一种具有空间非对称特征的CPG相位振荡器模型
本发明涉及仿生机器人运动控制,具体地说,涉及一种具有空间非对称特征的cpg相位振荡器模型及其应用。
背景技术:
1、随着机器人技术的不断发展,仿生机器人的应用领域也越来越广。仿生机器人具有较强的环境适应能力,在资源勘探等领域具有广阔的应用前景,而贴近生物的运动控制信号对仿生机器人高动态运动能力的提升具有重要意义。
2、在仿生机器人的运动控制方面,受生物学神经系统启发,中央模式发生器(central pattern generator,cpg)被用于控制仿生机器人完成基本运动。cpg控制方法具有较强鲁棒性,在对其模型参数进行修改时,控制信号可实现顺滑过渡。仿生机器人常采用相位振荡器模型来模拟每个对应结构的节律运动,其中,相位振荡器的优点在于其具有稳定的状态输出,并且可以以任意状态开始输出,而且最终状态输出都会稳定到极限环上。相位振荡器模型形式简单,而且控制参数的物理意义很明确,既能控制输出幅值,又能控制各单元间的相位差,很好的满足了机器人应用方面的需求。然而在实际应用中,在需要仿生机器人相应结构进行空间非对称运动时,相位振荡器却无法输出空间非对称信号,影响了仿生机器人运动的多样性,增加了仿生机器人运动控制的难度。故采用传统的cpg相位振荡器模型难以实现仿生机器人的精确运动控制,需要设计一种新的cpg相位振荡器模型。
技术实现思路
1、为了避免现有技术的不足之处,实现仿生机器人的运动控制仿生,本发明提出一种具有空间非对称特征的cpg相位振荡器模型。该方法的特点是:针对仿生机器人,通过建立具有空间非对称特征的cpg相位振荡器模型,产生具有空间非对称特征的节律信号,实现相位振荡器对应机构的控制,进而实现仿生机器人的运动控制。
2、为达到上述目的,本发明采用的技术方案是通过引入振幅偏置和空间非对称系数实现空间非对称特征;构建具有空间非对称性特征的cpg模型;由cpg控制器输出空间非对称的类正弦信号控制相位振荡器对应机构,从而实现仿生机器人的运动控制。
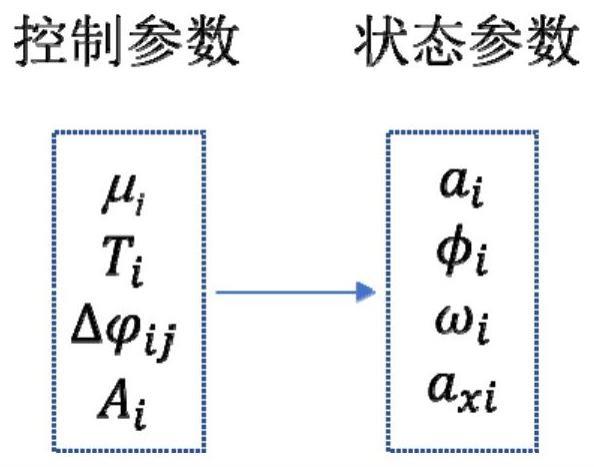
3、本发明利用具有空间非对称性特征的cpg相位振荡器模型来实现运动控制,其原理图如图1所示,所采用的技术方案包括:
4、1.传统的相位振荡器模型如下,其输出的信号是对称的余弦信号,无法实现空间非对称的类正弦信号输出:
5、
6、其中,第一个方程为振幅方程,ai表示幅值,γi表示控制振幅收敛速度的正常数,ai表示期望振幅;第二个方程为相位方程,φi表示第i个单元的相位,fi表示固有频率,ωij表示第j个单元对第i个单元的耦合权重,表示期望相位差;第三个方程为输出方程,θi表示输出值。其中ai、γi、φi、ωij为状态参数,ai、fi、为输入的控制参数。
7、2.通过引入振幅偏置来实现空间非对称特征。构建振幅偏置方程,表达为:
8、
9、其中,axi表示振幅偏置,bi表示偏置收敛系数,空间非对称系数ai≠0,表示为期望偏置与期望振幅的比值,axi表示期望偏置。
10、3.将带有空间非对称系数μi的偏置方程引入传统的cpg相位振荡器模型中,得到改进后具有空间非对称特性的cpg相位振荡器模型为:
11、
12、4.控制系统通过改变空间非对称系数μi来改变偏置;通过改变第i、j个cpg相位振荡器之间的期望相位差来改变第i、j个cpg单元间的相位关系;通过改变ai来改变振幅;通过改变cpg单元间的相位关系、振幅、频率、偏置以及耦合权重,经过方程运算可改变各cpg单元的输出,进而实现各cpg单元对应机构的控制,由此实现仿生机器人的仿生运动控制。
13、与现有技术相比,本发明具有以下有益的技术效果:
14、本发明设计了一种具有空间非对称特征的cpg相位振荡器模型,实现了空间非对称的类正弦信号输出,该输出响应迅速且能够平滑变化。
15、1.生物运动时为了实现运动效率的最大化,各运动结构在空间上往往是不完全对称的,采用传统的cpg相位振荡器无法实现实空间非对称的类正弦信号输出。本发明能够实现空间非对称的类正弦信号输出,有利于实现仿生机器人的仿生运动控制,便于提高运动效率;
16、2.定义了空间非对称系数μi,该系数只与期望偏置和期望振幅相关,在期望振幅确定的情况下,改变μi能够单独控制输出信号的偏置;
17、3.通过改变空间非对称系数μi来改变偏置,可实现输出信号由空间对称性到空间非对称性的快速平稳过渡。
技术特征:
1.一种具有空间非对称特征的cpg相位振荡器模型,其特征在于,模型为:
2.如权利要求1所述具有空间非对称特征的cpg相位振荡器模型在仿生机器人仿生运动控制中的应用,其特征在于,控制系统通过改变空间非对称系数μi来改变偏置;通过改变第i、j个cpg相位振荡器之间的期望相位差来改变第i、j个cpg单元间的相位关系;通过改变ai来改变振幅;通过改变cpg单元间的相位关系、振幅、频率、偏置以及耦合权重,经过方程运算可改变各cpg单元的输出,进而实现各cpg单元对应机构的控制,由此实现仿生机器人的仿生运动控制。
技术总结
本发明公开了一种具有空间非对称特征的CPG相位振荡器模型,通过改进传统的CPG相位振荡器模型,将带有空间非对称系数的振幅偏置方程引入其中,使其具有空间非对称特征。与现有技术相比,本发明构建的CPG相位振荡器模型可方便地输出空间非对称信号,实现空间非对称的类正弦信号输出,通过改变方程中的空间非对称系数能够单独控制输出信号的偏置,用于实现仿生机器人的空间非对称性运动,具有计算简单、控制方便、信号切换快速且平滑的特点。
技术研发人员:曹勇,路阳,郝艺伟,谢钰,马淑敏,张代利,曹永辉,潘光
受保护的技术使用者:西北工业大学宁波研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!