机器人车系统的制作方法
本申请属于核电,具体涉及一种机器人车系统。
背景技术:
1、核电站以核反应堆来代替火电站的锅炉,以核燃料在核反应堆中发生特殊形式的“燃烧”产生热量,使核能转变成热能来加热水产生蒸汽。核电站的系统和设备通常由两大部分组成:核的系统和设备,又称为核岛;常规的系统和设备,又称为常规岛。核电站运行中所产生的风险与传统电站相比,主要是其具有放射性。当核岛发生重特大核事故时,核岛厂房内部辐射剂量极高,救援人员无法进入完成救援及探测任务。
技术实现思路
1、因此,本申请要解决的技术问题在于提供一种机器人车系统,能够使救援人员靠近事故现场,并通过遥控机器人进入高放环境,进行救援操作及现场监测。
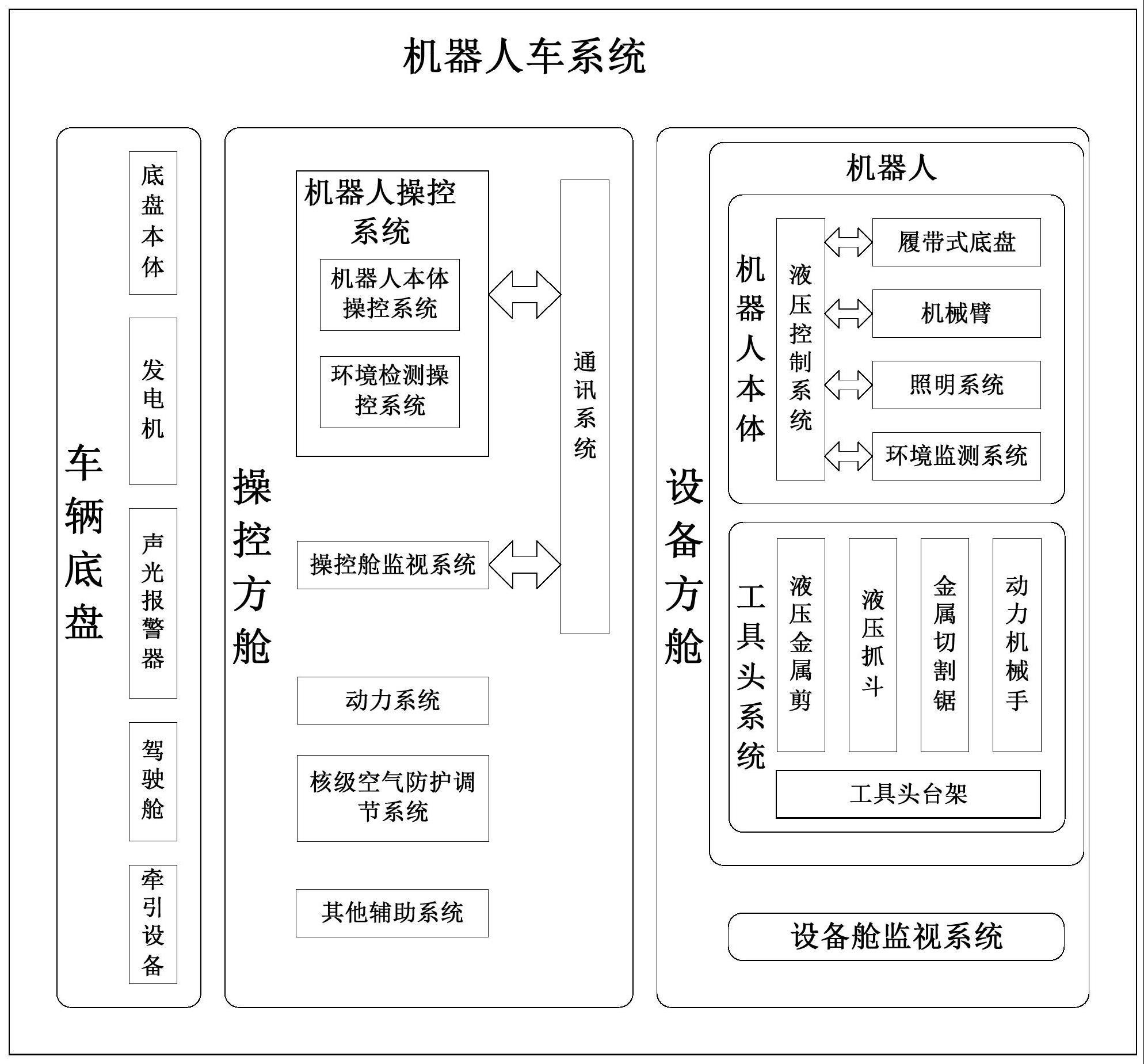
2、为了解决上述问题,本申请提供了一种机器人车系统,包括:车辆底盘、设备方舱和操控方舱。车辆底盘包括底盘本体、牵引设备及驾驶舱。牵引设备连接于底盘本体,用于牵引底盘本体移动。驾驶舱设置于底盘本体上,用于容纳驾驶员。驾驶舱内部设有屏蔽层。用于屏蔽核辐射。设备方舱设置于底盘本体上。备方舱中包括机器人。机器人能够进出设备方舱。操控方舱设置于底盘本体上,用于容纳操作人员。操控方舱内包括核级空气防护调节系统、机器人操控系统及动力系统。核级空气防护调节系统用于向操控方舱内输送空气。机器人操控系统用于遥控机器人。动力系统用于为核级空气防护调节系统和机器人操控系统提供动力。
3、可选地,机器人车系统还包括:设备方舱监控系统、机器人监控系统、操控方舱监控系统以及视讯终端。设备方舱监控系统设置于设备方舱中,用于记录设备方舱内的情况。机器人监控系统设置于机器人上,用于记录机器人的工作进度及工作环境。操控方舱监控系统设置于操控方舱中,用于记录操控方舱内的情况。视讯终端设置于操控方舱,且分别连接设备方舱监控系统、机器人监控系统、操控方舱监控系统。
4、可选地,机器人包括:机器人本体和工具头系统。机器人本体包括机身、履带式底盘和机械臂。机身设置于履带式底盘上。机械臂设置于机身上。机械臂的自由端设有快换接头。工具头系统包括工具头台架及至少一个工具头。工具头设置于工具头台架上。机器人本体能够通过机械臂上的快换接头与工具头快速连接。
5、可选地,机器人本体上还包括:环境监测系统、照明系统及液压控制系统。环境监测系统用于获取环境样本并进行检测。照明系统用于提供光源。液压控制系统用于驱动机器人本体执行动作指令。
6、可选地,工具头为多个,包括:液压金属剪、液压抓斗、金属切割锯及动力机械手。
7、可选地,机器人操控系统包括:机器人本体操控系统和环境检测操控系统。机器人本体操控系统用于控制机器人本体。环境检测操控系统用于控制环境检测系统。
8、可选地,核级空气防护调节系统包括:空调系统、组合式过滤器、风机及压差报警器。空调系统用于调节操控方舱中的温度。组合式过滤器用于对进入操控方舱中的空气进行过滤。风机用于驱动空气经组合式过滤器进入操控方舱,并将操控方舱内的空气排出操控方舱之外,并在操控方舱中建立正压。压差报警器用于监测操控方舱内外的压差。
