一种工业机器人的小臂及工业机器人的制作方法
本发明涉及工业机器人,尤其涉及一种工业机器人的小臂及工业机器人。
背景技术:
1、在现代化工业生产领域中,机器人是一种常见的智能设备,可以有效代替人工进行操作,其中在半导体、电子芯片及晶圆的制造过程中,机器人应用最为广泛,而此类行业中,主要其作用的是机器人的手臂,一般由伸缩气缸、吸盘组成,可以沿线性滑轨运动,以将芯片、晶圆等产品移动至指定位置。
2、而由于在移动过程中产生抖动等因素,有时吸盘上的芯片等产品会掉落,而为防止产品受到污损。专利公开号为“cn115157304a”公开了一种工业机器人手臂,其主要在吸盘吸附产品上升后,气缸通过牵引组件将挡臂拉动至阻挡位置,如此可防止产品掉落在地。其方案在使用时会有以下缺陷:由于挡臂为弯弧型结构,在被牵引组件拉动合起时,各挡臂之间仍会产生较大的间隙,此时对于一些较窄的产品在脱落时,会穿过间隙掉落在地,此外对于较薄的芯片、晶圆来说,若在掉落过程翻转为竖直状态时,也会穿过间隙掉落在地。鉴于此,本申请提出一种工业机器人的小臂及工业机器人。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种工业机器人的小臂及工业机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种工业机器人的小臂,包括伸缩气缸与臂箱,其中伸缩气缸由缸座与缸臂组成,所述缸臂滑动贯穿臂箱,所述臂箱的两相对侧壁均开设有转动槽,所述转动槽内转动连接有齿轮,各所述齿轮的侧壁上均固定连接有防护箱板,且两个所述防护箱板合起后能够封闭臂箱,所述臂箱内顶部固定连接有伸缩套筒,且所述伸缩套筒的伸缩端固定连接有齿条,所述齿条与齿轮啮合,所述齿条通过连接机构与缸臂连接,所述缸臂的下端安装有橡胶吸盘。
4、优选地,所述连接机构包括螺杆、螺母、第一连杆与第二连杆,所述第一连杆与第二连杆分别固定连接有在螺母两侧,所述螺母螺纹连接在螺杆上,且所述第一连杆滑动贯穿齿条,所述臂箱内壁上开设有与第一连杆配合的第一限位孔,所述缸臂侧壁上开设有与第二连杆配合的第二限位孔。
5、优选地,所述防护箱板底部安装有压力传感器,所述齿条侧壁上安装有伺服电机,且所述伺服电机的输出轴与螺杆固定连接。
6、优选地,所述缸臂的侧壁固定连接有支撑板,所述支撑板的下端固定设置有下气囊,所述下气囊通过吸气管与橡胶吸盘相通,所述下气囊还连通有出气管,所述吸气管与出气管内均安装有单向阀,所述防护箱板内壁上固定连接有挤压棒。
