一种变刚度转动关节
本发明涉及机器人活动关节,特别是涉及一种变刚度转动关节。
背景技术:
1、随着机器人技术的发展,机器人越来越多地进入到工业生产与生活当中,目前绝大多数机器人的结构是刚性的,这种机器人的优势在于模型精确,控制方便,负载能力大,适合于在结构化环境下完成劳动强度大、重复性高的任务。然而在航空航天以及医疗卫生领域,由于强调环境顺应性与交互友好性,柔软机器人的设计与研发逐渐受到重视。
2、作为柔性机器人的重要组成部分,柔性变刚度关节的设计当前主要基于机械式的变刚度原理,例如基于杠杆原理,通过改变关节输出与关节内置弹性单元的传递比来调节关节刚度,或者通过调节关节内置弹簧的预紧程度来调控关节刚度。这种机械式的变刚度方法往往还需要专门的电机来对刚度进行调节,使整个关节的体积以及制造成本进一步增大。
3、巨电流变液作为一种新型智能材料,其力学性能可调,响应速度快,给变刚度关节的设计带来了新的思路。相较于机械式的变刚度,巨电流变液作为一种液体新材料,其占用体积小,设计结构简单,有利于变刚度关节的小型化,此外,由于巨电流变液剪切屈服应力在场强控制下可以实现两个数量级以上的数值变化,因此该变刚度方法潜力巨大。
4、磁流变液也是一种可控的智能流体材料,与巨电流变液不同的是,磁流变液需要在磁场作用下才能实现流变效应,发明专利cn109015739b公开了“一种康复机器人变刚度柔性关节”,包括传动套筒、线圈骨架、主动隔环、从动盘、从动隔环、主动盘、大隔圈、线圈挡板、两个导磁端板、轴承端盖和输入轴,该发明采用的是传统离合器式的旋转机构设计,主动盘的力矩通过磁流变液传递至从动盘,通过调节磁场来改变磁流变液的力学性能,进而改变力矩传递效率,实现输出转动刚度的变化,由于该柔性关节仍然需要依靠转轴驱动,故一般只能选择马达作为动力源,限制了该变刚度柔性关节的使用场景。此外,线圈及相关零部件的存在增大了关节体积,同时使制造成本上升。
技术实现思路
1、本发明的目的是提供一种变刚度转动关节,以解决现有技术存在的问题,通过调节巨电流变液两端电压实现转动刚度可调,无需其他驱动装置,结构更加简单,更易于减小转动关节的体积,有利于进行小型化、轻量化设计。
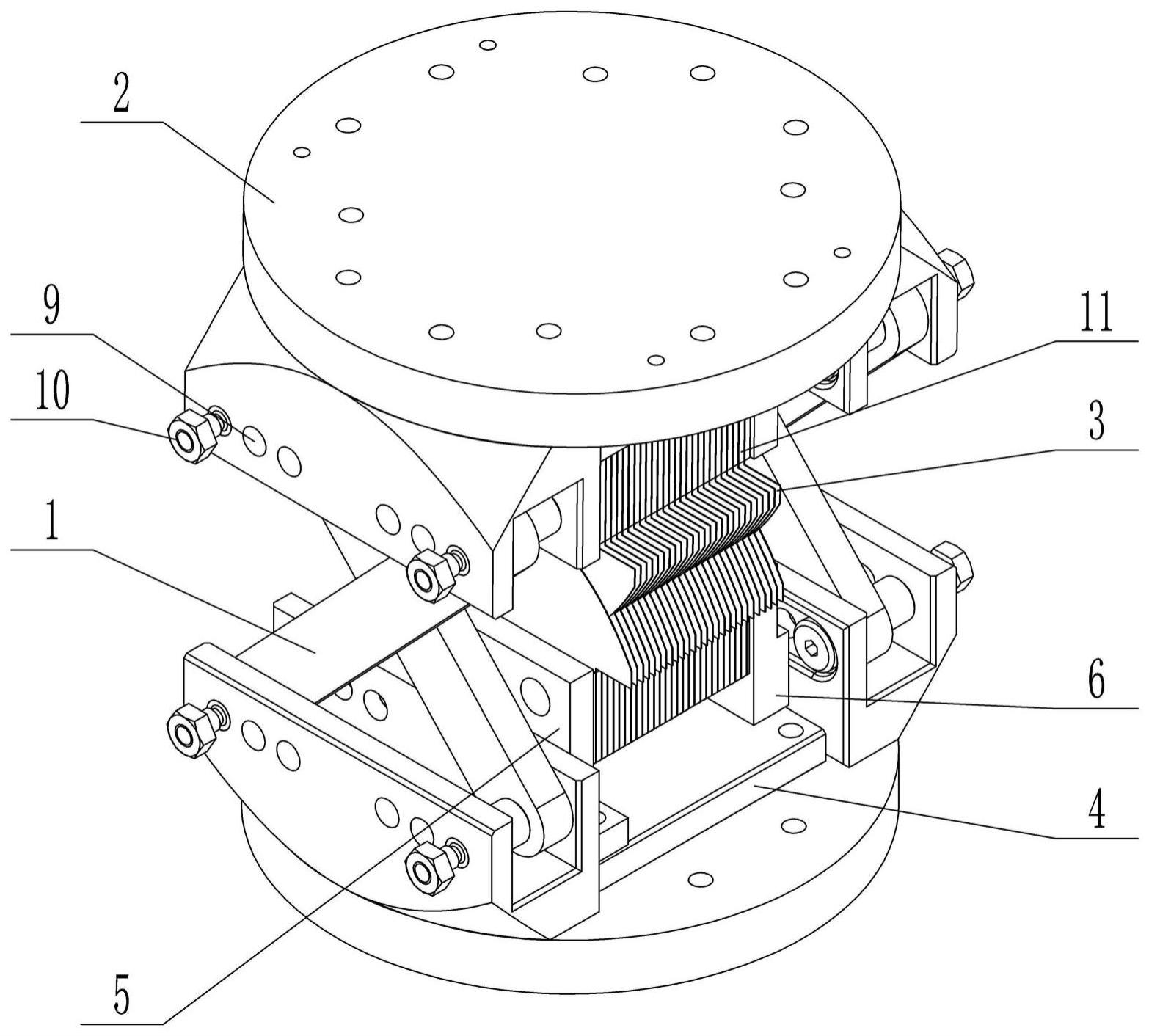
2、为实现上述目的,本发明提供了如下方案:本发明提供一种变刚度转动关节,包括两关节单元和用于连接两关节单元的连杆,所述关节单元包括固定座和间隔固定在所述固定座上的若干极板,两所述关节单元中的所述极板均与供电装置电连接,且两所述关节单元中的所述极板极性相反并交错层叠设置,交错层叠设置的相邻所述极板之间的缝隙中填充有巨电流变液;所述连杆分布在所述极板的侧部,并交叉设置,所述连杆的两端分别与两所述关节单元中的所述固定座铰接。
3、优选的,所述极板上还包覆有一层绝缘pi薄膜。
4、优选的,所述固定座上设置有固定夹持片和滑动夹持片,所述极板设置在所述固定夹持片与所述滑动夹持片之间,所述固定夹持片、所述滑动夹持片以及所述极板上均对应设置有至少两个通孔,所述连接件穿过所述通孔将三者固定。
5、优选的,所述关节单元中相邻所述极板之间设置有垫片,所述垫片上开设有所述通孔。
6、优选的,所述连接件为子母铆钉。
7、优选的,所述固定座上还固定有底座,所述固定夹持片固定在所述底座的端部,所述底座上设置有t型部,所述滑动夹持片具有与所述t型部适配的t型开口,所述滑动夹持片可滑动地设置在所述t型部上。
