一种转移机械手的制作方法
本发明涉及物料转移,更具体地说,涉及一种转移机械手。
背景技术:
1、在制药设备生产中需要进行自动上下料、铝箔膜冲裁转运放膜等工序,需要一种可实现膜、卡等不同物料的快速、精准抓放的装备,以保证物料迅速转移。然而,现有技术中大多采用人工方式对物料在不同工位进行转移,导致操作过程较为繁琐、转移效率较低。
2、综上所述,如何实现物料的快速精准抓放,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供一种转移机械手,可有效实现物料的快速、精准抓放操作,且可保证物料初始被抓吸时处于竖直或水平或其它状态姿位,则会在摆动过程和转移交接卸放时状态姿位保持不变。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种转移机械手,包括:箱体、设于所述箱体内的从动带轮、用于驱动所述从动带轮转动的同步带驱动件、设于所述箱体一侧的摇臂基座、空心轴、水平设于所述箱体内的箱体主轴、固定带轮、用于夹抓或吸抓物料的取料组件以及用于固定所述取料组件的带轮轴;
4、所述从动带轮和所述摇臂基座分别设于所述空心轴两端,所述空心轴穿设安装在所述箱体主轴的外周部,所述摇臂基座和所述空心轴可围绕所述箱体主轴同步转动,所述固定带轮与所述箱体主轴的端部连接,所述固定带轮和所述带轮轴均设于所述摇臂基座内,所述带轮轴的外周部与所述固定带轮的外周部绕设有第二同步带;
5、所述摇臂基座内设有偏心轴,涨紧带轮通过轴承套设在所述偏心轴上,所述涨紧带轮用于对所述第二同步带进行张紧。
6、优选的,所述同步带驱动件包括伺服电机、设于所述箱体下方的悬吊座、水平设于所述悬吊座内的悬吊轴、主动带轮以及竖直分布的第一同步带;
7、所述伺服电机通过过渡板安装在所述悬吊座上,所述伺服电机与所述悬吊轴的一端连接,所述主动带轮套设于所述悬吊轴的另一端,所述第一同步带套设在所述从动带轮和所述主动带轮的外周部。
8、优选的,所述箱体底部对称设有至少两个吊杆,所述吊杆穿过所述悬吊座与吊板连接;
9、所述吊板与所述悬吊座底部相接触,所述吊杆和所述吊板可拆卸连接。
10、优选的,所述空心轴通过定位轴承穿设安装在所述箱体主轴的外周部,所述定位轴承通过支撑套筒和锁紧螺母与所述摇臂基座轴向固定。
11、优选的,所述箱体主轴通过连接板安装在所述箱体上,所述固定带轮通过张紧套安装在所述箱体主轴的一端。
12、优选的,所述带轮轴通过轴承穿设安装在所述摇臂基座上,所述摇臂基座内设有用于限定所述带轮轴轴向位置的轴承压板。
13、优选的,所述箱体的一侧设有可拆卸的箱盖,所述摇臂基座的一侧设有可拆卸的摇臂盖。
