一种柔索驱动的可调式解耦冗余机械臂的制作方法
本发明属于机械臂,具体涉及一种柔索驱动的可调式解耦冗余机械臂。
背景技术:
1、柔索驱动的冗余机械臂运动灵活,具备回避障碍物、多目标优化的能力,广泛应用于航空航天、特种加工、核电站监测、医疗和灾害救援等领域。
2、传统柔索驱动的机械臂主要存在以下问题:结构尺寸固定,无法调节机械臂整体位置,无法调节机械臂末端执行器的尺寸;驱动各个关节的柔索长度存在着耦合关系,未实现完全解耦。现有技术中提到的结构,例如途经绳外套导管降低耦合作用的结构等,只是在公式推导中分析了各个耦合参数之间的关系,均未从结构上实现解耦。
技术实现思路
1、本发明的目的在于克服上述缺陷,提供一种柔索驱动的可调式解耦冗余机械臂,解决了传统柔索驱动的机械臂无法从结构上实现解耦的技术问题,本发明从结构上实现了完全解耦。
2、为实现上述发明目的,本发明提供如下技术方案:
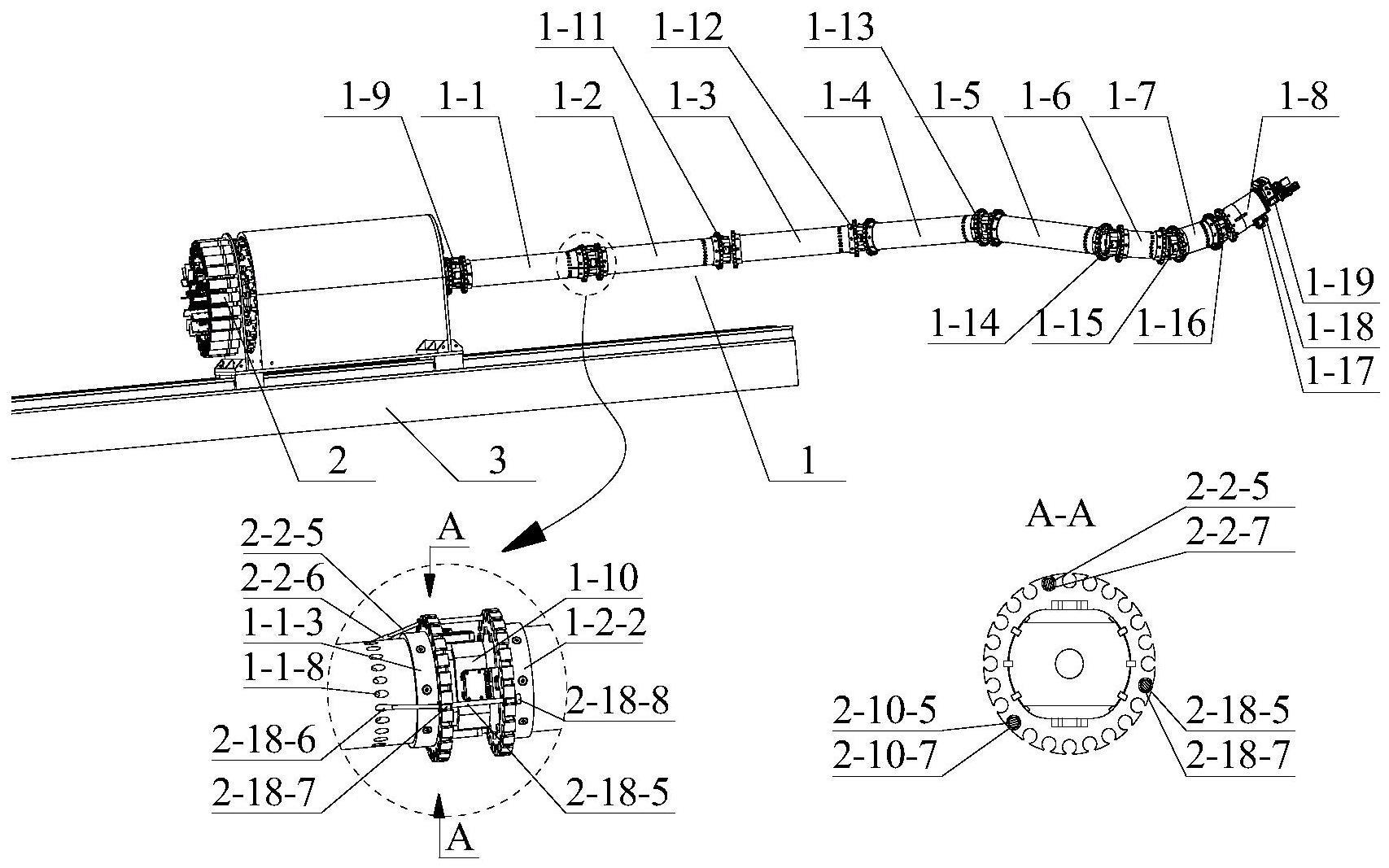
3、一种柔索驱动的可调式解耦冗余机械臂,包括n个臂杆、n个中空万向节、n组驱动柔索组和驱动机构;
4、设n个臂杆分别为第1、2……n臂杆,n个中空万向节分别为第1、2……n中空万向节,n组驱动柔索组分别为第1、2……n组驱动柔索组;
5、其中第1臂杆通过第1中空万向节与基座连接,第2~n臂杆分别通过第2~n中空万向节与前一臂杆连接;
6、第1~n-1臂杆中,每个臂杆包含中空套筒和分别连接于中空套筒两端的两个端盖,以从第1臂杆到第n臂杆的方向为从前到后,将两个端盖分别记为前端盖和后端盖;第n臂杆包括臂杆主体和连接于臂杆主体前端的前端盖;
7、每组驱动柔索组中包含若干根驱动柔索,第1组驱动柔索组中的驱动柔索前端连接驱动机构,后端连接第1臂杆的前端盖;令i=2……n,第i组驱动柔索组中的驱动柔索前端连接驱动机构,后端依次穿过第1~i-2臂杆的中空套筒内部后,到达第i-1臂杆的中空套筒内部,并由第i-1臂杆的中空套筒穿出,连接至第i臂杆的前端盖;n>3;
8、驱动机构对各根驱动柔索独立驱动,驱动机构分别通过第1、2……n组驱动柔索组驱动第1、2……n臂杆运动。
9、进一步的,每组驱动柔索组中包含3根驱动柔索;
10、臂杆的中空套筒后端设有周向分布的斜孔,斜孔的轴线与中空套筒的轴线呈γ角,0°<γ<90°;
11、第i组驱动柔索组中的3根驱动柔索后端分别由第i-1臂杆的中空套筒所设3个斜孔穿出,连接至第i臂杆的前端盖;所述3个斜孔沿中空套筒轴向呈120°均匀分布。
12、进一步的,
13、其中,d孔是中空套筒的直径,l孔是沿中空套筒轴线方向,斜孔距离中空套筒前端的距离。
14、进一步的,第1~n-1臂杆中的端盖与中空套筒固定连接;第n臂杆中的臂杆主体和前端盖固定连接,第1~n-1臂杆中的端盖和第n臂杆中的前端盖结构相同;
15、圆形端盖的边缘设有圆周均匀分布的若干个定位槽,圆形端盖的中心设有通孔;
16、第i组驱动柔索组中的驱动柔索后端依次穿过第1~i-2臂杆中各臂杆的前端盖通孔、中空套筒内部和后端盖通孔,由第i-1臂杆的前端盖通孔到达第i-1臂杆的中空套筒内部,由第i-1臂杆的中空套筒所设斜孔穿出,经过第i-1臂杆的后端盖所设定位槽后连接至第i臂杆的前端盖所设定位槽。
