一种带维稳功能的移动协作机器人的制作方法
本发明涉及机器人,具体为一种带维稳功能的移动协作机器人。
背景技术:
1、随着社会的发展,生产力的提高,越来越多的行业使用机器人来代替人工。传统的工业机器人虽然解决了不少生产上的问题但在很多场景的使用上仍然存在很多不足,如现有移动协作机器人与协作机械臂之间刚性连接,在移动协作机器人通过不平整路面时,会将移动协作机器人的不稳定状态传递至协作机械臂,影响协作机械臂的稳定性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种带维稳功能的移动协作机器人,解决了现有移动协作机器人在通过不平整路面时由于移动协作机器人与协作机械臂之间的刚性连接造成的移动协作机器人将自身的不稳定状态传递至协作机械臂,影响协作机械臂的稳定性的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
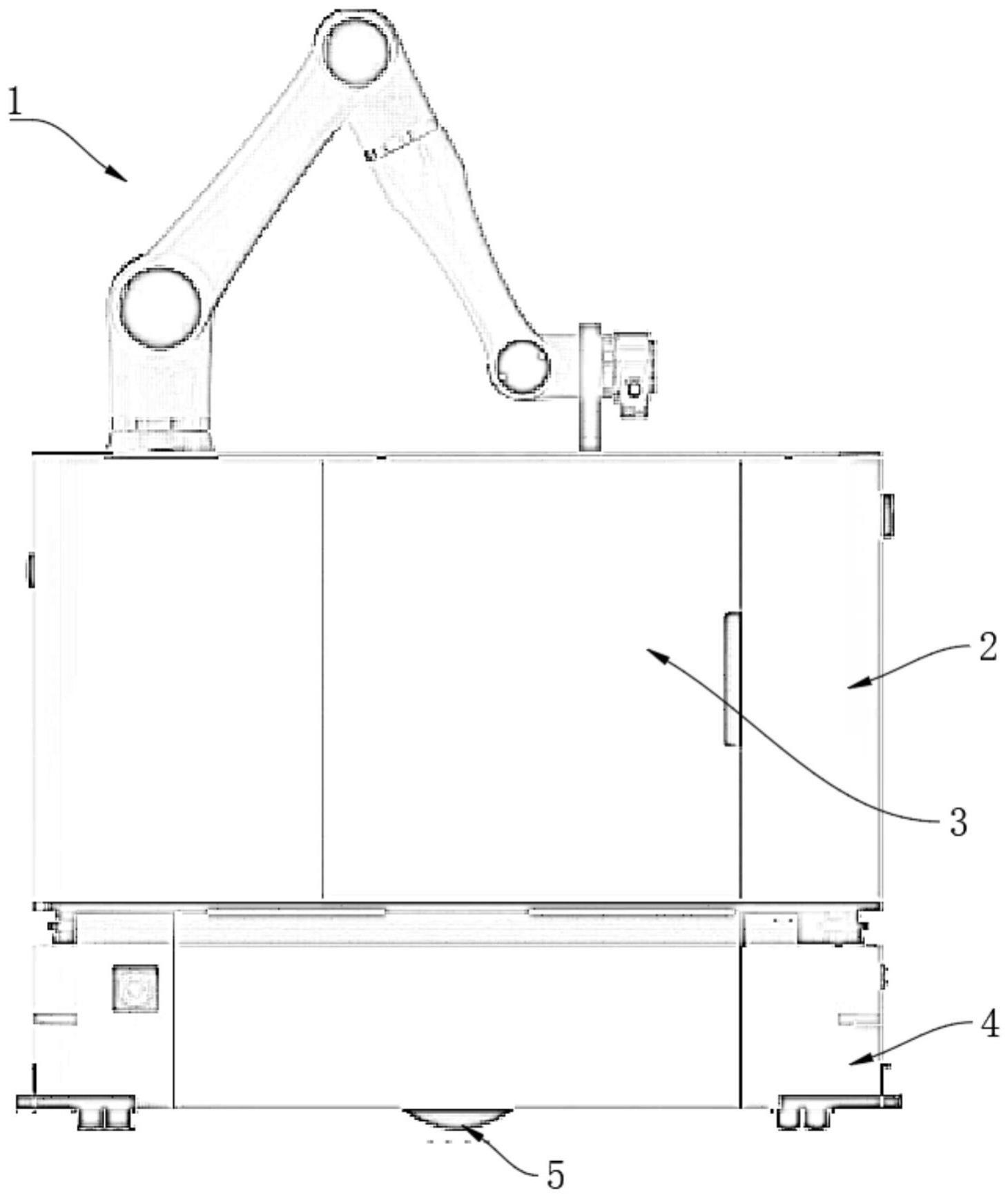
3、一种带维稳功能的移动协作机器人,包括移动臂,所述移动臂设置于维稳部上,所述维稳部设置于移动部上,所述移动部上设置有移动轮,所述维稳部上设置有检修口。
4、优选的,所述移动臂包括连接段,所述连接段设置有若干组,若干组所述连接段依次连接,且若干所述连接段首尾端分别与固定座、连接座连接,若干所述连接段之间通过转动部连接,所述连接段与固定座、连接座通过转动部连接。
5、优选的,所述转动部包括驱动轴,所述驱动轴与电机固定连接,所述驱动轴固定连接于连接段,所述驱动轴上固定连接有第一齿轮,所述第一齿轮外周设置有第三齿轮,所述第三齿轮与第一齿轮之间设置有第二齿轮,所述第二齿轮与第三齿轮、第一齿轮啮合,所述第三齿轮上设置有第一限位槽,所述第二齿轮部分位于第一限位槽内,所述第三齿轮与另一组连接段固定连接。
6、优选的,所述维稳部包括外壳及设置于外壳内的位姿传感器,所述位姿传感器用于检测所述维稳部的姿态,所述维稳部内设置有处理器,所述处理器与位姿传感器电性连接,所述处理器用于接收位姿传感器发送的信号,并根据接受到的信号控制所述转动部的电机,通过电机驱动连接段改变姿态。
7、所述外壳固定连接于移动部,所述外壳固定连接于移动部,所述外壳上固定连接有支柱,所述支柱上固定连接有顶板,所述顶板上设置有维稳框架,所述顶板边侧贯穿转动连接有第一转轴,所述第一转轴上连接有第一连杆,所述第一连杆下端与维稳框架下端转动连接;
8、所述维稳框架呈“”状。
9、优选的,所述维稳框架上方设置有安置板,所述安置板下方固定连接有第一维稳杆、第二维稳杆、第三维稳杆,且所述第一维稳杆、第二维稳杆、第三维稳杆位于所述维稳框架与安置板之间;
10、所述维稳框架与固定座固定连接。
11、优选的,所述维稳框架侧壁固定连接有固定板,所述固定板上转动连接有第二连杆,所述第二连杆另一端转动连接于第一维稳杆;
12、所述第一维稳杆与第二维稳杆之间设置有第三连杆、维稳弹簧,所述第三连杆一端转动连接于第一维稳杆,且所述第三连杆与第一维稳杆固定连接,所述第一维稳杆另一端固定连接有维稳弹簧,所述维稳弹簧转动连接于第二维稳杆;