14、优选的,所述取料组件包括用于夹抓硬质物料的第一组件,所述第一组件包括安装在所述带轮轴上的夹抓固定座、两个平行设于所述夹抓固定座上的平行气爪以及安装在所述平行气爪上的气爪夹手,所述气爪夹手可开闭、以夹取或松开所述硬质物料。
15、优选的,所述取料组件包括用于吸抓软质物料的第二组件,所述第二组件包括安装在所述带轮轴上的吸料固定座、设于所述吸料固定座上的吸嘴固套、安装在所述吸料固定座和所述吸嘴固套之间的弹性吸嘴;
16、所述弹性吸嘴为中空结构,所述弹性吸嘴的上部装有压缩弹簧,在所述压缩弹簧的弹力作用下所述弹性吸嘴被向下推压,所述弹性吸嘴下部和所述吸嘴固套内周部之间装有轴套,所述弹性吸嘴可在所述轴套内滑动,所述吸料固定座开设有用于连接快插接头的通气孔,以抽真空使所述吸嘴固套产生吸力。
17、在使用本发明所提供的转移机械手时,当需要在转移物料时,可以通过取料组件夹抓或吸抓物料,而后,控制同步带驱动件运行,以驱动从动带轮转动,从动带轮转动时可带动空心轴转动,以使摇臂基座和空心轴围绕箱体主轴转动,带轮轴及固定在其上的取料组件和物料等会随着摇臂基座同步摆动。故本装置可实现90°、180°或其它角度的往复摆动,也可实现单方向的顺时针或逆时针转动,以实现物料的抓吸转移运送。
18、并且,箱体主轴和固定带轮以及带轮轴不周向旋转,摇臂基座摆动时,在第二同步带的张紧作用下,带轮轴及固定在其上的取料组件和物料会在摆动过程中以固定带轮为轴心绕固定带轮运动,实现物料的转移。因此,使用本装置时,带轮轴及固定在其上的取料组件和物料等与水平台面板或地面的夹角始终保持不变,也即物料初始被抓吸时处于竖直或水平或其它状态姿位,则物料在摆动过程和转移交接卸放时状态姿位保持不变。
19、综上所述,本发明所提供的转移机械手,可有效实现物料的快速、精准抓放操作,且可保证物料初始被抓吸时处于竖直或水平或其它状态姿位,则会在摆动过程和转移交接卸放时状态姿位保持不变。
技术特征:
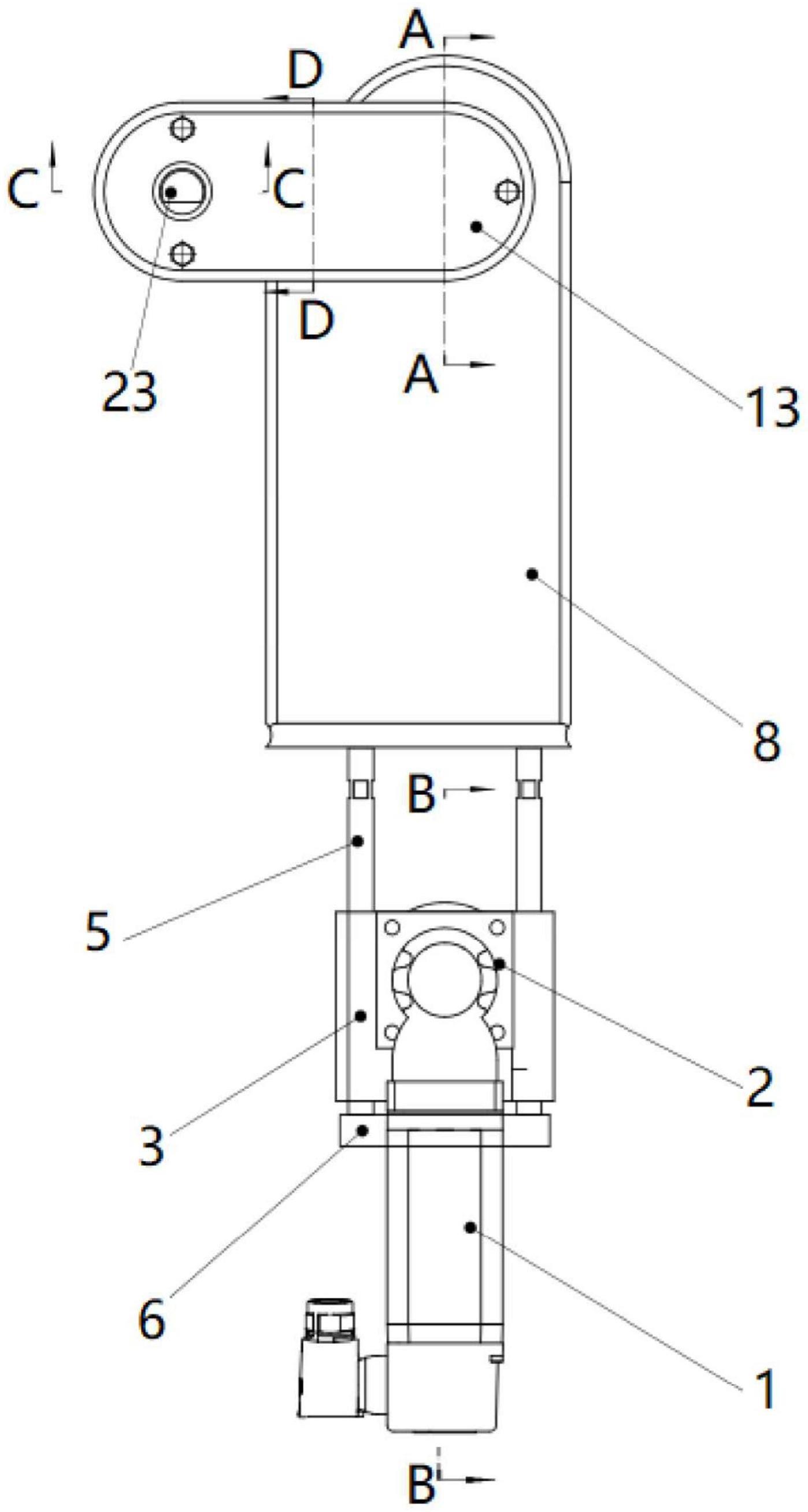
1.一种转移机械手,其特征在于,包括:箱体(8)、设于所述箱体(8)内的从动带轮(16)、用于驱动所述从动带轮(16)转动的同步带驱动件、设于所述箱体(8)一侧的摇臂基座(12)、空心轴(19)、水平设于所述箱体(8)内的箱体主轴(15)、固定带轮(21)、用于夹抓或吸抓物料的取料组件以及用于固定所述取料组件的带轮轴(23);
2.根据权利要求1所述的转移机械手,其特征在于,所述同步带驱动件包括伺服电机(1)、设于所述箱体(8)下方的悬吊座(3)、水平设于所述悬吊座(3)内的悬吊轴(4)、主动带轮(7)以及竖直分布的第一同步带(17);