17、进一步的,臂杆的中空套筒内部设有弹性套管,中空套筒所设斜孔中安装有软体套管,第i-1臂杆的后端盖所设定位槽与第i臂杆的前端盖所设定位槽之间安装有刚性套筒;软体套管两端分别与弹性套管后端和刚性套筒前端连通;
18、第i组驱动柔索组中的驱动柔索后端依次穿过第1~i-2臂杆的中空套筒内部的弹性套管、第i-1臂杆的中空套筒上安装的软体套管和刚性套筒后连接至第i臂杆的前端盖。
19、进一步的,端盖包括圆环形结构和附加贴片;
20、圆环形结构与中空套筒固定连接,定位槽设于圆环形结构的边缘;
21、附加贴片通过卡扣可拆除的安装于圆环形结构内圈,附加贴片中心设置通孔;
22、第1~n-1臂杆中,前端盖和后端盖上分别安装有用于测量臂杆偏航角度和俯仰角度的角度传感器;
23、第n臂杆中的前端盖上安装有角度传感器,第n臂杆后端安装有机械手(执行器);
24、端盖与中空万向节通过轴承连接。
25、进一步的,第n臂杆为可伸缩臂杆;
26、第n臂杆的臂杆主体包括前段臂杆和末端臂杆,前段臂杆前端安装前端盖,前段臂杆后端与末端臂杆过渡配合;前段臂杆后端设有豁口,末端臂杆沿轴线方向从前到后依次设有n个螺纹孔,n≥3;
27、利用螺钉将豁口与不同的螺纹孔配合,实现第n臂杆长度的调整。
28、进一步的,第1~n-1臂杆中,包含n1个长臂杆和n2个短臂杆,n1+n2=n-1,n2≥1;n1≥1;长臂杆的长度大于短臂杆;
29、n2个短臂杆设于n1个长臂杆的后方。
30、进一步的,还包括滑台机构;
31、滑台机构包括导轨电机和导轨;
32、基座安装于导轨上;
33、导轨电机驱动导轨运动,导轨的运动带动基座、驱动机构和n个臂杆的整体平移。
34、进一步的,驱动机构包括3n个单元驱动机构,3n个单元驱动机构分别独立驱动3n根驱动柔索;基座为垂直导轨设置的环形结构,3n个单元驱动机构在基座上以圆周阵列的形式均匀分布;
35、每个单元驱动机构包含电机、联轴器、丝杠和滑块;
36、电机的输出轴通过联轴器连接丝杠,滑块安装于丝杠上,滑块与驱动柔索固定连接,电机的输出轴的转动通过丝杠转换为滑块在丝杠上的平移,滑块的平移带动驱动柔索的拉紧或放松。
37、本发明与现有技术相比具有如下至少一种有益效果:
38、(1)本发明创造性的提出了一种柔索驱动的可调式解耦冗余机械臂,通过设计新型臂杆结构,使得不控制该臂杆的驱动柔索从内部穿过,从结构上实现了完全解耦,降低了运动学模型的复杂程度,进而降低了整个系统的复杂程度,降低计算量和计算时间,有效提高控制效率,保证实时性
39、(2)降低计算量,可以提高控制效率降低了计算量。并通过理论推导,证明了本发明的有效性与优化性。该机械臂通过柔索驱动,可实现诸多任务,例如代替人类进行高危险工作、在狭小空间完成探测与抓取任务、在太空环境中捕捉垃圾或执行任务。
40、(2)本发明设置了斜孔、弹性套管、软体套管等结构,对驱动柔索进行有效的导向,有利于减小驱动柔索的摩擦力,提高传动效率;
41、(3)本发明通过臂杆长度不相等(始端臂杆长、末端臂杆短且可调)的特征,提高了机械臂的末端灵活性,通过图像与计算结果均证明了该项结论;
42、(4)本发明通过设计新型末端臂杆结构,使得机械臂整体位置与末端臂杆尺寸均可调节,从而增加机械臂的运动范围及末端灵活性。
技术特征:
