一种机器人混合减速伺服关节的制作方法
本发明涉及机械设计,尤其涉及一种机器人混合减速伺服关节。
背景技术:
1、在工业自动化、机器人等领域使用的伺服减速电机,普遍体积较大,在很多微型领域无法使用伺服减速电机。而现有的适合微型领域使用的伺服电机一般采用的是单组啮合,承载低,稍微过载就会出现打齿、卡死等问题。同时由于市场需求,本领域的技术人员也一直致力于伺服电机小型化,在体积可控下做到高扭矩和角度精确可控,以便安装在各类对体积要求严格的产品中,从而可以更好的完成小型化、集成化的可动产品。
技术实现思路
1、鉴于上述状况,有必要提出一种大承载、适合瞬间冲击负荷大的机器人混合减速伺服关节。
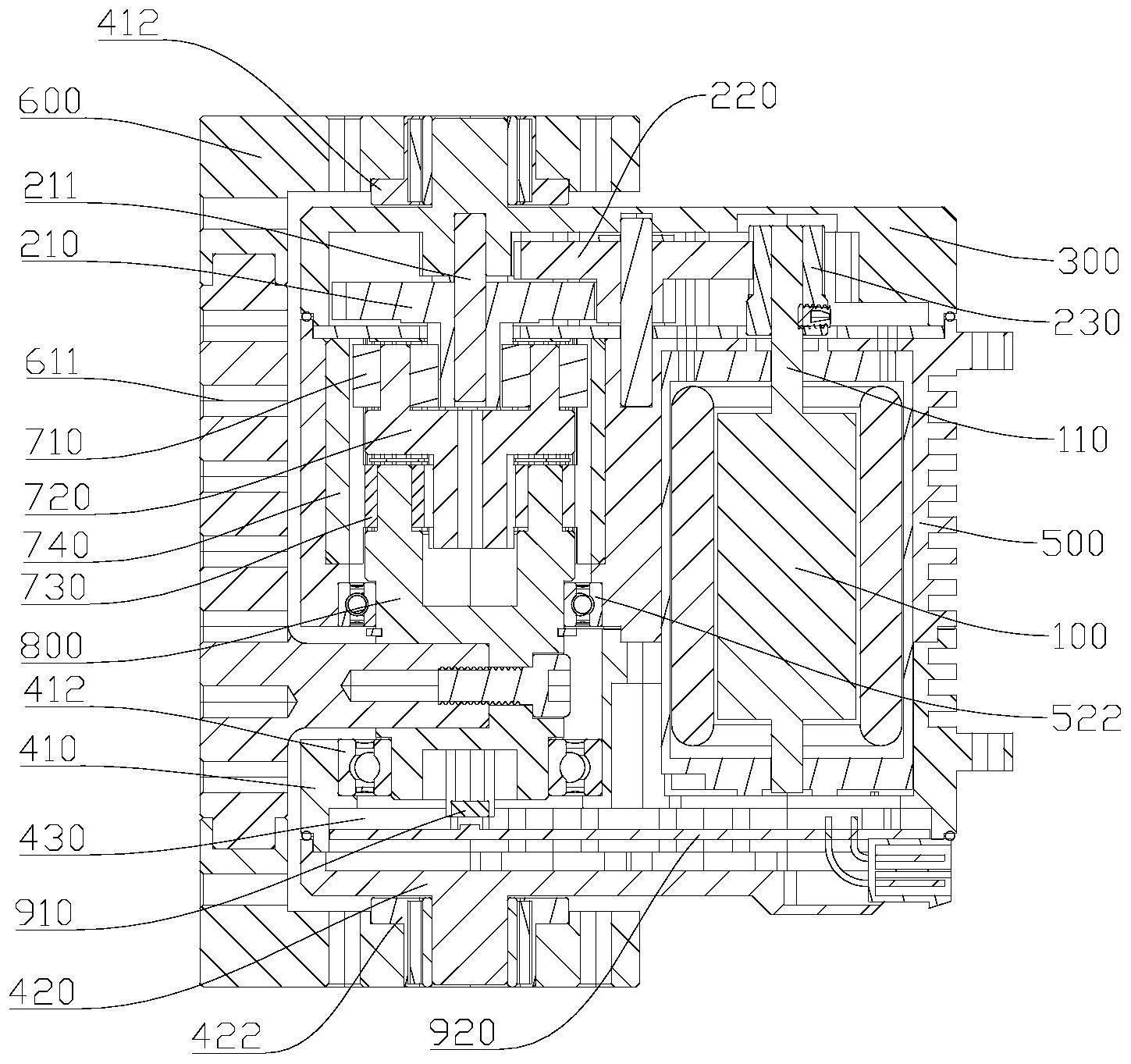
2、为了解决上述技术问题,本发明采用的技术方案为:一种机器人混合减速伺服关节,包括:
3、马达;
4、直齿轮组,传动连接所述马达,并包括一套设在所述平行轴上的第一双联齿轮,所述第一双联齿轮具有与所述马达的转子间隔平行设置的平行轴,所述直齿轮组形成减速传动;
5、上壳体,具有容纳所述直齿轮组的第一容纳腔和固定所述平行轴的固定部;
6、行星减速组,包括第一行星轮组、第一行星架、第二行星轮组和内齿圈,所述第一行星轮组环绕啮合所述第一双联齿轮的下齿轮设置,所述第一行星架包括第一行星盘、设置在所述第一行星盘上并与所述第一行星轮组配合的第一行星柱、以及沿所述第一行星盘背向所述第一行星柱的一面延伸的第一中心齿轮,所述第二行星轮组环绕啮合所述中心齿轮设置,所述第二行星轮组位于所述第一行星轮组的下方、所述第二横臂的上方,所述内齿圈设有与所述第一行星轮组和所述第二行星轮组啮合的内齿,所述行星减速组形成减速传动;
7、输出轴,包括轴芯和设置在轴芯上第二行星柱,所述第二行星柱与所述第二行星轮组配合,所述轴芯上设有径向设置的安装孔,所述第二横臂与所述安装孔固定连接;
8、下壳体,设有容纳所述输出轴的下部的容纳槽,所述容纳槽内设有与所述输出轴配合的第二轴承;
9、e型力臂,包括竖臂和与所述竖臂间隔相连的第一横臂、第二横臂、第三横臂,所述上壳体在所述平行轴的正上方延伸有第一凸柱,所述第一凸柱通过第一轴承与所述第一横臂相连,所述第一凸柱和所述平行轴同轴设置,所述下壳体的下方设有凸起的第二凸柱,所述第二凸柱上套设有第三轴承,所述第三横臂套设在所述第三轴承外,所述第一横臂、所述第二横臂和所述第三横臂的转动平面相互平行且与所述输出轴的转动轴线垂直,所述竖臂上设有若干输出安装孔,所述第一凸柱、所述第二凸柱、所述平行轴和所述输出轴同轴;
10、角度闭环检测器,设置在所述输出轴的正下方,检测所述输出轴的转动角度;
11、主控电路板,与所述马达和所述角度闭环检测器电连接。
