融合姿态测量与一维力传感器信息的模糊变阻抗控制方法与流程
本发明涉及机器人运动控制,更具体的说是一种融合姿态测量与一维力传感器信息的模糊变阻抗控制方法。
背景技术:
1、近年来康养理疗领域的冲击波理疗机器人、按摩机器人等得到快速发展,机器人工作时主要从法向的方向以垂直的方式对人体进行理疗按摩。理疗、按摩机器人需要与人体进行物理接触。因此,为了实现理疗按摩的安全性,需要对理疗按摩方向进行交互力控制。
2、为了实现安全的交互力控制,常采用的力/力矩传感器有两种方式:一是采用关节力矩传感器,即每个关节安装一个力矩传感器;二是采用末端六维力/力矩传感器。两种方式虽然各有利弊,但有一个共同的缺点就是成本昂贵。因此,开发低成本的力控是本发明需要解决的问题。
技术实现思路
1、针对现有交互力控制方法成本昂贵的不足,本发明的主要目的在于提供一种融合姿态测量与一维力传感器信息的模糊变阻抗方法,以提供低成本、高精度的交互力控制方案,为冲击波理疗机器人、按摩机器人提供安全交互力控制方法。
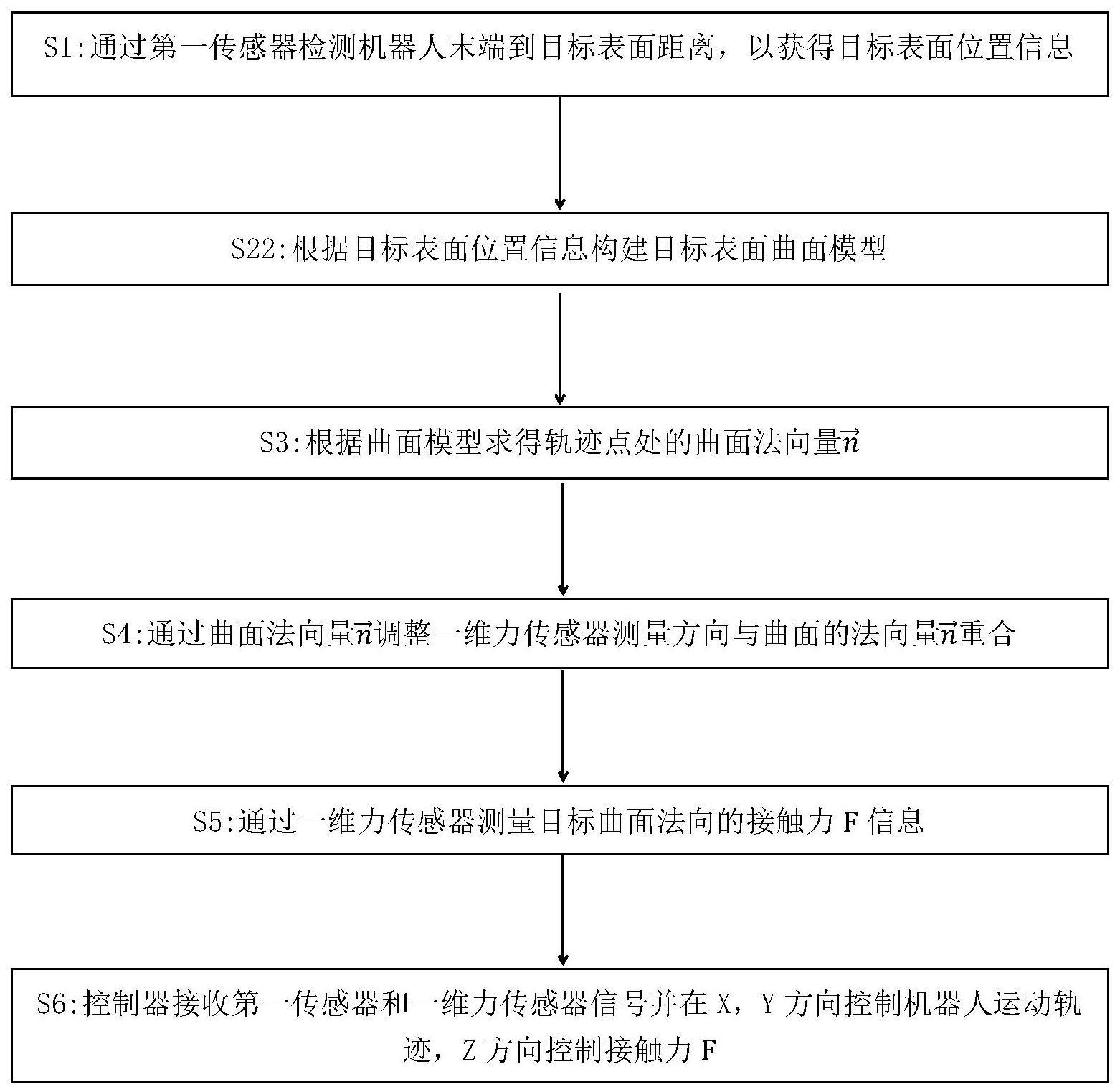
2、为实现上述目的,本发明提供了如下技术方案:融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,包括步骤s1:通过第一传感器检测机器人末端到目标表面距离,以获得目标表面位置信息;
3、步骤s2:根据目标表面位置信息构建目标表面曲面模型;
4、步骤s3:根据曲面模型求得轨迹点处的曲面法向量
5、步骤s4:通过曲面法向量调整一维力传感器测量方向与曲面的法向量重合;
6、步骤s5:通过一维力传感器测量目标曲面法向的接触力f信息;
7、步骤s6:控制器接收第一传感器和一维力传感器信号并在x,y方向控制机器人运动轨迹,z方向控制接触力f。
8、作为本发明的进一步改进,步骤s1中第一传感器由多个tof激光距离传感器组成。
9、作为本发明的进一步改进,步骤s2中目标表面位置信息使用最小二乘法或者曲面拟合法构建目标表面曲面模型。
10、作为本发明的进一步改进,步骤s3中曲面法向量的求得包括以下步骤:
11、步骤s31、对曲面模型方程各变量求偏导;
12、步骤s32、代入δh轨迹点处数据求得δh轨迹点处曲面沿x和y方向曲面切向量;
13、步骤s33、根据曲面切向量求得δh轨迹点处的曲面法向量。
14、作为本发明的进一步改进,步骤s6中的控制器包括正运动学回路和逆运动学回路,所述一维力传感器设置在正运动学回路内,所述逆运动学回路内设有算法模块并与一维力传感器连接,所述算法模块用于接收一维力传感器信号并给出执行端需求变量。
15、作为本发明的进一步改进,所述算法模块定义目标阻抗为
16、
17、其中fext为机械臂末端产生相应的外力,m、b、k分别为位置控制的质量、阻尼系数和刚度系数,ex、分别为阻抗控制作用下机械臂末端的运动位置偏差、速度偏差与加速度偏差。
18、作为本发明的进一步改进,所述逆运动学回路内设有模糊变阻抗参数调节模块,所述模糊变阻抗参数调节模块与算法模块连接并用于调整阻尼系数b。
19、作为本发明的进一步改进,所述阻尼系数基于模糊规则进行设计。
20、作为本发明的进一步改进,所述逆运动学回路内还设有滑模控制器,所述滑模控制器分别连接算法模块和一维力传感器,所述滑模控制器用于为算法模块同滑模控制。
21、作为本发明的进一步改进,所述滑模模块对应趋近律为双曲切函数。
22、本发明的有益效果:
23、1、通过传感器获得目标表面数据,并通过该数据进行目标曲面模型建立,进而实现一维力传感器测量方向始终与曲面法向量重合,以保证机器人相较于目标表面的垂直。
