一种处置机器人系统的控制方案
本发明涉及核环境下特种机器人控制领域,尤其是一种处置机器人系统的控制方案。
背景技术:
1、在核安全领域中,一旦放射源失控将造成严重后果。直接让人工接触放射源进行处置工作会对工作人员的生命健康造成严重危害,而采用传统的控制方案对处置机器人系统的控制精度和控制效率很难达到要求,并且程序复杂,容易产生软件漏洞。
2、本发明实施例的目的在于提供一种处置机器人系统的控制方案,旨在减低人与放射源直接接触的可能性,简化传统的处置机器人系统的控制方案,从而提高对处置机器人系统的控制效率,减低人工学习和使用成本。
技术实现思路
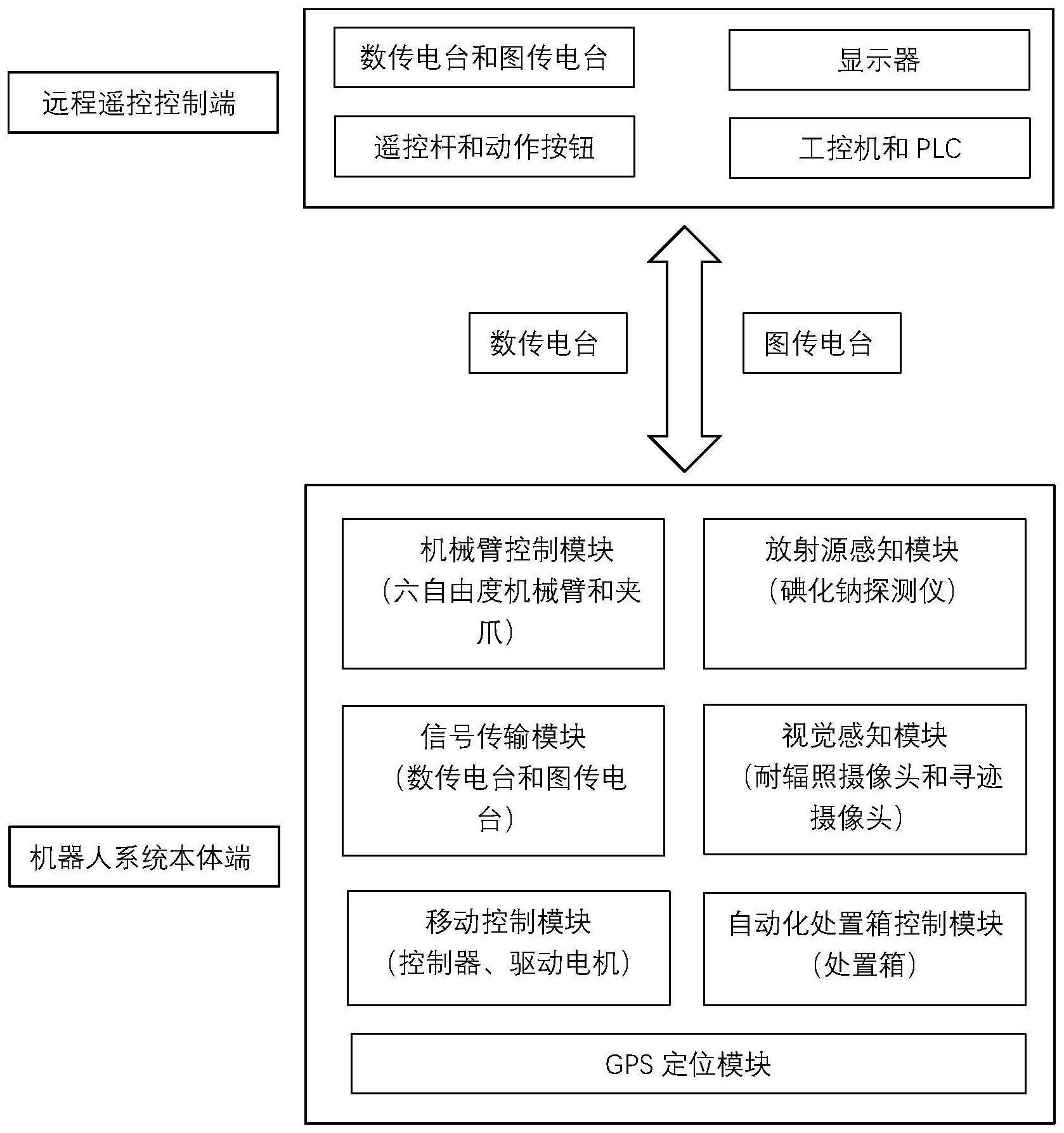
1、本发明技术所采用的技术方案为一种处置机器人系统的控制方案,包括远程遥控控制端和机器人系统本体端,远程遥控控制端和机器人系统本体端远程遥控连接,机器人系统本体端为放射源搜寻机器人和放射源收储机器人;所述的远程遥控控制端用于控制机器人对放射源的搜寻、机器人的底盘运动、机械臂的运动以及处置箱箱门的开关,所述的远程遥控控制端包括用于接收和传输信号的数传电台和图传电台,用于显示图像信号的显示器;所述机器人系统本体端包括用于控制机械臂的机械臂控制模块,用于控制处置箱的自动化处置箱控制模块,用于采集图像信息的视觉感知模块,用于获取放射源射线强度和能量数值的放射源感知模块,用于控制信号和图像信息传输的信号传输模块,用于控制运动底盘的移动控制模块,用于确定两个机器人各自位置的gps定位模块。
2、进一步地,由机械臂控制模块控制的机械臂包括六自由度机械臂和夹爪;六自由度机械臂主要包括移动关节和关节驱动电机,实现六自由度机械臂的多自由度运动;夹爪包括刚性部分和柔性部分,刚性部分包括刚性爪和驱动电机,柔性部分包括夹爪上的力反馈系统,实现对放射源的柔性夹取。
3、进一步地,由自动化处置箱控制模块控制的处置箱包括导轨、丝杆、箱门和驱动电机,完成处置箱箱门的自动开关。
4、进一步地,由视觉感知模块控制的摄像头包括放射源搜寻机器人的耐辐照摄像头、寻迹摄像头和放射源收储机器人的寻迹摄像头;耐辐照摄像头和寻迹摄像头都可以获周围环境的图像信息,通过图传电台将信号传递给控制箱的控制系统。
5、进一步地,由放射源感知模块控制的碘化钠探测仪可以获取周围环境的放射源射线强度信号,通过数传电台将信息回传给控制箱的控制系统,生成波形图对放射源进行判断。
6、进一步地,信号传输模块控制数传电台和图传电台的信号传输,控制箱、放射源搜寻机器人和放射源收储机器人均设有数传电台和图传电台,实现控制箱与机器人之间控制信号和图像信号的传输。