12、进一步的,所述行星减速组还包括若干组第三行星轮组和第二行星架,所述第三行星轮组和所述第二行星架设置在所述第一行星轮组和第二行星轮组之间,所述第三行星轮组与所述第一行星架的所述第一中心齿轮啮合并与所述内齿圈啮合,所述第二行星架包括第二行星盘、设置在所述第二行星盘上的第二行星柱和设置在所述第二行星盘背向所述第二行星柱的一面的第二中心齿轮,所述第二中心齿轮与另一所述第三行星轮组或所述第二行星轮组啮合。
13、进一步的,还包括中部壳体,所述上壳体、所述中部壳体和所述下壳体依次相连,所述中部壳体设有供马达安装的马达腔和供所述行星减速组安装的安装腔。
14、进一步的,所述中部壳体的底部设有轴承槽,所述轴承槽内设有第四轴承,所述第四轴承与所述输出轴相适配。
15、进一步的,所述下壳体包括可拆卸连接的第一下壳体和第二下壳体,所述容纳槽设置在所述第一下壳体上,所述第一下壳体和所述第二下壳体之间形成容纳所述角度闭环检测器和所述主控电路板的内腔,所述第二凸柱设置在所述第二下壳体背向所述第一下壳体的一面、所述行星减速组的正下方。
16、进一步的,所述内齿圈的齿圈轴心与所述输出轴的旋转轴心同轴。
17、进一步的,所述固定部上设有与所述平行轴相适配的盲孔,所述盲孔的中部设有径向延伸并对称设置的第一螺孔和第二螺孔,所述第一螺孔内设有第一锁紧螺柱,所述第二螺孔内设有第二锁紧螺柱抵接固定所述平行轴。
18、进一步的,所述直齿轮组为一级或多级减速。
19、进一步的,所述直齿轮组包括依次传动啮合的主动齿轮、第二双联齿轮和第一双联齿轮,所述主动齿轮与所述转子固定连接,所述第二双联齿轮为二级双联齿轮,所述第一双联齿轮为三级双联齿轮。
20、进一步的,所述第二横臂通过所述安装孔与所述输出轴通过螺栓固定连接。
21、本发明的有益效果在于:伺服减速电机通常体积很大,在很多微型领域无法使用伺服减速电机,本发明由直齿轮组和行星减速组组成的减速机构,显著的增加了空间利用率,从而在非常小的体积下,实现了具有普通伺服电机可定位、定速的功能前提下,把体积做到了微型化。只需要小体积就可以实现大减速比,使结构使承载能力极大发挥,尤其在瞬间冲击里具有较大的应用领域,可以实现高的可靠性能和节约成本的效益,该发明结构优化合理,内部结构空间设置合理,尤其对可加工性方便操作,对加工设备要求低,较现有的其他微型伺服产品,可容易量产且实现优异的成本控制。
技术特征:
1.一种机器人混合减速伺服关节,其特征在于,包括:
2.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,所述行星减速组还包括若干组第三行星轮组和第二行星架,所述第三行星轮组和所述第二行星架设置在所述第一行星轮组和第二行星轮组之间,所述第三行星轮组与所述第一行星架的所述第一中心齿轮啮合并与所述内齿圈啮合,所述第二行星架包括第二行星盘、设置在所述第二行星盘上的第二行星柱和设置在所述第二行星盘背向所述第二行星柱的一面的第二中心齿轮,所述第二中心齿轮与另一所述第三行星轮组或所述第二行星轮组啮合。
