一种大尺度轻量化的张力驱动型空间机械臂
本发明属于空间机械臂,尤其涉及一种大尺度轻量化的张力驱动型空间机械臂。
背景技术:
1、空间机器人如今已经是太空任务的主要承担对象,目前空间机器人技术已经获得了许多研究成果,但仍存在以下方面的问题:
2、一是,在面对大型空间非合作目标(如小行星)时,需要同时增加空间机械臂的臂展长度,以增加机械爪的力矩;对于传统的机械臂而言,如中国专利“cn104070535b”公开的“一种多节折叠式遥操作机械臂”,驱动关节转动的电机是直接安装在关节处的,增大机械臂的尺寸会导致关节电机转矩需求的上升,进而导致关节电机质量非线性大幅度增长,从而导致整个机械臂的质量难以控制在理想范围内,无法实现轻量化的目的,故为了适应大型空间非合作目标的抓取而增加空间机械臂尺寸的同时,如何保证机械臂的质量并不产生非线性的大幅增长,实现机械臂轻量化的目的,是目前大尺度空间机械臂亟需解决的问题。
3、二是,空间机械臂尺寸增加的同时,也会增加外包装体积,无法适应运载火箭狭窄的货物空间。
技术实现思路
1、本发明需要解决的技术问题是:为了适应大型空间非合作目标的抓取而增加空间机械臂尺寸的同时,如何保证机械臂的质量并不产生非线性的大幅增长,实现机械臂轻量化的目的,是目前大尺度空间机械臂亟需解决的问题;本申请进而提供一种大尺度轻量化的张力驱动型空间机械臂,通过改变连接关节的结构以及驱动方式,减小关节处的力矩,进而减小电机的输出力矩,电机的质量不产生非线性的增长,实现机械臂轻量化的目的。
2、本发明为解决上述技术问题采用的技术方案是:
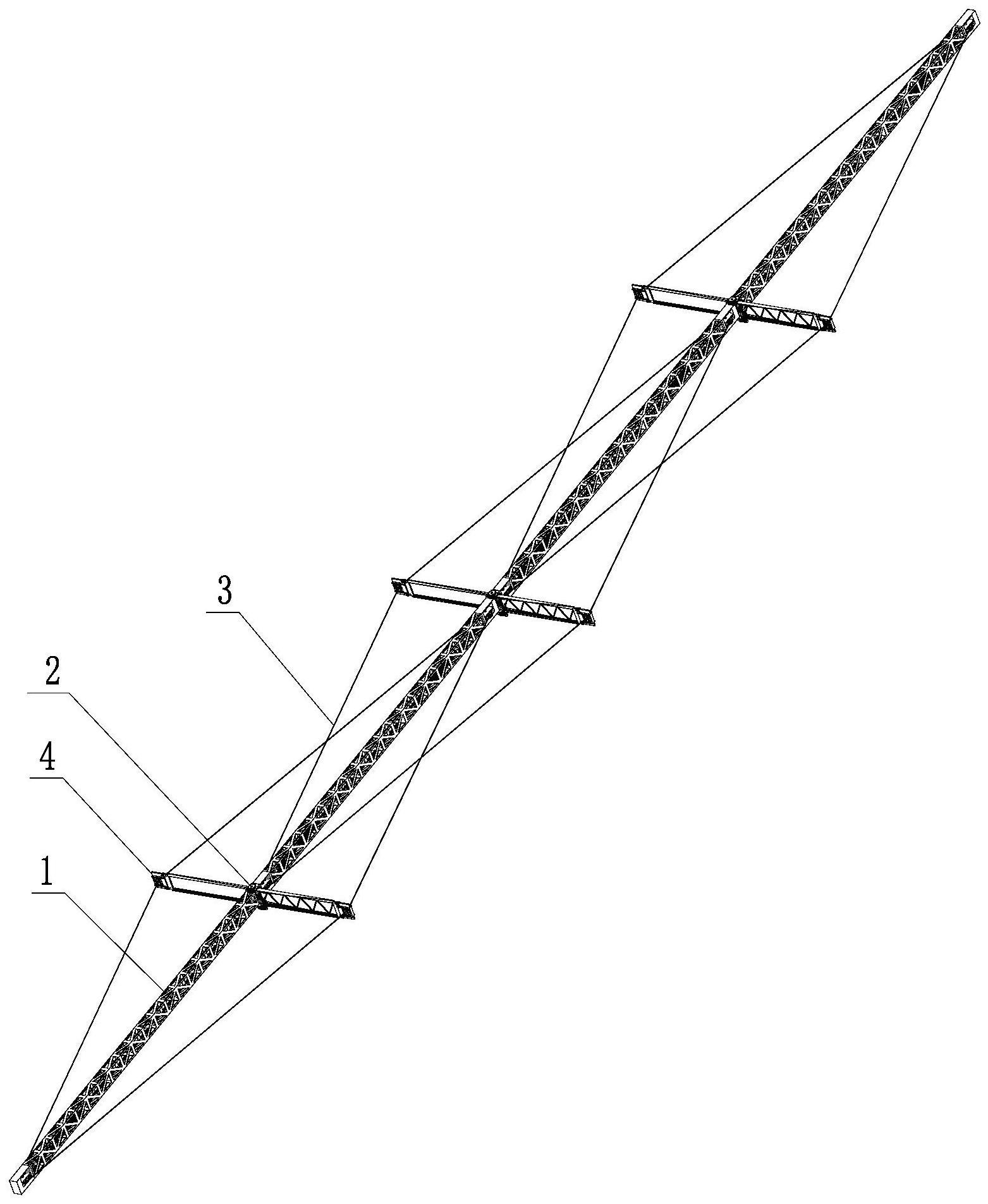
3、一种大尺度轻量化的张力驱动型空间机械臂,它包括若干节节臂、若干个连接关节、若干个绳驱机构和若干个横向支撑机构;若干节节臂串联成一根机械臂,每相邻的两节节臂之间通过一个连接关节进行铰连接,且每相邻的两节节臂之间通过一个绳驱机构进行驱动,以实现关节处的弯曲;每个连接关节与一个横向支撑机构进行滑动连接,相邻的两节节臂分别处于横向支撑机构的两侧;所述相邻的两节节臂、一个连接关节、一个绳驱机构和一个横向支撑机构构成一个关节驱动模块;
4、所述的绳驱机构包括驱动电机、减速器、绞盘、导向轮、柔性驱动绳和两组柔性驱动绳张紧组件,所述的驱动电机、减速器、绞盘和其中一组柔性驱动绳张紧组件安装在其中一节节臂上,并设置在远离连接关节的一端,驱动电机的输出端与减速器的输入端连接,减速器的输出端与绞盘固定连接,所述的导向轮和另一组柔性驱动绳张紧组件安装在另一节节臂上,并设置在远离连接关节的一端;所述的柔性驱动绳为环形,柔性驱动绳绕过所述其中一组柔性驱动绳张紧组件后,柔性驱动绳的两端反向绕过绞盘并分别穿过横向支撑机构的两端,最后柔性驱动绳的两端反向绕过导向轮并套在所述另一组柔性驱动绳张紧组件上;所述的柔性驱动绳在横向支撑机构的支撑下形成四边形结构,且在两组柔性驱动绳张紧组件的作用下始终处于张紧状态。
