模块化夹爪的制作方法
本发明涉及一种夹爪结构,尤其涉及一种模块化夹爪,螺杆、线轨和固定板采模块化设计,可视需求变更长度并调整作业行程,无需重新设计螺杆与固定板。
背景技术:
1、机器手臂是一种具有模仿人类手臂功能并可完成各种作业的自动控制设备,现已广泛地的应用于自动化机械装置。除了主要用于工业制造上,商业农业、医疗救援、娱乐服务、军事保全等领域都可以发现其应用。构造上由机械主体、控制器、伺服机构和传感器所组成,并由程序根据作业需求设定其一定的指定动作。其中装置安装在机械手臂末端來直接夹取物品的置通常称为夹爪(gripper)、末端执行器(end effector)、或机械手部(robothand)等。其目的在取代人類的手指,以巧妙完成许多复杂作业或是操作各种物品。然而,不同的作业行程,往往会选择不同的驱动方式来架构夹爪结构。
2、以一般市面上常见的长行程夹爪结构为例,其结构包括左旋螺杆与右旋螺杆,并分别在左旋螺杆与右旋螺杆加上皮带轮。马达旋转带动皮带,皮带带动螺杆运转。通过两侧的螺杆运转而使螺帽带动两侧的夹爪座移动,进而达成夹取动作。然而夹爪座的移动受限于各自对应的螺杆长度,使夹爪的夹取作业仅可于以一固定的行程范围内进行。一旦使用者需通过夹爪进行更大范围的行程作业时,夹爪的固定板以及两侧的螺杆便需重新设计,无法直接进行长度变更。
3、有鉴于此,实有必要提供一种模块化夹爪,螺杆、线轨和固定板采模块化设计,可视需求变更长度并调整作业行程,无需重新设计螺杆与固定板,以解决公知技术的缺陷。
技术实现思路
1、本发明的目的在于提供一种模块化夹爪,螺杆、线轨和固定板采模块化设计,可视需求变更长度并调整作业行程,无需重新设计螺杆与固定板。
2、本发明的另一目的在于提供一种模块化夹爪。本体固定板的两相对端可通过延伸板增加长度。其中本体固定板与延伸板的固定方式采平行锁固,避免垂直堆叠锁固,故不增加整体板厚。另外,左旋螺杆和右旋螺杆的二螺杆本体则可通过延伸螺杆增加长度。其中螺杆本体与延伸螺杆的连接沿轴向采同心连接方式,且彼此的螺纹接续。由于左旋螺杆和右旋螺杆通过同心安装配置的皮带轮连接至驱动模块的马达,当马达通过皮带旋转皮带轮时,即可带动左旋螺杆及右旋螺杆同时作动,并允许对应的螺帽在螺杆本体与延伸螺杆的范围内位移。再者,左旋螺杆和右旋螺杆上的螺帽通过滑块作为转接板设置于线轨上,即可平稳地实现夹片跟随螺帽同步左右平移,完成长行程的夹取作业。
3、本发明的再一目的在于提供一种模块化夹爪。其中螺杆本体、延伸板、延伸螺杆、螺帽、线轨、延伸轨等组件采用双侧对称的设计,有助于实现模块化,且易于拆换调整,实现不同行程的夹取件业。当夹爪结构有增加行程长度需求时,通过双侧增设延伸螺杆、延伸板以及延伸轨而增加行程长度,毋需重新设计夹爪结构,有助于增加产品应用的多元性。
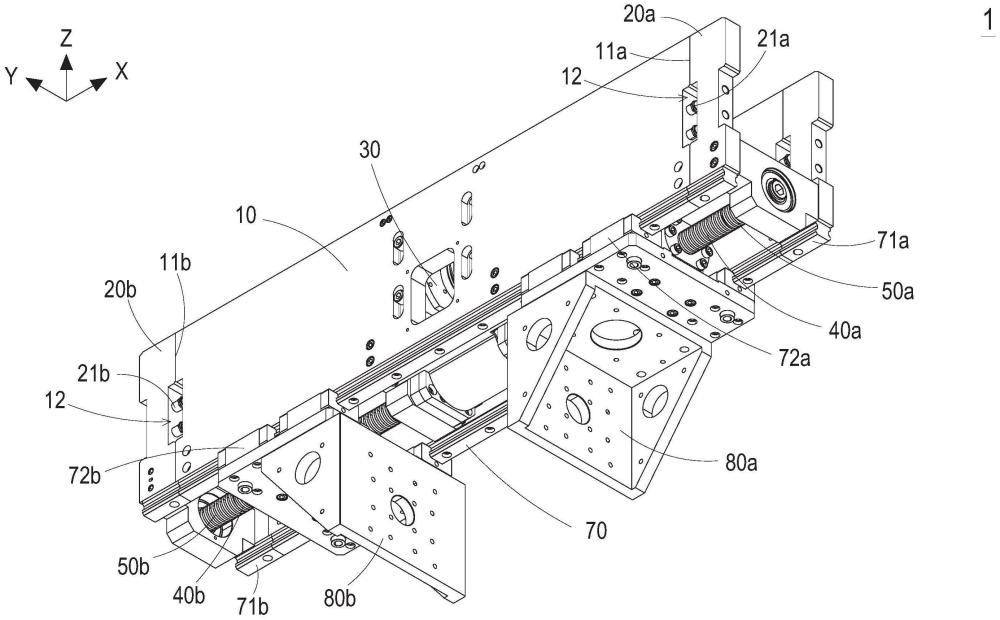
4、为达前述目的,本发明提供一种模块化夹爪,包括本体固定板、第一延伸板、第二延伸板、驱动模块、第一螺杆本体、第二螺杆本体、第一延伸螺杆、第二延伸螺杆、第一螺帽以及第二螺帽。本体固定板于第一方向上具有彼此相反的两对接端。第一延伸板以及第二延伸板彼此呈双侧对称(bilaterally symmetrical),且于第一方向上分别通过第一连接件以及第二连接件可拆地对接至本体固定板的两对接端。驱动模块设置于本体固定板。第一螺杆本体以及第二螺杆本体彼此呈双侧对称,设置于本体固定板,且于第一方向上同心排列(concentrically arranged),其中第一螺杆本体包括第一驱动端以及第一延伸端,第二螺杆本体包括第二驱动端以及第二延伸端,第一驱动端与第二驱动端于第一方向上彼此相向,且连接至驱动模块,其中第一延伸端与第二延伸端于第一方向上彼此相反设置。