三自由度腕式机械手驱动装置和三自由度腕式机械手
本发明涉及医疗设备,具体而言,涉及一种三自由度腕式机械手驱动装置和三自由度腕式机械手。
背景技术:
1、随着科学技术的发展,为了满足外科手术应用场景,手术机器人行业在不断发展。在显微外科手术领域常见的手术场景是医生在放大镜或显微镜下对带血管的游离皮瓣进行吻合操作,而人手的操作精度为0.1mm,生理性震颤振幅超过100mm使得依靠人手是无法进行更小血管的吻合操作。
2、因此,目前亟需提供一种更高操作精度、更具有灵巧性的三自由度腕式机械手驱动装置。
技术实现思路
1、本发明提供了一种三自由度腕式机械手驱动装置,能够提高显微外科手术的操作精度。
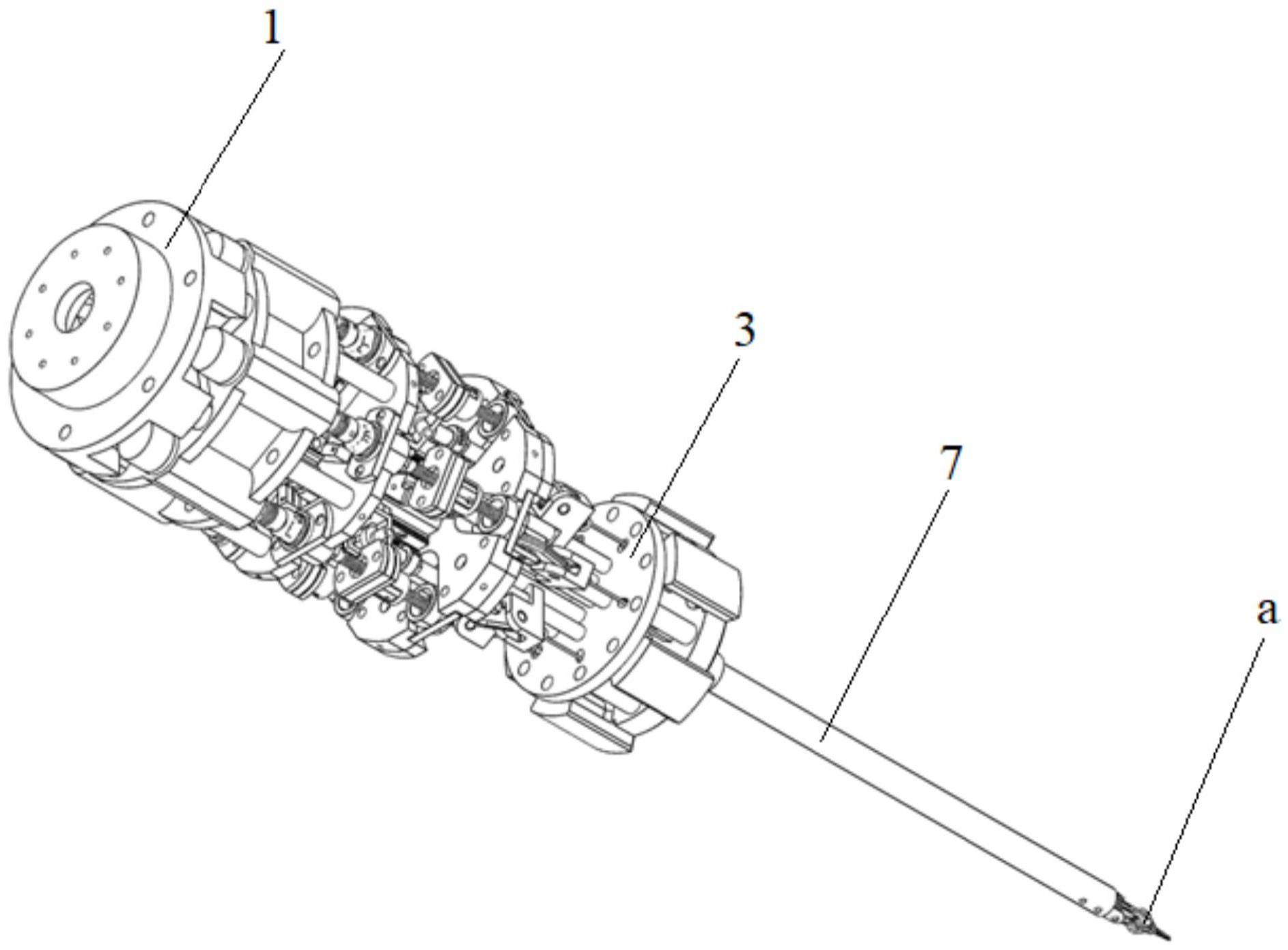
2、有鉴于此,本发明提出了一种三自由度腕式机械手驱动装置,包括:上支撑座;下支撑座,与所述上支撑座面对面设置;支撑组件,连接所述上支撑座和所述下支撑座,所述支撑组件包括多个支撑部件,多个所述支撑部件沿着所述上支撑座和所述下支撑座的周向设置;动力驱动机构,包括多个驱动组件、多个传动组件、多个导向组件和多个驱动丝,多个所述驱动部件和多个所述传动组件均沿着所述上支撑座的周向设置,多个所述导向组件沿着所述下支撑座的周向设置,各个所述驱动部件与各个所述传动组件连接,各个所述传动组件带动各个所述驱动丝连接,所述驱动丝经过所述导向组件与所述目标对象连接。
3、在一些可选的实施例中,所述上支撑座包括第一支撑座、第二支撑座、第三支撑座和支撑柱,所述支撑柱依次连接所述第一支撑座、所述第二支撑座和所述第三支撑座;所述第一支撑座、所述第二支撑座、所述第三支撑座和所述支撑柱的中心轴重合。
4、在一些可选的实施例中,所述驱动组件包括驱动部件、联轴器、第一轴承座、第二轴承座、丝杠和丝杠螺母,所述驱动部件设置于所述上支撑座,所述第一轴承座设置于所述第二支撑座,所述驱动部件通过所述联轴器与所述第一轴承座连接,所述第二轴承座设置于所述第三支撑座,所述第一轴承座和所述第二轴承座通过所述丝杠连接,所述丝杠螺母与所述丝杠连接。
5、在一些可选的实施例中,还包括多个光电传感器,多个所述光电传感器设置于所述第一支撑座和所述第二支撑座之间的所述支撑柱,多个所述光电传感器围绕所述支撑柱的周向设置。
6、在一些可选的实施例中,还包括多个遮光部件,多个所述遮光部件设置于所述第二支撑座和所述第三支撑座之间,各个所述遮光部件的两端分别连接所述第一支撑座和所述丝杠螺母。
7、在一些可选的实施例中,各个所述传动组件包括多个滑动组件和多个牵引组件,多个所述滑动组件设置于所述第二支撑座和所述第三支撑座之间的所述支撑柱,多个所述滑动组件沿着所述支撑柱的周向设置,多个所述牵引组件沿着所述支撑柱的周向设置,一个所述牵引组件分别至少连接一个所述滑动组件和一个所述驱动丝。
8、在一些可选的实施例中,所述滑动组件包括滑轨和滑块,所述滑轨设置于所述支撑柱,所述滑轨和所述支撑柱的长度方向一致。