7、优选地,所述支撑板的上端固定连接有上气囊,所述出气管与上气囊相通,所述上气囊还连通有排气管,所述排气管内安装有泄压阀,且所述排气管内还安装有气动发声部件。
8、本发明还提出了一种工业机器人,包括上述的一种工业机器人的小臂,还包括运动滑轨、滑座及吊杆,其中滑座沿运动滑轨滑动,所述吊杆上下两端分别与滑座、臂箱固定连接。
9、本发明具有以下有益效果:
10、1、通过设置齿轮、齿条及防护箱板,可在伸缩气缸带动吸盘及产品上升至臂箱内后,则齿条拉动齿轮转动,如此可带动两个防护箱板合起,并与臂箱形成一个封闭空间,如此可完全避免产品因从吸盘上脱落而掉落在地;
11、2、通过设置连接机构,可使的齿条与缸臂、臂箱内壁连接或分离,如此可在防护箱板底部的压力传感器检测到产品脱落时,即可操控连接机构与臂箱连接,使齿条与缸臂分离,如此能够对防护箱板进行固定,同时伸缩气缸能够带动橡胶吸盘再次下移并重新吸附住产品;
12、3、通过设置下气囊,当伸缩气缸带动橡胶吸盘下移吸附产品后再次上移时,则下气囊能够继续从橡胶吸盘吸出一部分空气,可以增大橡胶吸盘的吸力,防止再次掉落;
13、4、通过设置上气囊,当伸缩气囊多次上下移动,仍未吸附住产品时,则上气囊内的空气可从排气管排出,气流经过排气管内的气动发声部件时,还将产生警报音响,以及时通知工作人员前来检修。
技术特征:
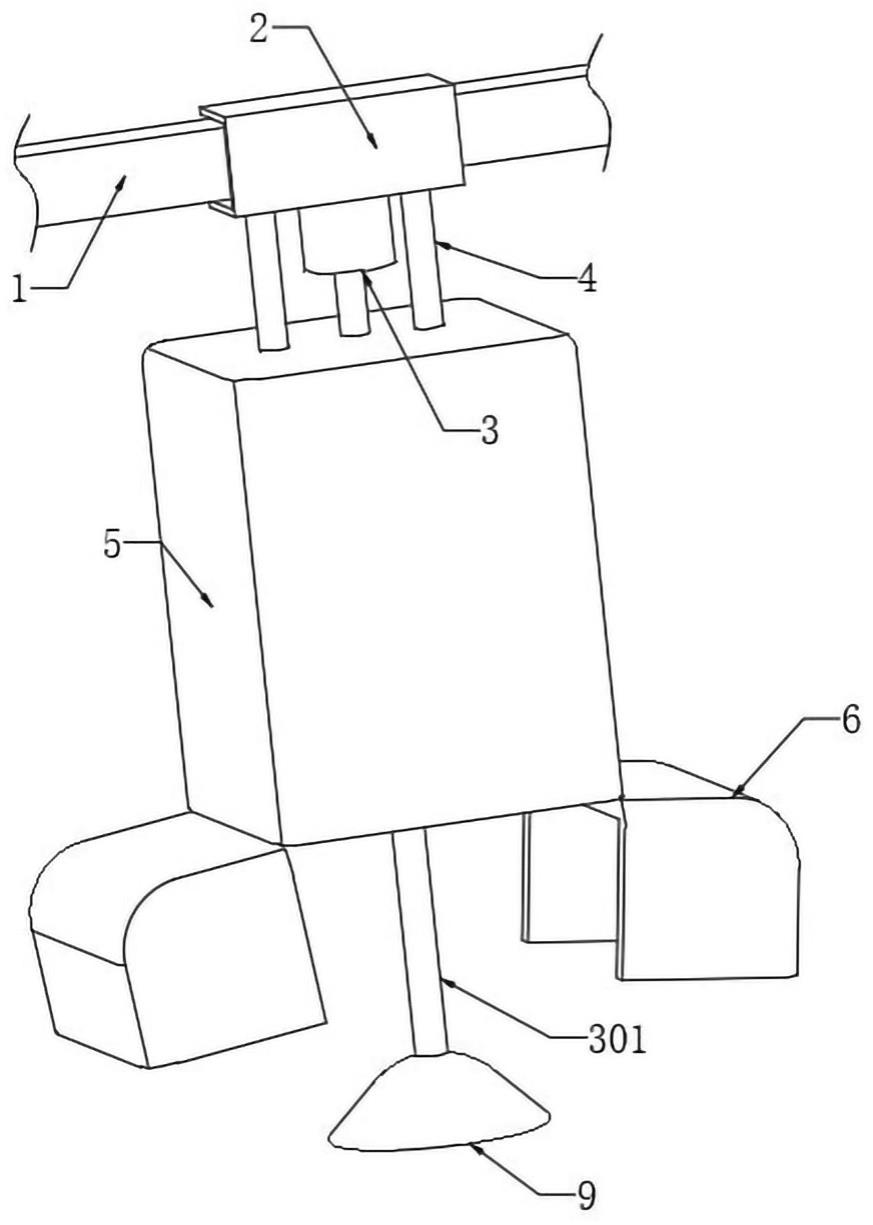
1.一种工业机器人的小臂,包括伸缩气缸(3)与臂箱(5),其中伸缩气缸(3)由缸座(302)与缸臂(301)组成,其特征在于,所述缸臂(301)滑动贯穿臂箱(5),所述臂箱(5)的两相对侧壁均开设有转动槽(7),所述转动槽(7)内转动连接有齿轮(8),各所述齿轮(8)的侧壁上均固定连接有防护箱板(6),且两个所述防护箱板(6)合起后能够封闭臂箱(5),所述臂箱(5)内顶部固定连接有伸缩套筒(12),且所述伸缩套筒(12)的伸缩端固定连接有齿条(11),所述齿条(11)与齿轮(8)啮合,所述齿条(11)通过连接机构与缸臂(301)连接,所述缸臂(301)的下端安装有橡胶吸盘(9)。
