y坐标计算公式分别为:
6.如权利要求1所述的机器人的负载平衡方法,其特征在于,所述根据所述负载坐标分析所述机器人上负载平面的受力状态,包括:
7.如权利要求1所述的机器人的负载平衡方法,其特征在于,所述根据所述受力状态调整所述负载平面,以维持所述负载不落出所述负载平面,包括:
8.如权利要求1所述的机器人的负载平衡方法,其特征在于,所述基于各个所述关节电机的转矩计算所述负载位于所述机器人上的负载坐标之前,所述方法还包括:
9.一种机器人的负载平衡装置,其特征在于,所述装置包括:
10.一种负载机器人,其特征在于,所述负载机器人包括:
11.一种计算机可读存储介质,包括存储数据区和存储程序区,存储数据区存储创建的数据,存储程序区存储有计算机程序;其中,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的机器人的负载平衡方法。
技术总结
本发明涉及机器人领域,揭露一种机器人的负载平衡方法,包括获取机器人的各个关节电机的关节电流;根据关节电流计算各个关节电机的转矩;基于各个关节电机的转矩计算负载位于机器人上的负载坐标,并根据负载坐标分析机器人上负载平面的受力状态;根据受力状态调整负载平面,以维持负载不落出负载平面。本发明还提出一种机器人的负载平衡装置、设备及存储介质。本发明可以提升机器人上负载的平衡状态。
技术研发人员:张笛,郁亚南,廖铉泓
受保护的技术使用者:东莞市本末科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!