第一延伸螺杆以及第二延伸螺杆,彼此呈双侧对称,其中第一延伸螺杆可拆地对接至第一延伸端,且第一延伸螺杆的螺纹接续第一螺杆本体的螺纹;其中第二延伸螺杆可拆地对接至第二延伸端,且第二延伸螺杆的螺纹接续第二螺杆本体的螺纹。第一螺帽以及第二螺帽,彼此呈双侧对称,且分别套设并配对至第一螺杆本体以及第二螺杆本体,于驱动模块驱动第一螺杆本体与第一延伸螺杆同步旋转时,允许第一螺帽于第一方向上相对第一螺杆本体以及第一延伸螺杆位移,且于驱动模块驱动第二螺杆本体与第二延伸螺杆同步旋转时,允许第二螺帽于第一方向上相对第二螺杆本体以及第二延伸螺杆位移,第一螺帽与第二螺帽彼此接近或远离而实现一夹取作业。
技术特征:
1.一种模块化夹爪,包括:
2.如权利要求1所述的模块化夹爪,其中每一该第一连接件以及该第二连接件均包括一第一锁固件、一第二锁固件以及一限制件,该第一锁固件与该第二锁固件呈同心排列,该第一锁固件的操作端与该第二锁固件的操作端彼此相向,且该限制器设置于该第一锁固件以及该第二锁固件之间,组配限制该第一锁固件以及该第二锁固件彼此轴向距离,其中该第一延伸板与该本体固定板对接时以及该第二延伸板与该本体固定板对接时分别更形成一窗口,该第一锁固件的操作端与该第二锁固件的操作端通过该窗口外露。
3.如权利要求1所述的模块化夹爪,其中该第一螺杆本体具有一第一本体外螺纹,该第二螺杆本体具有一第二本体外螺纹,该第一本体外螺纹与该第二本体外螺纹的旋转方向相反,该第一延伸螺杆具有一第一延伸外螺纹,该第二延伸螺杆具有一第二延伸外螺纹,该第一延伸外螺纹与该第二延伸外螺纹的旋转方向相反;其中该第一本体外螺纹的终点接续该第一延伸外螺纹的起点,该第二本体外螺纹的终点接续该第二延伸螺杆的该第二延伸外螺纹的起点。
4.如权利要求3所述的模块化夹爪,其中该第一延伸螺杆包括一第一结合部以及一第一支撑部,该第一结合部可拆地对接至该第一延伸端,该第一支撑部枢接至该第一延伸板;其中该第二延伸螺杆包括一第二结合部以及一第二支撑部,该第二结合部可拆地对接至该第二延伸端,该第二支撑部枢接至该第二延伸板。
5.如权利要求4所述的模块化夹爪,其中该第一延伸外螺纹的起点具有一第一延伸螺纹入旋角角度,该第一螺杆本体包括一第一前结合螺孔设置于该第一延伸端,该第一结合部包括一第一结合外螺纹,对应该第一前结合螺孔,其中该第一结合外螺纹的起点具有一第一结合外螺纹入旋角角度,该第一延伸螺纹入旋角角度等于该第一结合外螺纹入旋角角度,其中该第二延伸外螺纹的起点具有一第二延伸螺纹入旋角角度,该第二螺杆本体包括一第二前结合螺孔设置于该第二延伸端,该第二结合部包括一第二结合外螺纹,对应该第二前结合螺孔,其中该第二结合外螺纹的起点具有一第二结合外螺纹入旋角角度,该第二延伸螺纹入旋角角度等于该第二结合外螺纹入旋角角度。
6.如权利要求5所述的模块化夹爪,其中该第一结合部还包括一第一定位段,设置于该第一结合外螺纹以及该第一延伸外螺纹之间,该第一螺杆本体包括一第一前定位通口,于空间上相对于该第一定位段,该第一前结合螺孔通过该第一前定位通口对外连通;该第二结合部还包括一第二定位段,设置于该第二结合外螺纹以及该第二延伸外螺纹之间,该第二螺杆本体包括一第二前定位通口,于空间上相对于该第二定位段,该第二前结合螺孔通过该第二前定位通口对外连通。