13、所述第三维稳杆上固定连接有第一滑杆,所述第一滑杆滑动连接于滑槽内,所述滑槽设置于限位板,所述限位板固定连接于维稳框架。
14、优选的,所述移动部包括外壳、内支撑块,所述外壳设置于内支撑块外侧,所述外壳滑动连接于内支撑块;
15、所述内支撑块固定连接有轮轴,所述轮轴上转动连接有移动轮;
16、所述内支撑块上固定连接有第二滑杆;
17、所述外壳上设置有第二限位槽,所述第二滑杆滑动连接于第二限位槽内。
18、优选的,所述内支撑块上固定连接有第一支撑杆、第二支撑杆,所述外壳内壁固定连接有第三支撑杆,所述第一支撑杆、第二支撑杆、第三支撑杆位于外壳与内支撑块之间;
19、所述第一支撑杆与导向杆中段位置转动连接,所述导向杆上端与导向板一端转动连接,所述导向板另一端转动连接于第三支撑杆;
20、所述导向板上设置有导向槽;
21、所述第二支撑杆上固定连接有第三滑杆,所述第三滑杆滑动连接于导向槽。
22、优选的,所述内支撑块下表面固定连接有第四支撑杆,所述第四支撑杆与导向杆之间设置有弹簧,所述弹簧两端分别与第四支撑杆、导向杆固定连接。
23、优选的,所述外壳上设置有开口。
24、相比现有技术,本发明至少包括以下有益效果:
25、在移动臂与移动部之间设置维稳部,通过维稳部将移动轮通过不平整路面时的不稳定状态进行过滤,并采集维稳部的姿态信息控制移动臂做相应运动,减少了路面对于移动臂的影响,解决了现有移动协作机器人在通过不平整路面时由于移动协作机器人与协作机械臂之间的刚性连接造成的移动协作机器人将自身的不稳定状态传递至协作机械臂,影响协作机械臂的稳定性的问题。
技术特征:
1.一种带维稳功能的移动协作机器人,其特征在于:
2.根据权利要求1所述的一种带维稳功能的移动协作机器人,其特征在于:
3.根据权利要求2所述的一种带维稳功能的移动协作机器人,其特征在于:
4.根据权利要求2所述的一种带维稳功能的移动协作机器人,其特征在于:
5.根据权利要求4所述的一种带维稳功能的移动协作机器人,其特征在于:
6.根据权利要求5所述的一种带维稳功能的移动协作机器人,其特征在于:
7.根据权利要求6所述的一种带维稳功能的移动协作机器人,其特征在于:
8.根据权利要求1所述的一种带维稳功能的移动协作机器人,其特征在于:
9.根据权利要求8所述的一种带维稳功能的移动协作机器人,其特征在于:
10.根据权利要求9所述的一种带维稳功能的移动协作机器人,其特征在于:
技术总结
本发明公开了一种带维稳功能的移动协作机器人,涉及机器人技术领域,包括移动臂,所述移动臂设置于维稳部上,所述维稳部设置于移动部上,所述移动部上设置有移动轮,所述维稳部上设置有检修口。在移动臂与移动部之间设置维稳部,通过维稳部将移动轮通过不平整路面时的不稳定状态进行过滤,并采集维稳部的姿态信息控制移动臂做相应运动,减少了路面对于移动臂的影响,解决了现有移动协作机器人在通过不平整路面时由于移动协作机器人与协作机械臂之间的刚性连接造成的移动协作机器人将自身的不稳定状态传递至协作机械臂,影响协作机械臂的稳定性的问题。
技术研发人员:杨一鸣,刘伟,刁忍,詹彬,刘权
受保护的技术使用者:深圳墨影科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!