7、进一步地,移动控制模块控制驱动电机和控制器,控制器包括plc和伺服驱动器,能够控制处置机器人系统实现移动、加减速、转向和急停等功能。
8、进一步地,gps定位模块用于机器人的定位,可以实时获取放射源搜寻机器人和放射源收储机器人的位置信息和移动轨迹信息。
9、一种处置机器人系统的控制方案,采用上述的控制系统,进行远程遥控控制,具体操作步骤如下:
10、打开控制系统对程序进行自检,检查控制系统是否完好;
11、控制箱连接控制系统,机器人系统本体端的控制系统完成初始化;
12、操控控制箱的移动按钮,移动信息通过数传电台传递给处置机器人系统,控制放射源搜寻机器人和放射源收储机器人的移动;
13、耐辐照摄像头和寻迹摄像头实时获取周围环境信息,碘化钠探测仪获取放射源的射线强度信号,通过数传电台和图传电台将信息传入控制箱内的控制系统,在控制箱的显示器显示视觉感知模块和放射源感知模块传来的信息,结合图像信息和放射源信息,进行放射源位置的判断;
14、操控控制箱的机械臂控制摇杆,发出机械臂拾取指令,控制放射源搜寻机器人的机械臂进行放射源拾取;
15、放射源搜寻机器人的机械臂拾取成功后,放射源收储机器人的处置箱驱动电机驱动箱门在导轨的滑动,实现处置箱箱门的自动开关,机械臂将拾取的放射源放入处置箱;
16、放射源搜寻机器人和放射源收储机器人完成处置工作后,返回到指定位置。
17、本发明的有益之处至少包括:
18、(1)本发明所提出的控制方案能够同时进行两个机器人的协同控制,实现放射源搜寻机器人和放射源收储机器人的协同工作,显著提升工作效率;
19、(2)本发明所提出的控制方案能够通过视觉感知模块和放射源感知模块对放射源进行自动判断,通过自动化处置箱控制模块可以实现处置箱的自动开关,完成对放射源自动收储,实现了处置机器人系统的自动化;
20、(3)本发明所提出的控制方案能够避免工作人员与放射源的直接接触,降低了放射源对工作人员的危害,可以在核安全领域进行推广运用。
技术特征:
1.一种处置机器人系统的控制方案,其特征在于,包括远程遥控控制端和机器人系统本体端,远程遥控控制端和机器人系统本体端远程遥控连接;所述的远程遥控控制端用于控制机器人对放射源的搜寻、机器人底盘的运动、机械臂的运动、处置箱箱门的开关,所述的远程遥控控制端包括用于接收和传输信号的数传电台和图传电台,用于显示图像信号的显示器;机器人系统本体端为放射源搜寻机器人和放射源收储机器人;所述放射源搜寻机器人包括机械臂控制模块、视觉感知模块、信号