7.如权利要求1所述的模块化夹爪,其中该第一螺杆本体包括一第一前结合螺孔设置于该第一延伸端,该第一延伸螺杆包括一第一后结合螺孔以及一第一支撑部分别设置于相反的两端,该第一支撑部枢接至该第一延伸板,该第一前结合螺孔以及该第一后结合螺孔啮合分别与一第一结合件的两相反端啮合,使该第一延伸螺杆对接至该第一螺杆本体的该第一延伸端;其中该第二螺杆本体包括一第二前结合螺孔设置于该第二延伸端,该第二延伸螺杆包括一第二后结合螺孔以及一第二支撑部分别设置于相反的两端,该第二支撑部枢接至该第二延伸板,该第二前结合螺孔以及该第二后结合螺孔啮合分别与一第二结合件的两相反端啮合,使该第二延伸螺杆对接至该第二螺杆本体的该第二延伸端。
8.权利要求7所述的模块化夹爪,其中该第一结合件包括一第一定位本体、一第一前结合外螺纹以及一第一后结合外螺纹,该第一前结合外螺纹以及该第一后结合外螺纹分别设置于该第一定位本体的相反两端,组配与该第一前结合螺孔以及该第一后结合螺孔啮合,该第一螺杆本体包括一第一前定位通口,于空间上相对于该第一定位本体,该第一前结合螺孔通过该第一前定位通口对外连通,该第一延伸螺杆包括一第一后定位通口,于空间上相对于该第一定位本体,该第一后结合螺孔通过该第一后定位通口对外连通;其中该第二结合件包括一第二定位本体、一第二前结合外螺纹以及一第二后结合外螺纹,该第二前结合外螺纹以及该第二后结合外螺纹分别设置于该第二定位本体的相反两端,组配与该第二前结合螺孔以及该第二后结合螺孔啮合,该第二螺杆本体包括一第二前定位通口,于空间上相对于该第二定位本体,该第二前结合螺孔通过该第二前定位通口对外连通,该第二延伸螺杆包括一第二后定位通口,于空间上相对于该第二定位本体,该第二后结合螺孔通过该第二后定位通口对外连通。
9.如权利要求1所述的模块化夹爪,其中该驱动模块包括一马达、一皮带以及一皮带轮,该皮带轮连接至该第一螺杆本体的该第一驱动端以及该第二螺杆本体的该第二驱动端,该马达设置于该本体固定板,通过该皮带连接至该皮带轮,组配驱动该皮带轮,并带动该第一螺杆本体与该第二螺杆本体同心旋转。
10.如权利要求1所述的模块化夹爪,还包括一线轨、一第一延伸轨、一第二延伸轨、一第一滑块以及一第二滑块,该线轨沿该第一方向设置于该本体固定板,于空间上相对于该第一螺杆本体以及该第二螺杆本体,该第一延伸轨以及该第二延伸轨彼此呈双侧对称且分别设置于该第一延伸板及该第二延伸板,且分别连接至该线轨的两端,其中该第一滑块连接至该第一螺帽,且允许与该第一螺帽于该第一方向上相对该线轨以及该第一延伸轨同步位移;其中该第二滑块连接至该第二螺帽,且允许与该第二螺帽于该第一方向上相对该线轨以及该第二延伸轨同步位移。
11.如权利要求10所述的模块化夹爪,还包括一第一夹片以及一第二夹片,分别固定于该第一滑块以及该第二滑块,于该驱动模块驱动该第一螺杆本体、该第一延伸螺杆、该第二螺杆本体以及该第二延伸螺杆旋转时,驱使该第一螺帽、该第一滑块以及该第一夹片接近或远离该第二螺帽、该第二滑块以及该第二夹片而实现该夹取作业。
技术总结
本发明提供一种模块化夹爪,包括固定板本体、驱动模块、二螺杆本体、二延伸板、二延伸螺杆以及二螺帽。成对螺杆本体、延伸板、延伸螺杆及螺帽均呈双侧对称。二螺杆本体沿第一方向同心排列,连接至驱动模块,受驱动模块带动而旋转。二延伸板分别通过连接件可拆地对接至固定板本体的两侧。二延伸螺杆分别连接至二螺杆本体,延伸螺杆的螺纹接续螺杆本体的螺纹。二螺帽分别套设于二螺杆本体,于驱动模块驱动二螺杆本体与二延伸螺杆同步旋转时,允许带动二螺帽于第一方向上相对螺杆本体及延伸螺杆位移,彼此接近或远离而实现一夹取作业。
技术研发人员:陈信桦,王兆祥
受保护的技术使用者:台达电子工业股份有限公司
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!