3.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,还包括中部壳体,所述上壳体、所述中部壳体和所述下壳体依次相连,所述中部壳体设有供马达安装的马达腔和供所述行星减速组安装的安装腔。
4.根据权利要求3所述的一种机器人混合减速伺服关节,其特征在于,所述中部壳体的底部设有轴承槽,所述轴承槽内设有第四轴承,所述第四轴承与所述输出轴相适配。
5.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,所述下壳体包括可拆卸连接的第一下壳体和第二下壳体,所述容纳槽设置在所述第一下壳体上,所述第一下壳体和所述第二下壳体之间形成容纳所述角度闭环检测器和所述主控电路板的内腔,所述第二凸柱设置在所述第二下壳体背向所述第一下壳体的一面、所述行星减速组的正下方。
6.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,所述内齿圈的齿圈轴心与所述输出轴的旋转轴心同轴。
7.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,所述固定部上设有与所述平行轴相适配的盲孔,所述盲孔的中部设有径向延伸并对称设置的第一螺孔和第二螺孔,所述第一螺孔内设有第一锁紧螺柱,所述第二螺孔内设有第二锁紧螺柱抵接固定所述平行轴。
8.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,所述直齿轮组为一级或多级减速。
9.根据权利要求8所述的一种机器人混合减速伺服关节,其特征在于,所述直齿轮组包括依次传动啮合的主动齿轮、第二双联齿轮和第一双联齿轮,所述主动齿轮与所述转子固定连接,所述第二双联齿轮为二级双联齿轮,所述第一双联齿轮为三级双联齿轮。
10.根据权利要求1所述的一种机器人混合减速伺服关节,其特征在于,所述第二横臂通过所述安装孔与所述输出轴通过螺栓固定连接。
技术总结
本发明涉及一种机器人混合减速伺服关节,伺服减速电机通常体积很大,在很多微型领域无法使用伺服减速电机,本发明由直齿轮组和行星减速组组成的减速机构,显著的增加了空间利用率,从而在非常小的体积下,实现了具有普通伺服电机可定位、定速的功能前提下,把体积做到了微型化。只需要小体积就可以实现大减速比,使结构使承载能力极大发挥,尤其在瞬间冲击里具有较大的应用领域,可以实现高的可靠性能和节约成本的效益,该发明结构优化合理,内部结构空间设置合理,尤其对可加工性方便操作,对加工设备要求低,较现有的其他微型伺服产品,可容易量产且实现优异的成本控制。
技术研发人员:吴炳华
受保护的技术使用者:深圳市默启文化科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!