5、进一步的,所述的柔性驱动绳为缆绳;所述的绞盘为差分绞盘,差分绞盘是由同轴固定连接的两个外径不同的绞盘组成。
6、进一步的,每组柔性驱动绳张紧组件包括一个第一滑轮和一根弹簧,所述弹簧的一端固定连接在节臂上,弹簧的另一端通过滑轮支架与第一滑轮进行连接。
7、进一步的,所述的连接关节包括中间铰链板、两个夹层铰链板和两个外层铰链板,两个夹层铰链板和两个外层铰链板分别对称设置在中间铰链板的两侧,处于同一侧的外层铰链板与夹层铰链板之间进行铰连接,两个夹层铰链板通过同一销轴铰连接在中间铰链板上,两个所述的外层铰链板分别与相邻的两节节臂进行固定连接,所述的中间铰链板与横向支撑机构进行滑动连接。
8、进一步的,所述的外层铰链板与夹层铰链板之间设置有卡块和卡槽,二者通过卡块和卡槽的配合实现固定连接。
9、进一步的,所述的中间铰链板为工字型结构,中间铰链板的底部与顶部分别开有一个滑槽。
10、进一步的,所述的横向支撑机构包括横撑与滑移牵引组件,所述的滑移牵引组件同时安装在中间铰链板上与横撑上,所述的横撑为长方形架体,横撑内的上下两端沿其长度方向分别设置有滑轨,所述的中间铰链板与横撑之间通过滑槽与滑轨的配合并在滑移牵引组件的牵引力下实现横撑与连接关节之间沿着自身的长度方向直线移动与固定不动。
11、进一步的,在机械臂工作时,所述的连接关节处于横撑的中间位置处。
12、进一步的,所述横撑的两端设置有第二滑轮,用于绳驱机构中柔性驱动绳的支撑与导向。
13、进一步的,所述的滑移牵引组件包括两个电机、两个蜗轮蜗杆减速器、两个第三绞盘和两根绳索;两个所述的电机、蜗轮蜗杆减速器和第三绞盘分别安装在中间铰链板的上下两端面上,所述电机的输出端与蜗轮蜗杆减速器的输入端连接,蜗轮蜗杆减速器的输出端与第三绞盘固定连接,绳索的一端缠绕在第三绞盘上,绳索的另一端固定在横撑的端部并张紧;所述的横撑通过两根绳索的收绳与放绳实现移动。
14、本发明与现有技术相比产生的有益效果是:
15、1、本申请为了实现机械臂轻量化的目的,除了对每节节臂、连接关节以及横撑采用框架式结构来减轻其本身的质量,同时也对机械臂的驱动方式进行了改变,即采用柔性驱动绳驱动与差分绞盘的组合形式以及横撑的设计大大降低了空间机械臂驱动电机的转矩需求,使得电机的质量不会产生非线性大幅度增长,使机械臂长度增加的同时质量增长幅度大幅降低,给超大尺寸的空间机械臂设计提供了一种可行的方案。
16、2、本申请通过连接关节的设计可以实现每个关节驱动模块中相邻两节节臂之间的360°周向旋转,从而使得整个机械臂z字型折叠为排状,减小了机械臂聚拢状态时的体积;同时可以周向旋转的关节也增加了机械臂的工作空间。