3.根据权利要求2所述的转移机械手,其特征在于,所述箱体(8)底部对称设有至少两个吊杆(5),所述吊杆(5)穿过所述悬吊座(3)与吊板(6)连接;
4.根据权利要求1所述的转移机械手,其特征在于,所述空心轴(19)通过定位轴承(42)穿设安装在所述箱体主轴(15)的外周部,所述定位轴承(42)通过支撑套筒(18)和锁紧螺母(20)与所述摇臂基座(12)轴向固定。
5.根据权利要求1至4任一项所述的转移机械手,其特征在于,所述箱体主轴(15)通过连接板安装在所述箱体(8)上,所述固定带轮(21)通过张紧套(22)安装在所述箱体主轴(15)的一端。
6.根据权利要求1至4任一项所述的转移机械手,其特征在于,所述带轮轴(23)通过轴承(39)穿设安装在所述摇臂基座(12)上,所述摇臂基座(12)上设有用于限定所述带轮轴(23)轴向位置的轴承压板(24)。
7.根据权利要求1至4任一项所述的转移机械手,其特征在于,所述箱体(8)的一侧设有可拆卸的箱盖(9),所述摇臂基座(12)的一侧设有可拆卸的摇臂盖(13)。
8.根据权利要求1至4任一项所述的转移机械手,其特征在于,所述取料组件包括用于夹抓硬质物料(40)的第一组件,所述第一组件包括安装在所述带轮轴(23)上的夹抓固定座(30)、两个平行设于所述夹抓固定座(30)上的平行气爪(32)以及安装在所述平行气爪(32)上的气爪夹手(33),所述气爪夹手(33)可开闭、以夹取或松开所述硬质物料(40)。
9.根据权利要求8所述的转移机械手,其特征在于,所述取料组件包括用于吸抓软质物料(41)的第二组件,所述第二组件包括安装在所述带轮轴(23)上的吸料固定座(34)、设于所述吸料固定座(34)上的吸嘴固套(35)、安装在所述吸料固定座(34)和所述吸嘴固套(35)之间的弹性吸嘴(36);
技术总结
本发明公开了一种转移机械手,涉及物料转移技术领域,其包括:箱体、从动带轮、用于驱动从动带轮转动的同步带驱动件、摇臂基座、空心轴、水平设于箱体内的箱体主轴、固定带轮、用于夹抓或吸抓物料的取料组件以及用于固定取料组件的带轮轴;从动带轮和摇臂基座分别设于空心轴两端,空心轴穿设安装在箱体主轴的外周部,摇臂基座和空心轴可围绕箱体主轴同步转动,固定带轮与箱体主轴的端部连接,固定带轮和带轮轴均设于摇臂基座内,带轮轴的外周部与固定带轮的外周部绕设有第二同步带;摇臂基座内设有偏心轴,涨紧带轮通过轴承套设在偏心轴上,涨紧带轮用于对第二同步带进行张紧。本装置可有效实现物料的快速、精准抓放操作。
技术研发人员:蔡天赐,潘旭辉,王东,王健,侯国旭
受保护的技术使用者:山东新华医疗器械股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!