8、优选的,所述固定座上间隔设置有铰接孔,铰链销穿过所述铰接孔将所述连杆的端部铰接;在两所述连杆的端部连线方向上,所述铰接孔间隔设置有若干个。
9、优选的,所述固定座的端面上还设置有若干用于连接其他构件的连接孔。
10、本发明相对于现有技术取得了以下技术效果:
11、本发明将反四连杆旋转机构与巨电流变液剪切模式变刚度机构相结合,构成了特殊的转动结构;并通过调节巨电流变液两端电压实现转动刚度可调。另外,本发明中的变刚度转动关节仅在巨电流变液两端施加电压即可,无需其他驱动装置,结构更加简单,更易于减小转动关节的体积,有利于进行小型化、轻量化设计。
技术特征:
1.一种变刚度转动关节,其特征在于,包括两关节单元和用于连接两关节单元的连杆,所述关节单元包括固定座和间隔固定在所述固定座上的若干极板,两所述关节单元中的所述极板均与供电装置电连接,且两所述关节单元中的所述极板极性相反并交错层叠设置,交错层叠设置的相邻所述极板之间的缝隙中填充有巨电流变液;所述连杆分布在所述极板的侧部,并交叉设置,所述连杆的两端分别与两所述关节单元中的所述固定座铰接。
2.根据权利要求1所述的变刚度转动关节,其特征在于,所述极板上还包覆有一层绝缘pi薄膜。
3.根据权利要求1所述的变刚度转动关节,其特征在于,所述固定座上设置有固定夹持片和滑动夹持片,所述极板设置在所述固定夹持片与所述滑动夹持片之间,所述固定夹持片、所述滑动夹持片以及所述极板上均对应设置有至少两个通孔,所述连接件穿过所述通孔将三者固定。
4.根据权利要求3所述的变刚度转动关节,其特征在于,所述关节单元中相邻所述极板之间设置有垫片,所述垫片上开设有所述通孔。
5.根据权利要求4所述的变刚度转动关节,其特征在于,所述连接件为子母铆钉。
6.根据权利要求3所述的变刚度转动关节,其特征在于,所述固定座上还固定有底座,所述固定夹持片固定在所述底座的端部,所述底座上设置有t型部,所述滑动夹持片具有与所述t型部适配的t型开口,所述滑动夹持片可滑动地设置在所述t型部上。
7.根据权利要求1~6任意一项所述的变刚度转动关节,其特征在于,所述固定座上间隔设置有铰接孔,铰链销穿过所述铰接孔将所述连杆的端部铰接;在两所述连杆的端部连线方向上,所述铰接孔间隔设置有若干个。
8.根据权利要求7所述的变刚度转动关节,其特征在于,所述固定座的端面上还设置有若干用于连接其他构件的连接孔。
技术总结
本发明公开一种变刚度转动关节,涉及机器人活动关节技术领域,包括两关节单元和用于连接两关节单元的连杆,关节单元包括固定座和间隔固定在固定座上的若干极板,两关节单元中的极板均与供电装置电连接,且两关节单元中的极板极性相反并交错层叠设置,交错层叠设置的相邻极板之间的缝隙中填充有巨电流变液;连杆分布在极板的侧部,并交叉设置,连杆的两端分别与两关节单元中的固定座铰接;本发明将反四连杆旋转机构与巨电流变液剪切模式变刚度机构相结合,构成了特殊的转动结构;并通过调节巨电流变液两端电压实现转动刚度可调,无需其他驱动装置,结构更加简单,更易于减小转动关节的体积,有利于进行小型化、轻量化设计。
技术研发人员:廖宁滨,孙翊,贾文川,蒲华燕,王敏,丁基恒
受保护的技术使用者:上海大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!