2.根据权利要求1所述的一种工业机器人的小臂,其特征在于,所述连接机构包括螺杆(16)、螺母(17)、第一连杆(18)与第二连杆(19),所述第一连杆(18)与第二连杆(19)分别固定连接有在螺母(17)两侧,所述螺母(17)螺纹连接在螺杆(16)上,且所述第一连杆(18)滑动贯穿齿条(11),所述臂箱(5)内壁上开设有与第一连杆(18)配合的第一限位孔(14),所述缸臂(301)侧壁上开设有与第二连杆(19)配合的第二限位孔(20)。
3.根据权利要求2所述的一种工业机器人的小臂,其特征在于,所述防护箱板(6)底部安装有压力传感器(10),所述齿条(11)侧壁上安装有伺服电机(15),且所述伺服电机(15)的输出轴与螺杆(16)固定连接。
4.根据权利要求1所述的一种工业机器人的小臂,其特征在于,所述缸臂(301)的侧壁固定连接有支撑板(22),所述支撑板(22)的下端固定设置有下气囊(23),所述下气囊(23)通过吸气管(26)与橡胶吸盘(9)相通,所述下气囊(23)还连通有出气管(21),所述吸气管(26)与出气管(21)内均安装有单向阀,所述防护箱板(6)内壁上固定连接有挤压棒(13)。
5.根据权利要求4所述的一种工业机器人的小臂,其特征在于,所述支撑板(22)的上端固定连接有上气囊(24),所述出气管(21)与上气囊(24)相通,所述上气囊(24)还连通有排气管(25),所述排气管(25)内安装有泄压阀,且所述排气管(25)内还安装有气动发声部件。
6.一种工业机器人,其特征在于,包括权利要求1-5任意一项所述的一种工业机器人的小臂,还包括运动滑轨(1)、滑座(2)及吊杆(4),其中滑座(2)沿运动滑轨(1)滑动,所述吊杆(4)上下两端分别与滑座(2)、臂箱(5)固定连接。
技术总结
本发明公开了一种工业机器人的小臂,包括伸缩气缸与臂箱,其中伸缩气缸由缸座与缸臂组成,所述缸臂滑动贯穿臂箱,所述臂箱的两相对侧壁均开设有转动槽,所述转动槽内转动连接有齿轮,各所述齿轮的侧壁上均固定连接有防护箱板;本发明还公开了一种工业机器人,包括上述的一种工业机器人的小臂,还包括运动滑轨、滑座及吊杆,其中滑座沿运动滑轨滑动,所述吊杆上下两端分别与滑座、臂箱固定连接。本发明通过设置齿轮、齿条及防护箱板,可在伸缩气缸带动吸盘及产品上升至臂箱内后,则齿条拉动齿轮转动,如此可带动两个防护箱板合起,并与臂箱形成一个封闭空间,如此可完全避免产品因从吸盘上脱落而掉落在地。
技术研发人员:孙丙睿,郭子涵,孙寿海,王如意,孟亚琪,李春雨,叶明山,李娜丽
受保护的技术使用者:北京智能智造科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!