9、在一些可选的实施例中,各个牵引组件包括万向球扣、拉力传感器、挂杆、挂钩和固定部件,万向球扣连接拉力传感器的一端,拉力传感器的另一端连接挂杆,滑块、万向球扣和丝杠螺母之间通过固定部件连接,挂杆远离于万向球扣427的一端设置挂钩,挂钩与驱动丝连接。
10、在一些可选的实施例中,所述导向组件包括第一导向部件和第二导向部件,所述第一导向部件的高度大于第二导向部件的高度,所述驱动丝的一端连接所述挂钩、依次经过第一导向部件和所述第二导向部件与所述目标对象连接。
11、另一方面,本发明还提供了一种三自由度腕式机械手,包括以上任一项所述的三自由度机械手驱动装置。
12、本发明和现有技术相比具有以下技术效果:
13、本发明提供了一种三自由度腕式机械手驱动装置,包括上支撑座、下支撑座和动力驱动机构,下支撑座与上支撑座面对面设置,支撑组件连接上支撑座和下支撑座,支撑组件包括多个支撑部件,多个支撑部件沿着上支撑座和下支撑座的周向设置,动力驱动机构包括多个驱动组件、多个传动组件、多个导向组件和多个驱动丝,多个驱动部件和多个传动组件均沿着上支撑座的周向设置,多个导向组件沿着下支撑座的周向设置,各个驱动部件与各个传动组件连接,各个传动组件带动各个驱动丝连接,驱动丝经过导向组件与目标对象连接,驱动丝能够带动目标对象在预设角度下移动预设距离,多个驱动丝协调工作,从而能够更加精准的控制目标对象的角度和方向,提高了外科手术的灵巧度和操作精度。
技术特征:
1.一种三自由度腕式机械手驱动装置,其特征在于,包括:
2.根据权利要求1所述的三自由度腕式机械手驱动装置,其特征在于,所述上支撑座(1)包括第一支撑座(11)、第二支撑座(12)、第三支撑座(13)和支撑柱(14),所述支撑柱(14)依次连接所述第一支撑座(11)、所述第二支撑座(12)和所述第三支撑座(13);所述第一支撑座(11)、所述第二支撑座(12)、所述第三支撑座(13)和所述支撑柱(14)的中心轴重合。
3.根据权利要求2所述的三自由度腕式机械手驱动装置,其特征在于,所述驱动组件包括驱动部件(411)、联轴器(412)、第一轴承座(413)、第二轴承座(414)、丝杠(415)和丝杠螺母(416),所述驱动部件(411)设置于所述上支撑座(1),所述第一轴承座(413)设置于所述第二支撑座(12),所述驱动部件(411)通过所述联轴器(412)与所述第一轴承座(413)连接,所述第二轴承座(414)设置于所述第三支撑座(13),所述第一轴承座(413)和所述第二轴承座(414)通过所述丝杠(415)连接,所述丝杠螺母(416)与所述丝杠(415)连接。
4.根据权利要求3所述的三自由度腕式机械手驱动装置,其特征在于,还包括多个光电传感器(5),多个所述光电传感器(5)设置于所述第一支撑座(11)和所述第二支撑座(12)之间的所述支撑柱(14),多个所述光电传感器(5)围绕所述支撑柱(14)的周向设置。