1.一种柔索驱动的可调式解耦冗余机械臂,其特征在于,包括n个臂杆、n个中空万向节、n组驱动柔索组和驱动机构;
2.根据权利要求1所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,每组驱动柔索组中包含3根驱动柔索;
3.根据权利要求2所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,
4.根据权利要求2所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,第1~n-1臂杆中的端盖与中空套筒固定连接;第n臂杆中的臂杆主体和前端盖固定连接,第1~n-1臂杆中的端盖和第n臂杆中的前端盖结构相同;
5.根据权利要求4所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,臂杆的中空套筒内部设有弹性套管,中空套筒所设斜孔中安装有软体套管,第i-1臂杆的后端盖所设定位槽与第i臂杆的前端盖所设定位槽之间安装有刚性套筒;软体套管两端分别与弹性套管后端和刚性套筒前端连通;
6.根据权利要求4所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,端盖包括圆环形结构和附加贴片;
7.根据权利要求1所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,第n臂杆为可伸缩臂杆;
8.根据权利要求1所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,第1~n-1臂杆中,包含n1个长臂杆和n2个短臂杆,n1+n2=n-1,n2≥1;长臂杆的长度大于短臂杆;
9.根据权利要求2所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,还包括滑台机构;
10.根据权利要求9所述的一种柔索驱动的可调式解耦冗余机械臂,其特征在于,驱动机构包括3n个单元驱动机构,3n个单元驱动机构分别独立驱动3n根驱动柔索;基座为垂直导轨设置的环形结构,3n个单元驱动机构在基座上以圆周阵列的形式均匀分布;
技术总结
本发明公开了一种柔索驱动的可调式解耦冗余机械臂,其中第1臂杆通过第1中空万向节与基座连接,第2~N臂杆分别通过第2~N中空万向节与前一臂杆连接;第1~N‑1臂杆中,每个臂杆包含中空套筒和分别连接于中空套筒两端的两个端盖;第N臂杆包括臂杆主体和连接于臂杆主体前端的前端盖;每组驱动柔索组中包含若干根驱动柔索,第i组驱动柔索组中的驱动柔索前端连接驱动机构,后端依次穿过第1~i‑2臂杆的中空套筒内部后,到达第i‑1臂杆的中空套筒内部,并由第i‑1臂杆的中空套筒穿出,连接至第i臂杆的前端盖;驱动机构对各根驱动柔索独立驱动,驱动机构分别通过第1、2……N组驱动柔索组驱动第1、2……N臂杆运动。本发明从结构上实现了完全解耦。
技术研发人员:贾龙飞,郭亚星,宋洪舟,尹业成,曾思,赵守军,黄玉平
受保护的技术使用者:北京精密机电控制设备研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!