传输模块、放射源感知模块、gps定位模块和移动控制模块;所述放射源收储机器人包括自动化处置箱控制模块、视觉感知模块、信号传输模块、gps定位模块和移动控制模块;所述的机械臂控制模块用于控制放射源搜寻机器人机械臂运动;所述的自动化处置箱控制模块用于控制放射源收储机器人的处置箱开关;所述的视觉感知模块用于控制放射源搜寻机器人的耐辐照摄像头、寻迹摄像头和放射源收储机器人的寻迹摄像头;所述的放射源感知模块用于控制放射源搜寻机器人的碘化钠探测仪。
2.根据权利要求1所述的一种处置机器人系统的控制方案,其特征在于,由机械臂控制模块控制的机械臂包括六自由度机械臂和夹爪,六自由度机械臂主要包括移动关节、关节驱动电机,实现六自由度机械臂的多自由度运动;由机械臂控制模块控制的夹爪包括刚性部分和柔性部分,刚性部分包括刚性爪和驱动电机,柔性部分包括夹爪上的力反馈系统,实现对放射源的柔性夹取。
3.根据权利要求1所述的一种处置机器人系统的控制方案,其特征在于,由自动化处置箱控制模块控制的处置箱主要包括导轨、丝杆、箱门和驱动电机,能够完成处置箱箱门的自动开关。
4.根据权利要求1所述的一种处置机器人系统的控制方案,其特征在于,由视觉感知模块控制的耐辐照摄像头、寻迹摄像头可以获取周围环境的图像信息,并通过图传电台将信号传输给控制箱的控制系统。
5.根据权利要求1所述的一种处置机器人系统的控制方案,其特征在于,由放射源感知模块控制的碘化钠探测仪可以获取周围环境放射源射线的强度和能量数值,通过数传电台将信息回传给控制箱的控制系统,生成波形图对放射源进行判断。
6.采用权利要求1所述的控制系统可以进行远程遥控控制,具体操作步骤如下:
技术总结
本发明提供了一种处置机器人系统的控制方案,处置机器人系统包括放射源搜寻机器人和放射源收储机器人,控制系统包括机器人系统本体端和远程遥控控制端。机器人系统本体端包括机械臂控制模块、自动化处置箱控制模块等。远程遥控控制端包括数传电台、显示屏、工控机和PLC等。通过远程遥控控制端控制机器人运动,放射源搜寻机器人将图像和放射源信息传给远程遥控控制端,操控机械臂拾取放射源并放入放射源收储机器人的处置箱,实现了处置机器人系统的搜寻、处置等一体化功能,避免了工作人员与放射源的直接接触,并且控制系统和控制方法简单,人工的学习和使用的成本低,可以在核安全领域推广和应用。
技术研发人员:汪凯,欧阳宇康,代杨杰,何顺才,窦美琪
受保护的技术使用者:成都理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!