24、2、通过一维力传感器和第一传感器的设置配合控制器实现对机器人方位的调整,并且通过正运动学回路和逆运动学回路的设置保证对运动偏差值的修正;
25、3、仅通过一维力传感器和tof激光测距传感器完成检测感应效果,简单可行,成本低。
技术特征:
1.融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:包括步骤s1:通过第一传感器检测机器人末端到目标表面距离,以获得目标表面位置信息;
2.根据权利要求1所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:步骤s1中第一传感器由多个tof激光距离传感器组成。
3.根据权利要求2所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:步骤s2中目标表面位置信息使用最小二乘法或者曲面拟合法构建目标表面曲面模型。
4.根据权利要求1所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:步骤s3中曲面法向量的求得包括以下步骤:
5.根据权利要求1所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:步骤s6中的控制器包括正运动学回路和逆运动学回路,所述一维力传感器设置在正运动学回路内,所述逆运动学回路内设有算法模块并与一维力传感器连接,所述算法模块用于接收一维力传感器信号并给出执行端需求变量。
6.根据权利要求5所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:所述算法模块定义目标阻抗为
7.根据权利要求6所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:所述逆运动学回路内设有模糊变阻抗参数调节模块,所述模糊变阻抗参数调节模块与算法模块连接并用于调整阻尼系数b。
8.根据权利要求6所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:所述阻尼系数基于模糊规则进行设计。
9.根据权利要求5所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:所述逆运动学回路内还设有滑模控制器,所述滑模控制器分别连接算法模块和一维力传感器,所述滑模控制器用于为算法模块同滑模控制。
10.根据权利要求9所述的融合姿态测量与一维力传感器信息的模糊变阻抗控制方法,其特征在于:所述滑模模块对应趋近律为双曲切函数。
技术总结
本发明公开了融合姿态测量与一维力传感器信息的模糊变阻抗控制方法包括步骤S1:通过第一传感器检测机器人末端到目标表面距离,获得目标表面位置信息,步骤S2:根据目标表面位置信息构建目标表面曲面模型,步骤S3:根据曲面模型求得轨迹点处的曲面法向量,步骤S4:通过曲面法向量调整一维力传感器测量方向与曲面的法向量重合,步骤S5:通过一维力传感器测量目标曲面法向的接触力信息,步骤S6:控制器接收第一传感器和一维力传感器信号并在X,Y方向控制机器人运动轨迹,Z方向控制接触力,是一种稳定、简单可行、成本低的解决方案。
技术研发人员:李银鑫,范鹏灿,禹超,安轲,谈全一,张斌,朵天泽,吴方勇
受保护的技术使用者:浙江钧控智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!