9、可选地,底盘本体的尾部设有液压升降尾板,用于辅助机器人到达地面或登上底盘本体。
10、可选地,机器人车系统还包括:发电机。发电机设置于底盘本体上,用于为设备方舱和操控方舱供电。
11、可选地,驾驶舱顶部设有声光报警器。
12、有益效果
13、本发明的实施例中所提供的机器人车系统包括车辆底盘、设备方舱和操控方舱。车辆底盘包括牵引设备,能够带动底盘本体移动。设备方舱和操控方舱均设置于车辆底盘,设备方舱中包括机器人。机器人能够进出设备方舱,以便于出入事故现场。本实施例的机器人车系统在使用时,可以先使操作人员进入操控方舱,驾驶员进入驾驶舱内;之后由驾驶员的驾驶车辆底盘达到事故现场附近或进入事故现场;之后操控方舱内的操作人员即可控制设备方舱中的机器人下车,替代救援人员完成救援和侦查任务。本发明的机器人车系统能够使救援人员靠近事故现场,并通过遥控机器人进行救援操作及现场监测。利用本发明的机器人车系统靠近事故现场,更有利于救援人员观察现场情况,以降低对机器人操作的难度。
技术特征:
1.一种机器人车系统,其特征在于,包括:
2.根据权利要求1所述的机器人车系统,其特征在于,还包括:
3.根据权利要求1所述的机器人车系统,其特征在于,所述机器人包括:
4.根据权利要求3所述的机器人车系统,其特征在于,所述机器人本体上还包括:
5.根据权利要求3所述的机器人车系统,其特征在于,所述工具头为多个,包括:液压金属剪、液压抓斗、金属切割锯及动力机械手。
6.根据权利要求3所述的机器人车系统,其特征在于,所述机器人操控系统包括:
7.根据权利要求1所述的机器人车系统,其特征在于,所述核级空气防护调节系统包括:
8.根据权利要求1所述的机器人车系统,其特征在于,所述底盘本体的尾部设有液压升降尾板,用于辅助所述机器人到达地面或登上所述底盘本体。
9.根据权利要求1所述的机器人车系统,其特征在于,还包括:
10.根据权利要求1所述的机器人车系统,其特征在于,所述驾驶舱顶部设有声光报警器。
技术总结
本申请提供了一种机器人车系统,属于核电技术领域,用于进行核事故的应急救援和监测。机器人车系统包括:车辆底盘包括底盘本体、牵引设备及驾驶舱。牵引设备连接于底盘本体,驾驶舱设置于底盘本体上。驾驶舱内部设有屏蔽层,用于屏蔽核辐射。设备方舱设置于底盘本体上。设备方舱中包括机器人。机器人能够进出设备方舱。操控方舱设置于底盘本体上。操控方舱内包括核级空气防护调节系统、机器人操控系统及动力系统。核级空气防护调节系统用于向操控方舱内输送洁净空气。机器人操控系统用于遥控机器人。动力系统用于为核级空气防护调节系统和机器人操控系统提供动力。利用本申请的机器人车系统更有利于救援人员观察现场情况,以降低对机器人操作的难度。
技术研发人员:孙国庆,严成勇,冯建可,梁思光,王成林,朱志强
受保护的技术使用者:中核检修有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!