17、3、本申请的机械臂在柔性驱动绳的张紧力下具有较高的刚度,使机械臂刚度要求下降。
技术特征:
1.一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:它包括若干节节臂(1)、若干个连接关节(2)、若干个绳驱机构(3)和若干个横向支撑机构(4);若干节节臂(1)串联成一根机械臂,每相邻的两节节臂(1)之间通过一个连接关节(2)进行铰连接,且每相邻的两节节臂(1)之间通过一个绳驱机构(3)进行驱动,以实现关节处的弯曲;每个连接关节(2)与一个横向支撑机构(4)进行滑动连接,相邻的两节节臂(1)分别处于横向支撑机构(4)的两侧;所述相邻的两节节臂(1)、一个连接关节(2)、一个绳驱机构(3)和一个横向支撑机构(4)构成一个关节驱动模块;
2.根据权利要求1所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述的柔性驱动绳(3-7)为缆绳;所述的绞盘(3-3)为差分绞盘,差分绞盘是由同轴固定连接的两个外径不同的绞盘组成。
3.根据权利要求1所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:每组柔性驱动绳张紧组件包括一个第一滑轮(3-5)和一根弹簧(3-6),所述弹簧(3-6)的一端固定连接在节臂(1)上,弹簧(3-6)的另一端通过滑轮支架与第一滑轮(3-5)进行连接。
4.根据权利要求1所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述的连接关节(2)包括中间铰链板(2-1)、两个夹层铰链板(2-2)和两个外层铰链板(2-3),两个夹层铰链板(2-2)和两个外层铰链板(2-3)分别对称设置在中间铰链板(2-1)的两侧,处于同一侧的外层铰链板(2-3)与夹层铰链板(2-2)之间进行铰连接,两个夹层铰链板(2-2)通过同一销轴铰连接在中间铰链板(2-1)上,两个所述的外层铰链板(2-3)分别与相邻的两节节臂(1)进行固定连接,所述的中间铰链板(2-1)与横向支撑机构(4)进行滑动连接。
5.根据权利要求4所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述的外层铰链板(2-3)与夹层铰链板(2-2)之间设置有卡块(2-6)和卡槽(2-7),二者通过卡块(2-6)和卡槽(2-7)的配合实现固定连接。
6.根据权利要求4所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述的中间铰链板(2-1)为工字型结构,中间铰链板(2-1)的底部与顶部分别开有一个滑槽(2-1-1)。