5.根据权利要求4所述的三自由度腕式机械手驱动装置,其特征在于,还包括多个遮光部件(6),多个所述遮光部件(6)设置于所述第二支撑座(12)和所述第三支撑座(13)之间,各个所述遮光部件(6)的两端分别连接所述第一支撑座(11)和所述丝杠螺母(416)。
6.根据权利要求5所述的三自由度腕式机械手驱动装置,其特征在于,各个所述传动组件包括多个滑动组件和多个牵引组件,多个所述滑动组件设置于所述第二支撑座(12)和所述第三支撑座(13)之间的所述支撑柱(14),多个所述滑动组件沿着所述支撑柱(14)的周向设置,多个所述牵引组件沿着所述支撑柱(14)的周向设置,一个所述牵引组件分别至少连接一个所述滑动组件和一个所述驱动丝(44)。
7.根据权利要求6所述的三自由度腕式机械手驱动装置,其特征在于,所述滑动组件包括滑轨(421)和滑块(422),所述滑轨(421)设置于所述支撑柱(14),所述滑轨(421)和所述支撑柱(14)的长度方向一致。
8.根据权利要求7所述的三自由度腕式机械手驱动装置,其特征在于,各个所述牵引组件包括万向球扣(427)、拉力传感器(423)、挂杆(424)、挂钩(425)和固定部件(426),所述万向球扣(427)连接所述拉力传感器(423)的一端,所述拉力传感器(423)的另一端连接所述挂杆(424),所述滑块(422)、所述万向球扣(427)和所述丝杠螺母(416)之间通过所述固定部件(426)连接,所述挂杆(424)远离于所述万向球扣(427)的一端设置所述挂钩(425),所述挂钩(425)与所述驱动丝(44)连接。
9.根据权利要求8所述的三自由度腕式机械手驱动装置,其特征在于,所述导向组件(43)包括第一导向部件(431)和第二导向部件(432),所述第一导向部件(431)的高度大于第二导向部件(432)的高度,所述驱动丝(44)的一端连接所述挂钩(425)、依次经过第一导向部件(431)和所述第二导向部件(432)与所述目标对象(a)连接。
10.一种三自由度腕式机械手,其特征在于,包括权利要求1-9任一项所述的三自由度腕式机械手驱动装置。
技术总结
本发明提供了一种三自由度腕式机械手驱动装置,包括上支撑座、下支撑座和动力驱动机构,下支撑座与上支撑座面对面设置,支撑组件连接上支撑座和下支撑座,支撑组件包括多个支撑部件,多个支撑部件沿着上支撑座和下支撑座的周向设置,动力驱动机构包括多个驱动组件、多个传动组件、多个导向组件和多个驱动丝,多个驱动部件和多个传动组件均沿着上支撑座的周向设置,多个导向组件沿着下支撑座的周向设置,各个驱动部件与各个传动组件连接,各个传动组件带动各个驱动丝连接,驱动丝经过导向组件与目标对象连接,驱动丝能够带动目标对象在预设角度下移动预设距离,能够更加精准的控制目标对象的角度和方向,提高了外科手术的灵巧度和操作精度。
技术研发人员:边桂彬,叶强,任晗,李桢
受保护的技术使用者:中国科学院自动化研究所
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!