7.根据权利要求6所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述的横向支撑机构(4)包括横撑(4-1)与滑移牵引组件,所述的滑移牵引组件同时安装在中间铰链板(2-1)上与横撑(4-1)上,所述的横撑(4-1)为长方形架体,横撑(4-1)内的上下两端沿其长度方向分别设置有滑轨(4-1-1),所述的中间铰链板(2-1)与横撑(4-1)之间通过滑槽(2-1-1)与滑轨(4-1-1)的配合并在滑移牵引组件的牵引力下实现横撑(4-1)与连接关节(2)之间沿着自身的长度方向直线移动与固定不动。
8.根据权利要求7所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:在机械臂工作时,所述的连接关节(2)处于横撑(4-1)的中间位置处。
9.根据权利要求7所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述横撑(4-1)的两端设置有第二滑轮(4-1-2),用于绳驱机构(3)中柔性驱动绳(3-7)的支撑与导向。
10.根据权利要求7所述的一种大尺度轻量化的张力驱动型空间机械臂,其特征在于:所述的滑移牵引组件包括两个电机(4-2)、两个蜗轮蜗杆减速器(4-3)、两个第三绞盘(4-4)和两根绳索(4-6);两个所述的电机(4-2)、蜗轮蜗杆减速器(4-3)和第三绞盘(4-4)分别安装在中间铰链板(2-1)的上下两端面上,所述电机(4-2)的输出端与蜗轮蜗杆减速器(4-3)的输入端连接,蜗轮蜗杆减速器(4-3)的输出端与第三绞盘(4-4)固定连接,绳索(4-6)的一端缠绕在第三绞盘(4-4)上,绳索(4-6)的另一端固定在横撑(4-1)的端部并张紧;所述的横撑(4-1)通过两根绳索(4-6)的收绳与放绳实现移动。
技术总结
一种大尺度轻量化的张力驱动型空间机械臂,属于空间机械臂领域。本发明增加空间机械臂尺寸的同时,如何保证机械臂的质量并不产生非线性的大幅增长,实现机械臂轻量化的目的。本发明包括若干节节臂、若干个连接关节、若干个绳驱机构和若干个横向支撑机构;若干节节臂串联成一根机械臂,每相邻的两节节臂之间通过一个连接关节进行铰连接,且每相邻的两节节臂之间通过一个绳驱机构进行驱动,以实现关节处的弯曲;每个连接关节与一个横向支撑机构进行滑动连接,相邻的两节节臂分别处于横向支撑机构的两侧;所述相邻的两节节臂、一个连接关节、一个绳驱机构和一个横向支撑机构构成一个关节驱动模块。本发明主要用于空间非合作目标的抓取。
技术研发人员:李雪皑,王君扬,孙奎,曹宝石,谢宗武,刘宏
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!